【VL53L1XToF传感器终极指南】:解锁性能潜力,从基础到高级应用
发布时间: 2025-01-04 04:11:42 阅读量: 5 订阅数: 11 
# 摘要
本文对VL53L1X ToF(Time of Flight)传感器进行了全面介绍和分析,涵盖了从理论基础到应用实践的各个方面。首先,文中概述了ToF技术原理及其优势,并与传统测距技术进行了比较。随后,探讨了VL53L1X传感器的工作模式、分辨率配置和距离限制。在硬件连接与配置章节中,详细说明了传感器与微控制器的接口、驱动安装和软件初始化流程,以及实时数据获取和处理方法。在应用实践部分,阐述了该传感器在空间定位、避障系统、机器人自动化控制和消费电子产品中的应用案例。最后,高级应用与性能优化章节讨论了多传感器数据融合、信号处理和噪声消除技术,以及系统性能调优和故障诊断的方法。通过本文,读者将获得对VL53L1X ToF传感器深入的理解和掌握。
# 关键字
ToF传感器;VL53L1X;空间定位;避障系统;信号处理;性能优化
参考资源链接:[VL53L1X长距离测距传感器API详细指南](https://wenku.csdn.net/doc/64604e5f5928463033ad8320?spm=1055.2635.3001.10343)
# 1. VL53L1X ToF传感器简介
## 1.1 什么是VL53L1X
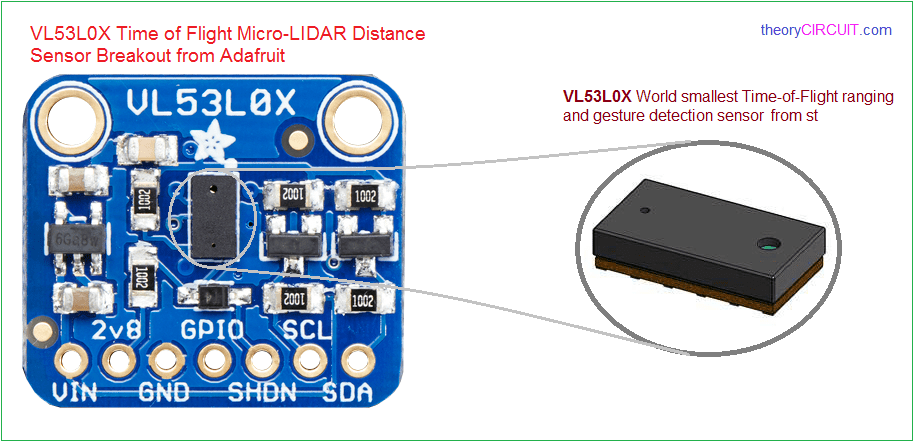
VL53L1X是一个集成在微型封装中的单点激光测距传感器,它采用VGA-SPAD阵列接收器与直接时间飞行(ToF)技术,能够实现高精度、快速的距离测量。通过使用脉冲激光测距而非光学测距,VL53L1X ToF传感器能够在任何光照条件下提供稳定的性能表现。
## 1.2 应用领域
它广泛应用于消费电子、移动设备、机器人和工业自动化,以及其他需要精确距离测量和接近检测的场合。由于其体积小、易于集成和低功耗的特点,VL53L1X成为设计人员在实现这些功能时的首选。
## 1.3 传感器特点
VL53L1X传感器是STMicroelectronics公司生产的产品,它不仅提供高精度的测量距离,而且具有智能的I2C接口和可配置的中断功能。此外,它具备更好的抗光干扰能力,这使它能够在多种光照环境下稳定工作,从而适应多种应用场合。
通过以上介绍,我们将对VL53L1X ToF传感器有一个基本的了解。接下来,我们将详细探讨VL53L1X ToF传感器的理论基础,并深入了解其工作原理。
# 2. VL53L1X ToF传感器的理论基础
### 2.1 ToF技术原理与优势
#### 时间飞行测距技术概述
时间飞行(Time of Flight, ToF)技术是一种利用光速计算距离的测量方法。其基本原理是通过测量光波从发射到被目标反射回来所需的时间,进而推算出光波传播的距离。ToF传感器发射一束脉冲光,该光束在遇到物体后反射回来,传感器则计算光束往返的时间。由于光速是已知的,通过时间乘以光速即可得到距离。
这种技术具有几个优势:一是测量速度快,可以达到毫秒级甚至更短的响应时间;二是精度高,尤其是在短距离测量时;三是可以无视物体的材质和颜色,因为ToF传感器测量的是时间,而光速是恒定的。
#### ToF与传统测距技术比较
传统的测距技术通常包括光学测距和超声波测距。光学测距依赖于相机和图像处理技术,可以获取高精度的数据,但成本较高,处理速度慢,且受环境光照的影响较大。超声波测距成本低、响应速度快,但其精度受到声速变化和环境因素的影响,且对一些材料的反射率不敏感。
相较之下,ToF传感器具有以下优势:
- 快速响应:ToF传感器可以在微秒级别内完成一次测量,适用于需要快速响应的应用。
- 高精度:在近距离内,ToF传感器可以实现毫米级的测量精度。
- 不受环境影响:ToF传感器对于光线和声音环境不敏感,适合多种复杂环境。
- 成本效益:相较于复杂的光学测距系统,ToF传感器以其成本效益好而受到青睐。
### 2.2 VL53L1X传感器的工作模式
#### 标准测距模式
VL53L1X ToF传感器的标准测距模式适用于大多数通用测量应用。在这种模式下,传感器会发送一定数量的光脉冲并接收其反射信号,计算往返时间来确定距离。标准模式下,传感器的灵敏度和分辨率可以调节,以适应不同的测量范围和环境条件。
默认参数下,VL53L1X传感器可以在0.1米到2米的范围内进行测量,而无需额外的光学透镜。通过调整传感器的发射脉冲数量和灵敏度,用户可以优化测量的稳定性和精度,以适应不同的应用场景。
#### 高精度和高速模式
除了标准模式外,VL53L1X还提供高精度和高速两种模式,各有其特定的应用场景。
高精度模式通过增加发射的光脉冲数量来提升距离测量的精度,适用于需要极高精度测量的应用,例如机器人导航或精密自动化控制。这种模式下的数据采集时间会增加,导致响应时间相对较慢。
高速模式则着重于提升传感器的响应速度,通过减少发射的光脉冲数量来实现快速测量。这使得传感器能够在极短的时间内完成多次测量,适用于对响应时间要求极高的应用,如快速运动物体的检测和跟踪。
### 2.3 测量分辨率与距离限制
#### 分辨率配置对测量的影响
VL53L1X ToF传感器提供了灵活的分辨率配置选项,允许用户根据需要调整测量的精度和速度。通过编程设置不同的分辨率级别,传感器可以在不同的测量范围内优化其性能。
分辨率越高,传感器可以区分的最小距离变化就越小,理论上可以获得更高的测量精度。但是,增加分辨率通常会牺牲一些测量速度。反之,降低分辨率可以提高测量速度,但测量的精度会有所下降。
在实际应用中,需要根据具体的使用场景来平衡分辨率和测量速度的需求。例如,在需要快速响应的应用中,可能需要选择较低的分辨率以获得更快的测量周期,而在需要极高精度的应用中,则可能需要使用更高的分辨率配置。
#### 实际环境下的距离限制因素
虽然VL53L1X ToF传感器可以在0.1米到2米范围内工作,但在实际应用中,其性能可能会受到多种因素的影响,从而限制其测量范围。
光线条件是一个重要因素,强光或逆光可能会导致传感器接收不到足够的反射信号,造成测量失败。此外,目标物体的反射率也会影响测量结果,暗色或透明材质的物体可能难以被准确测量。环境中的温度变化也会影响传感器的电子元件,导致测量精度波动。
在某些工业应用中,传感器可能需要配合外部光学透镜使用,以扩大或缩小测量范围,这要求用户根据实际应用场景来选择合适的透镜,并对传感器进行相应的配置调整。为了克服这些限制,设计者需要深入理解传感器的特性和应用环境,以确保测量结果的可靠性和准确性。
# 3. VL53L1X ToF传感器硬件连接与配置
在了解了VL53L1X ToF传感器的原理和优势后,接下来我们将深入探讨如何将VL53L1X传感器集成到实际的硬件系统中,实现其精确的距离测量功能。硬件连接与配置是实现这一目标的关键步骤,我们将从传感器与微控制器的接口开始,逐一介绍驱动安装、软件初始化,以及如何实时获取和处理测量数据。
## 3.1 传感器与微控制器的接口
### 3.1.1 I2C通信协议详解
VL53L1X传感器通过I2C通信协议与微控制器连接。I2C是一种多主机、多从机的串行通信总线,它允许主机设备(如微控制器)与多个从机设备(如传感器)进行数据交换。I2C总线使用两条线:一条是串行数据线(SDA),另一条是串行时钟线(SCL)。
- **主机设备**:通常是微控制器,负责生成时钟信号并启动数据传输过程。
- **从机设备**:在VL53L1X的情况下,是传感器设备。从机设备拥有一个唯一的地址,以便主机可以通过I2C总线识别和通信。
- **时钟信号**:由主机设备提供,用于同步数据的传输。
- **数据信号**:在时钟信号的上升沿和下降沿之间传输数据。
I2C协议支持不同速度模式,包括标准模式(100kbps)、快速模式(400kbps)和高速模式(3.4Mbps)。VL53L1X传感器支持标准模式和高速模式,根据应用需求选择合适的模式可以确保通信的稳定性和速度。
### 3.1.2 电路设计与连接指南
在设计电路板时,确保将VL53L1X的SCL和SDA引脚连接到微控制器对应的I2C引脚上,同时还需要将VL53L1X的GND和VDD引脚连接到微控制器的电源和地线上。通常还需要两个上拉电阻分别连接到SCL和SDA线上,以确保逻辑高电平的稳定性。
此外,VL53L1X传感器有一个GPIO引脚,可以用于中断请求(IRQ)信号。当设置为中断模式时,传感器完成一次测量后,会通过这个引脚向微控制器发送中断信号,通知微控制器读取测量结果。
在连接时要注意以下几点:
- 确保所用微控制器支持I2C通信协议。
- 根据微控制器的数据手册,选择正确的I2C引脚。
- 确保所有连接的引脚电平匹配(通常是3.3V或5V),否则需要使用电平转换器。
- 如果使用多个I2C设备,确保为每个设备分配了唯一的地址,并在微控制器上配置相应的I2C地址。
## 3.2 驱动安装与软件初始化
### 3.2.1 软件库的安装与配置
为了方便开发,可以使用现成的软件库来与VL53L1X传感器通信。例如,许多微控制器都有针对VL53L1X的专用库,如Arduino的VL53L1X库,或者Raspberry Pi的vl53l1x Python库。安装这些库通常只需要几条简单的命令:
```shell
pip install vl53l1x
```
或者,如果是使用Arduino IDE,可以通过库管理器进行安装。
安装好软件库后,就可以在软件中配置传感器参数了。通常需要指定I2C地址(如果设备地址未在出厂时设定,可以按住传感器上的引脚来改变地址),并初始化传感器对象:
```python
from vl53l1x import VL53L1X
# 创建VL53L1X对象
tof = VL53L1X(i2c_bus=1, i2c_address=0x29)
# 初始化传感器
tof.init()
```
### 3.2.2 初始化传感器与校准过程
传感器初始化后,还需要进行一些必要的校准步骤以确保测量结果的准确性。VL53L1X传感器在出厂时已经过校准,但应用环境的不同可能需要进行额外的校准。例如,在强光或温度变化大的环境中,可能需要重新校准。
一般校准流程包括:
1. 启动传感器并设置基本参数。
2. 让传感器在目标工作环境中运行一段时间,以稳定其内部温度。
3. 进行一次或多次测量,并将结果作为校准依据。
4. 更新传感器内部的校准参数。
```python
# 进行一次测量
distance = tof.read()
# 将测量结果用于校准过程(此处需要具体的校准算法)
calibration_value = ... # 通过算法得出校准值
tof.setCalibration(calibration_value)
```
进行校准后,传感器就能够提供更加精确的测量结果。
## 3.3 实时数据获取与处理
### 3.3.1 读取距离数据的方法
VL53L1X传感器能够提供毫米级的精确距离测量。为了获取实时数据,微控制器需要定期从传感器读取测量结果。这可以通过轮询(polling)或中断(interrupt)的方式来完成。
轮询方式是通过不断询问传感器是否有新的测量结果来获取数据:
```python
while True:
distance = tof.read()
print("Measured distance:", distance, "mm")
time.sleep(0.1) # 等待100ms再次测量
```
使用中断方式则更加高效。当传感器完成测量后,会通过IRQ引脚向微控制器发送信号,微控制器只需在中断服务程序中读取数据即可。
```python
def on_distance_ready():
distance = tof.read()
print("Measured distance:", distance, "mm")
tof.setup_interrupts(on_distance_ready)
```
### 3.3.2 数据过滤与优化处理
从传感器获取的数据可能包含噪声和不稳定性,因此需要进行过滤和优化处理。常用的方法有移动平均滤波、中值滤波和卡尔曼滤波等。
- **移动平均滤波**:通过对连续几次测量结果取平均值来平滑数据。
- **中值滤波**:通过对连续几次测量结果取中值来减少异常值的影响。
- **卡尔曼滤波**:一种自回归滤波方法,用于处理含有噪声的动态系统测量数据,能够提供最优估计。
```python
from statistics import median
def median_filter(data, window_size):
return [median(data[i:i + window_size]) for i in range(len(data) - window_size + 1)]
distance_readings = []
for i in range(100):
distance_readings.append(tof.read())
filtered_distances = median_filter(distance_readings, 5)
```
在使用滤波算法时,需要根据实际应用场景选择合适的窗口大小和算法。滤波后的数据更加适合后续的处理和分析。
在本章节中,我们详细探讨了VL53L1X ToF传感器的硬件连接与配置方法,包括I2C通信协议的解析、电路连接指南、驱动安装以及软件初始化步骤。此外,我们还介绍了实时数据获取和处理的方式,以及数据过滤和优化处理的技巧,以帮助开发者更好地集成和使用VL53L1X传感器。在下一章中,我们将深入探讨VL53L1X ToF传感器在各种应用中的实际应用和实践。
# 4. VL53L1X ToF传感器应用实践
## 4.1 空间定位与避障系统
### 4.1.1 空间映射与目标检测
随着自动化技术的发展,空间定位与避障系统在无人驾驶汽车、机器人导航、智能家居等领域扮演着越来越重要的角色。VL53L1X ToF传感器以其高精度和快速响应特性,在这些领域得到了广泛应用。空间映射和目标检测是这些系统的基本要求。
使用VL53L1X传感器进行空间映射时,需要将多个传感器均匀分布于设备的四周,以实现全方位的深度信息感知。每个传感器在特定的时间间隔内,执行一次测距操作,记录周围环境的距离数据。收集到的数据通过算法处理,能够构建出空间的三维映射,为后续的目标检测提供基础数据。
为了提高目标检测的准确性,可以采取以下措施:
- 实现多传感器数据同步,以获得一致的时间戳信息,确保数据在同一时刻采集。
- 采用适当的数据融合算法,将多个传感器的数据综合分析,消除因单点故障或者环境因素造成的偏差。
- 进行目标特征提取,通过对比历史数据与实时数据,识别出移动物体或静态障碍物。
一个重要的技术细节在于,为了提高系统的鲁棒性,需要对算法进行持续的优化和测试。例如,动态阈值的应用可以显著提高对移动物体的检测准确率,尤其在光照条件变化较大的环境下。
```mermaid
graph LR
A[开始空间映射] --> B[初始化多个VL53L1X传感器]
B --> C[同步采集距离数据]
C --> D[数据预处理和校准]
D --> E[构建初步的空间深度图]
E --> F[应用数据融合算法]
F --> G[识别移动物体和障碍物]
G --> H[空间映射完成]
```
### 4.1.2 自动避障实现与案例分析
自动避障功能的实现是基于空间映射和目标检测的基础之上的。自动避障系统要求设备能够根据环境数据,实时计算出安全的行驶路径,以避免碰撞。为了达到这一目标,VL53L1X ToF传感器需要不断地提供准确的距离信息。
在此基础上,可以使用路径规划算法如A*、RRT*或者基于传感器数据的动态窗口法等,根据实时获取的深度信息和已知的地图信息,实时调整设备的运动轨迹,确保安全通过复杂环境。
例如,在一个车间自动化机器人项目中,通过在机器人四周安装VL53L1X传感器,机器人能够检测到工作区域内的人和其他障碍物,并计算出避开障碍物的最短路径,确保在执行任务的同时,避免与人或其他机器人发生碰撞。
在避障过程中,实时性是一个关键指标。VL53L1X传感器以高频率采集数据(例如每秒数次到数十次),并通过DMA(直接内存访问)或中断机制实时处理数据。这样能够大大降低延迟,提高避障效率。
```mermaid
graph LR
A[开始自动避障流程] --> B[初始化传感器和路径规划算法]
B --> C[实时采集环境数据]
C --> D[进行目标检测和空间映射]
D --> E[路径规划与轨迹生成]
E --> F[执行避障动作]
F --> G[避障流程完成]
```
### 4.1.3 消费电子产品的创新应用
在消费电子产品领域,VL53L1X ToF传感器同样能够发挥其独特的性能优势,为产品的创新提供支持。一种比较前沿的应用是在智能手机中集成VL53L1X传感器,以实现多样的用户交互功能。
例如,在智能手机中,可以通过VL53L1X实现接近感应和手势控制功能。用户无需实际触碰屏幕,而是通过简单的手势动作,来控制手机进行拍照、切换歌曲或调节音量等操作。这不仅为用户带来新的交互体验,也降低了屏幕磨损和指纹污染。
实现这一功能需要结合手机的软件系统,通过深度学习算法对传感器捕获的深度数据进行解析,以识别用户的特定手势。这项技术的关键在于算法的准确性,它需要能够区分各种细微的手势动作,同时对环境光线变化具有一定的适应性。
另一个值得关注的创新应用是在增强现实(AR)游戏中。在AR应用中,VL53L1X传感器能够提供空间环境的深度信息,使游戏中的虚拟物体能够更自然地与真实环境融合,增强用户的沉浸感。
总之,随着技术的进步,VL53L1X ToF传感器在消费电子产品中的应用潜力是巨大的,未来可能会有更多令人兴奋的功能被开发出来。
# 5. VL53L1X ToF传感器高级应用与性能优化
## 5.1 多传感器数据融合与同步
### 5.1.1 数据融合技术基础
在使用多个VL53L1X ToF传感器的复杂应用中,数据融合技术是关键。数据融合可以分为多个层次,包括原始数据层、特征层和决策层融合。原始数据层融合直接在传感器数据层面进行,是最基础也是最直接的融合方式。通过综合多个传感器的数据,可以获得更为丰富和准确的信息。
数据融合不仅需要考虑空间上的信息整合,还要考虑时间上的同步。时间同步确保了来自不同传感器的数据是在同一时刻获取的,这对于动态环境中的快速响应尤其重要。例如,在机器人导航系统中,多传感器数据的融合可以提高定位的精度和可靠性。
### 5.1.2 多传感器同步测量策略
同步多个VL53L1X传感器,首先需要一个共同的时钟源,这可以通过使用微控制器的定时器或者外部的时钟信号来实现。各个传感器可以配置为不同的I2C地址,使得微控制器可以独立地与它们通信。
具体实现时,可以采用以下步骤:
1. 初始化所有VL53L1X传感器,确保它们处于就绪状态。
2. 微控制器通过编程向所有传感器发送统一的测量开始指令。
3. 所有传感器同时开始测量。
4. 微控制器等待所有传感器完成测量。
5. 从每个传感器中依次读取测量结果,并进行后续的数据处理。
这一过程需要精确的时序控制,可以使用微控制器的中断或者轮询机制来确保操作的同步性。
```c
// 伪代码示例:同步启动多个VL53L1X传感器测量
void startSynchronizedMeasurements(VL53L1Xsensor *sensorArray, int sensorCount) {
for (int i = 0; i < sensorCount; ++i) {
sensorArray[i].startMeasurement();
}
for (int i = 0; i < sensorCount; ++i) {
sensorArray[i].waitForMeasurementReady();
int distance = sensorArray[i].readMeasurement();
processMeasurement(distance);
}
}
```
数据融合与同步可以显著提升多传感器系统的性能,为复杂应用提供了强大的支持。
## 5.2 信号处理与噪声消除技术
### 5.2.1 先进的信号处理算法
在VL53L1X ToF传感器的应用中,信号处理算法对于提高测量的准确性至关重要。算法的选择取决于应用的具体需求,如动态范围、响应时间和抗干扰能力。
一种常用的信号处理技术是卡尔曼滤波器,它能够在存在测量噪声的情况下,提供对物理量的估计。卡尔曼滤波器在处理传感器数据时,能够根据模型预测下一时刻的物理量,并通过实际测量值对预测值进行校正。
此外,自适应滤波器和小波变换等方法也常被用于信号去噪和特征提取。这些方法能够适应信号的统计特性,从而在不同的工作环境下提供鲁棒的性能。
### 5.2.2 噪声来源与消除方法
噪声是影响VL53L1X传感器性能的主要因素之一。噪声的来源包括环境光干扰、传感器内部电路噪声以及信号传输过程中的电磁干扰等。
为了消除噪声,可以采取以下措施:
1. 在硬件层面,使用滤光片减少环境光的干扰,设计屏蔽良好的电路和连接线减少电磁干扰。
2. 在软件层面,应用低通滤波器、中值滤波器等数字信号处理技术来降低随机噪声的影响。
3. 实时调整传感器参数,比如改变测量积分时间,以适应不同强度的环境光条件。
通过上述措施,可以在一定程度上减少噪声的干扰,提高测量数据的质量。
## 5.3 系统性能调优与故障诊断
### 5.3.1 性能监测与优化工具
为了对VL53L1X ToF传感器系统的性能进行监测与优化,可以使用专门的工具和接口。这些工具可能包括数据记录和分析软件,它们能够监控系统运行状态,记录关键参数,并提供性能报告。
性能优化的过程通常包括:
1. 持续监控传感器的测量频率、响应时间和测量准确度。
2. 使用统计方法分析测量数据,识别出可能的异常值或者系统性偏差。
3. 根据分析结果调整传感器设置,如测量分辨率、灵敏度、测量范围等。
4. 测试调整后的系统性能,验证优化是否有效。
### 5.3.2 常见故障诊断与解决方案
在VL53L1X ToF传感器使用过程中,可能会遇到多种故障,常见故障包括测量失灵、数据不稳定和硬件损坏等。故障诊断是系统维护的重要环节,正确的诊断方法有助于快速定位问题,并采取相应的解决方案。
以下是一些常见故障及诊断方法:
- 测量失灵:检查传感器是否正确初始化,以及是否被正确地放置在测量场景中。
- 数据不稳定:分析数据波动的模式,可能是由于环境噪声或信号处理不当造成的。可以尝试调整滤波器参数或者增强信号强度。
- 硬件损坏:使用硬件诊断工具检查传感器的电气连接和微控制器的通信状态。
每种故障都需要详细的诊断过程和相应的解决策略,以确保系统稳定运行。在开发阶段,应该建立完善的故障预防和应对机制,以提高系统的鲁棒性。
```mermaid
graph TD
A[启动故障诊断流程] --> B[检查传感器初始化状态]
B -->|初始化成功| C[检查传感器位置和方向]
B -->|初始化失败| D[检查I2C通信状态]
C -->|位置正确| E[分析数据稳定性]
C -->|位置错误| F[调整传感器位置]
D -->|通信正常| G[检查环境噪声和信号处理]
D -->|通信错误| H[检查硬件连接]
E -->|数据稳定| I[系统运行正常]
E -->|数据波动| J[调整滤波器参数]
G -->|低噪声| K[检查传感器灵敏度和测量范围]
G -->|高噪声| L[尝试增强信号或减少噪声]
J --> M[测试优化后的性能]
L -->|优化有效| M
L -->|优化无效| N[更换传感器或优化硬件布局]
M -->|性能提升| I
M -->|性能未提升| O[重新评估故障原因]
N -->|问题解决| I
O --> A
```
通过持续的性能监测和优化,可以确保VL53L1X ToF传感器系统在各种应用场合中发挥出最佳的性能。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以 VL53L1X ToF 传感器为中心,提供全面的中文用户手册,涵盖从基础到高级应用的方方面面。文章内容包括硬件连接、配置要点、故障排除、校准技巧、编程接口解析、高级编程应用、数据处理技术、环境因素分析、同步测量技术、自动驾驶和无人机应用、工业自动化中的精确控制、节能策略、机器视觉应用、传感器网络构建、软件开发工具包指南和通信协议深度解析。通过深入浅出的讲解和丰富的案例分析,专栏旨在帮助用户充分发挥 VL53L1X 传感器的性能潜力,实现高精度空间定位、避障、精确控制和机器视觉等应用。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【单片机电路构建技巧】:稳定高效电路设计的关键5要点
# 摘要
本文综述了单片机电路设计的关键环节,从电路组件的选择到布局技巧,再到编程与外围设备控制,最终论述电路测试与性能优化的方法。在第二章中,详述了电阻、电容、电感等基本电子元件的功能与选用原则,以及半导体器件和传感器在单片机电路中的应用。第三章则深入讨论了PCB设计基础、高频电路布线和多层PCB设计的特殊考虑。第四章关注于单片机编程和外围设备控制,包括编程语言、接口技术及调试技巧。最后,第五章探讨了电
【专家如何优化】:南京远驱控制器参数调优,操作建议与行业最佳实践
# 摘要
本文针对南京远驱控制器参数调优进行了系统性的研究和阐述。首先介绍了控制理论的基础知识以及参数调优的基本方法,随后结合实际案例分析了控制器调优前后的性能对比。在实践指南章节中,文章提供了详细的硬件设置、参数配置及软件工具使用等操作建议,并强调了调优流程中的目标确定和评估改进。此外,本文还分享了不同行业的最佳实践,探讨了进阶调优技巧,并对智能化和技术发展的未来趋势进行了预测。最后,提出了控制器操作和维护的建议,帮助延长控制器的使用寿命,并对参数调优的未来方向进行了展望。
# 关键字
控制理论;参数调优;硬件配置;软件工具;性能评估;最佳实践;智能化技术;控制器维护
参考资源链接:[南
ABB机器人指令精通秘籍:一文解析所有必备指令
# 摘要
本文对ABB机器人指令体系进行了全面概述,涵盖了基础和高级指令的解析及应用。首先介绍了ABB机器人指令体系的基本结构和常见指令类型。随后,对基本指令进行了深入解析,包括移动指令、I/O控制指令和逻辑控制指令及其在实际应用中的作用。高级指令应用部分,则着重探讨了数据处理、任务管理和错误处理与诊断指令的技巧和优化。此外,文章提
TriggIO指令调试秘籍:ABB机器人维护与故障排除技巧(维护与故障处理)

# 摘要
本文全面介绍了ABB机器人的基础架构及其独特的TriggIO指令集,详细阐述了其控制逻辑、故障诊断理论,并提供了实践维护和故障排除的具体步骤。文中不仅深入分析了自动化维护工具和故障预测策略,还探讨了系统性能优化与升级的方法。案例研究部分展示了在实际场景中如何应用所学知识进行故障排除,以
MT7688 GPIO编程实战指南:点亮LED的正确方式
# 摘要
本文对MT7688芯片的GPIO(通用输入输出)编程进行了全面的探讨,涵盖了基础概念、硬件与软件理论、实践操作、高级技巧以及问题排查与调试。首先介绍了GPIO的硬件结构及在MT7688中的应用,然后详细阐述了软件编程模型和库函数。实践部分演示了如何通过编程点亮LED灯,包括硬件连接和代码实现。在高级编程技巧章节,讨论了中断处理和多线程编程。最后,文章探讨了GPIO编
【互耦效应全面解读】:深入挖掘流型相关性的秘密与应对策略
# 摘要
互耦效应是影响多个系统或元件相互作用的重要现象,其理论模型和计算方法对理解和预测复杂系统的行为至关重要。本文首先介绍了互耦效应的基础概念和理论模型,阐述了其在工程实践中的应用及对系统稳定性的影响,探讨了设计参数的选择和调整以及监测技术的发展。接着,本文提供了应对互耦效应的策略,包括预防措施、设计标准和应急响应,并通过案例分析验证了这些措施的有效性。最后,本文展望了互耦效应研究的未来方向,分析了技术创新带来的机遇与挑战。整体而言,本文为理解互耦效应提供了全面的视角,并为相关领域的研究与实践提供了理论和实际操作的指导。
# 关键字
互耦效应;理论模型;计算方法;系统稳定性;监测技术;应
【MATLAB字符串处理精进课】:24小时速成秘籍,专家级字符串操作全面解析
# 摘要
MATLAB作为一种高效的数值计算和可视化工具,其强大的字符串处理能力在数据分析、文本挖掘等领域中发挥着重要作用。本文首先概述了MATLAB字符串处理的基础知识,随后介绍了基础操作如创建、赋值、基本函数操作以及正则表达式的使用。在此基础上,文章深入探讨了MATLAB高级字符串处理技术,包括格式化字符串、复杂字符串分析处理方法和文本挖掘应用。此外,本文通过实践案
【数据管理黄金法则】:确保InfoWorks ICM数据质量的五大策略

# 摘要
InfoWorks ICM作为一款先进的综合城市模型软件,其数据管理的有效性直接关系到模型的准确性和实用性。本文介绍了InfoWorks ICM的基本概念及其数据管理的重要性,探讨了确保数据准确性的策略,包括数据录入标准的制定和实时校验机制。同时,本文还详细阐述了实现数据完整性的多种方法,如一致性检查和数据备份策略,以
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )