模型可靠性保证:MATLAB系统识别工具箱稳定性与鲁棒性分析
发布时间: 2024-12-09 22:04:43 阅读量: 10 订阅数: 19 

case24_ieee_rts_RTS可靠性_24节点数据_可靠性RTS_可靠性_IEEE-RTS系统

# 1. MATLAB系统识别工具箱概述
MATLAB系统识别工具箱为工程师和研究人员提供了一套功能强大的函数和应用程序,使他们能够创建、处理和分析各种系统识别问题。这些工具箱是基于先进的数学算法和理论,允许用户轻松地从数据中提取系统模型,并进一步分析系统的动态行为。
在当今的工程实践中,MATLAB工具箱被广泛应用于控制系统设计、信号处理、生物医学工程以及环境监测等多个领域。通过MATLAB系统识别工具箱,用户可以进行精确的系统建模和仿真,进而优化系统性能,减少测试和开发的时间和成本。
在本章节中,我们将简要介绍MATLAB系统识别工具箱的功能与优势,并为后续章节中更深入的技术讨论打下基础。随着内容的深入,我们将逐步探讨系统识别的理论基础,以及如何在MATLAB环境中实现稳定性分析、鲁棒性分析以及系统识别工具箱的进阶应用。
# 2. 系统识别的理论基础
## 2.1 系统识别的概念与重要性
### 2.1.1 系统识别的定义
系统识别是指从系统输入和输出数据中,通过数学和计算方法构建一个系统模型的过程。这个过程一般包括数据预处理、模型结构的确定、参数估计、模型验证和检验等步骤。系统识别在多个领域中都扮演着重要的角色,尤其是在控制系统、信号处理、经济预测等领域中,它帮助工程师和研究人员理解和预测系统的动态行为,为实际应用中的设计、分析和控制提供理论基础。
### 2.1.2 系统识别在工程应用中的作用
系统识别技术为工程师提供了一种从实际数据中获取系统动态信息的手段。这种信息是无法仅通过理论分析直接获得的。在工业控制系统设计、飞行器设计、机械振动分析等领域,系统识别使得工程师能够在实际操作中对系统进行精确的建模和仿真。例如,通过对飞行器控制系统进行系统识别,工程师可以得到一个准确的模型来预测飞行器在不同输入条件下的响应,这对于确保飞行安全至关重要。
## 2.2 系统建模理论
### 2.2.1 模型的类型和结构
系统模型通常分为两大类:线性和非线性模型。线性模型是系统分析中最常用的模型类型,因其数学解析方法相对成熟和简便。线性模型通常由差分方程或微分方程描述,适用于描述许多实际物理系统的基本特性。非线性模型更为复杂,能够描述系统在不同操作点的动态特性,但其分析和处理的复杂度也随之增加。根据系统的具体特性,可以采用时间序列模型、状态空间模型、传递函数模型等多种结构来构建模型。
### 2.2.2 系统辨识方法论
系统辨识方法可以分为几类,包括参数辨识方法和非参数辨识方法。参数辨识方法主要关注于找到一组模型参数,使得模型的输出与实际系统输出的差异最小。常见的参数辨识方法包括最小二乘法、极大似然估计、贝叶斯方法等。非参数辨识方法则不依赖于预先设定的模型结构,而是直接从数据中提取系统特性,比如谱分析和自回归滑动平均模型(ARMA)。不同的辨识方法有各自的优缺点,实际应用中应根据系统特性和数据情况选择合适的方法。
## 2.3 系统稳定性的数学原理
### 2.3.1 稳定性的定义和判定条件
系统稳定性是指系统在受到外部扰动或内部参数变化时,能够保持性能不发生显著变化的特性。在数学上,对于线性时不变系统,系统稳定性可以通过其传递函数或状态空间模型的极点来判断。一个系统稳定的充分必要条件是其所有极点都位于复平面的左半部分(对于离散系统,则是位于单位圆内部)。系统稳定性的判定条件对控制系统设计至关重要,因为一个不稳定系统是无法正常工作的。
### 2.3.2 系统稳定性的数学模型
系统稳定性的数学模型可以通过劳斯稳定判据、奈奎斯特稳定判据、伯德图等工具来分析。例如,劳斯稳定判据是通过构造劳斯表来判断系统的稳定性,它不需要计算系统的根,因此在工程应用中非常实用。稳定性分析是系统识别中的一个重要步骤,因为在识别一个模型后,必须确保模型是稳定且有效的,这样才能用于进一步的设计和分析。
### 2.3.3 系统稳定性的数学模型实例
考虑一个简单的线性时不变系统的状态空间模型:
\[
\begin{align*}
\dot{x}(t) &= Ax(t) + Bu(t) \\
y(t) &= Cx(t) + Du(t)
\end{align*}
\]
其中 \( x(t) \) 是系统状态向量,\( u(t) \) 是输入向量,\( y(t) \) 是输出向量,矩阵 \( A \)、\( B \)、\( C \) 和 \( D \) 定义了系统的动态特性。系统稳定性的判断可以通过矩阵 \( A \) 的特征值来进行。若矩阵 \( A \) 的所有特征值都有负的实部,则系统是稳定的。
为了进一步说明系统稳定性的重要性,让我们考虑一个典型的控制问题:如何设计一个控制器以确保给定系统的稳定性。
假设我们有一个需要被稳定化的系统模型:
\[
A =
\begin{bmatrix}
-1 & 1 \\
0 & -1
\end{bmatrix}
\]
通过劳斯稳定判据分析,我们构造劳斯表如下:
\[
\begin{array}{ccc}
s^2 & | & 1 & 0 \\
s & | & -1 & 0 \\
0 & | & 0 & 0 \\
\end{array}
\]
由于劳斯表的第一列中出现了零,我们看到这个系统是不稳定的。在实际应用中,我们需要对矩阵 \( A \) 的元素进行调整或使用特定的控制策略来确保系统稳定。这可能涉及到设计一个状态反馈控制器或者

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
MATLAB 系统识别工具箱专栏深入探讨了 MATLAB 中系统识别的基本概念和关键应用。从数据采集到模型验证,本专栏提供了全面的指南,涵盖了动态系统建模、噪声环境下的建模、模型优化策略、信号处理中的应用、自定义函数开发、机器学习集成、并行计算优化、模型可靠性分析、控制系统设计应用、交互式操作增强、模块化设计构建以及模型性能评估。通过深入解析和实际演练,本专栏旨在帮助读者掌握 MATLAB 系统识别工具箱,提升其在系统建模和分析方面的技能。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
提升Rational Rose顺序图效率的5个高级技巧

参考资源链接:[Rational Rose顺序图建模详细教程:创建、修改与删除](https://wenku.csdn.net/doc/6412b4d0be7fbd1778d40ea9?spm=1055.2635.3001.10343)
# 1. Rational Rose顺序图概述
## 简介
Rational Rose是IBM旗下的一款面向对象分析设计工具,广泛应用于软
【Prompt指令与用户体验】:设计高效AI互动体验的10大技巧

参考资源链接:[掌握ChatGPT Prompt艺术:全场景写作指南](https://wenku.csdn.net/doc/2b23iz0of6?spm=1055.2635.3001.10343)
# 1. Prompt指令的基础与用户交互
## 1.1 Prompt指令定义
在用户与人工智能(AI)系统交互中,Prompt指令充当着沟通桥梁的角色。它是一个明确的、可执行的命
快充技术实用攻略:IP5328优化策略提升功耗与效率
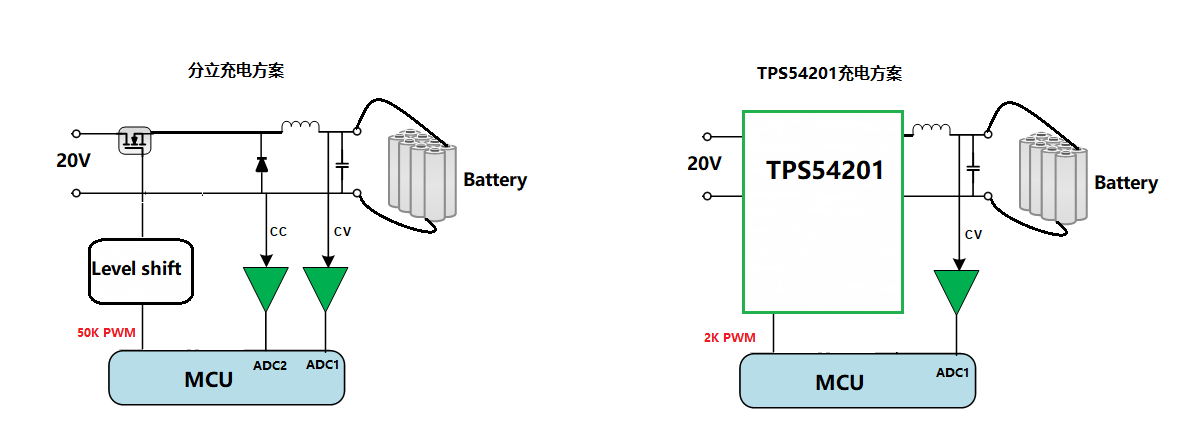
参考资源链接:[IP5328移动电源SOC:全能快充协议集成,支持PD3.0](https://wenku.csdn.net/doc/16d8bvpj05?spm=1055.2635.3001.10343)
# 1. 快充技术基础与IP5328芯片概述
## 1.1 快充技术
【iSecure Center 管理手册解读】:一步到位掌握iSecure Center运行管理秘籍

参考资源链接:[海康iSecure Center运行管理手册:部署、监控与维护详解](https://wenku.csdn.net/doc/2ibbrt393x?spm=1055.2635.3001.10343)
# 1. iSecure Center概述
在信息安全领域,iSecure Center作为一款集成的IT安全与合规管理解决方案,已被众多企业机构采用。它为IT安全团
SSD1309数据手册深度解读
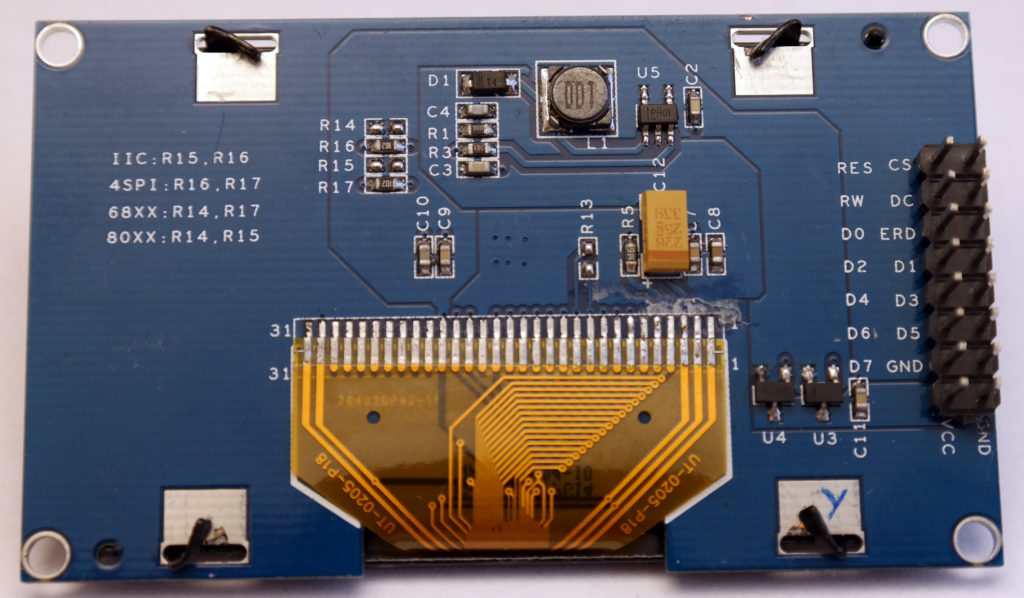
参考资源链接:[SSD1309: 128x64 OLED驱动控制器技术数据](https://wenku.csdn.net/doc/6412b6efbe7fbd1778d48805?spm=1055.2635.3001.10343)
# 1. SSD1309概览
本章将对SSD1309 OLED显示控制器进行全面介绍。SSD1309是一种广泛使用的OLED显示驱动器,特别适用于需要高分辨率、低功耗和快速响应时间的应用
【Modbus TCP协议深度剖析】:汇川H5U高效实现指南
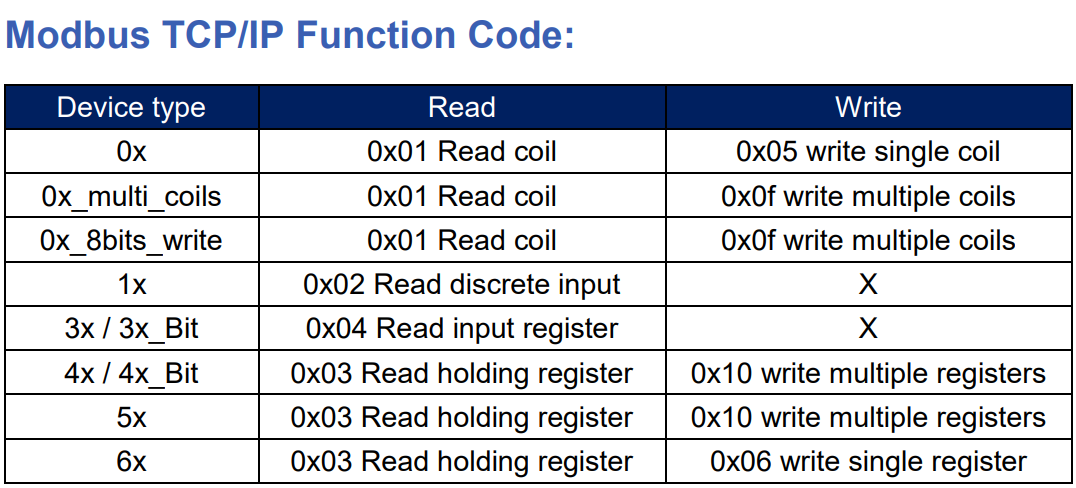
参考资源链接:[汇川H5U系列控制器Modbus通讯协议详解](https://wenku.csdn.net/doc/4bnw6asnhs?spm=1055.2635.3001.10343)
# 1. Modbus TCP协议概述
Modbus TCP协议是一种广泛应用于工业自动化领域的通信协议,它是Modbus协议的
VoNR性能革命:信令优化策略的7大关键步骤

参考资源链接:[5G VoNR信令流程详解与语音业务实施](https://wenku.csdn.net/doc/62a0bacs03?spm=1055.2635.3001.10343)
# 1. VoNR技术背景及信令概述
## 1.1 VoNR技术的发展和重要性
【TFT-OLED显示问题根源】:像素单元故障诊断与解决方案
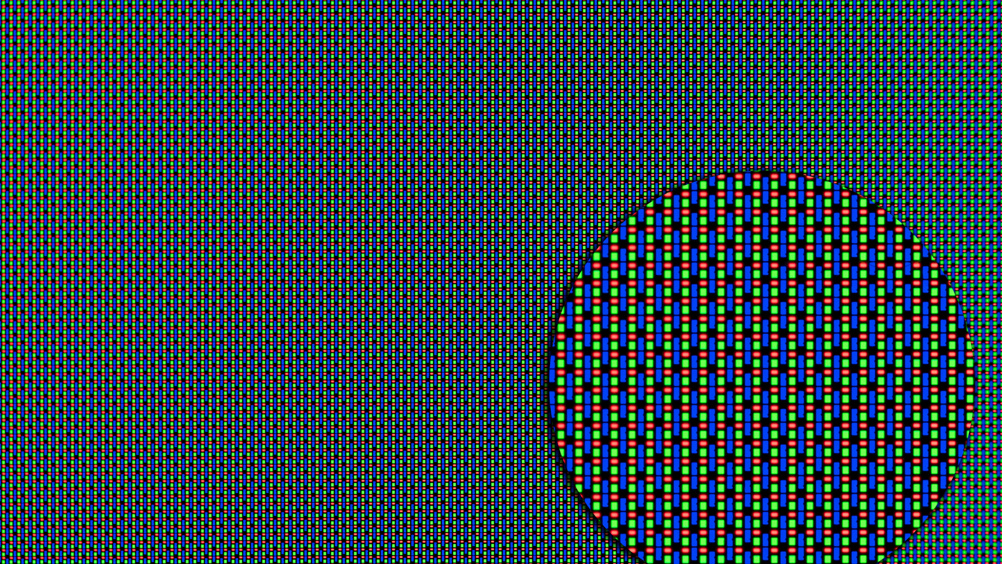
参考资源链接:[TFT-OLED像素单元与驱动电路:新型显示技术的关键](https://wenku.csdn.net/doc/645e5453543f8444888953bc?spm=105
海康综合安防平台1.7权限管理精讲:构建企业级安全防线

参考资源链接:[海康威视iSecureCenter综合安防平台1.7配置指南](https://wenku.csdn.net/doc/3a4qz526oj?spm=1055.2635.3001.10343)
# 1. 海康综合安防平
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )