STM32单片机与上位机通信协议栈分析:从底层协议到应用层协议,深入理解通信协议
发布时间: 2024-07-03 00:00:30 阅读量: 5 订阅数: 11 

# 1. 通信协议概述
通信协议是计算机系统之间交换信息的一种规则或标准。它定义了数据格式、传输方式和错误处理机制,确保不同设备之间能够有效通信。通信协议可分为底层协议和应用层协议两大类。
底层协议负责数据在物理层和数据链路层的传输,包括串口通信协议、以太网通信协议等。应用层协议则负责应用程序之间的数据交换,如 Modbus 协议、MQTT 协议、HTTP 协议等。
# 2. 底层协议
### 2.1 串口通信协议
串口通信协议是一种使用串行通信方式进行数据传输的协议。它通常用于短距离通信,例如连接计算机和外围设备。串口通信协议有多种标准,包括 RS-232、RS-485 和 CAN 总线。
#### 2.1.1 RS-232 标准
RS-232 标准是一种异步串行通信协议,用于在两个设备之间传输数据。它使用一对双绞线,一条用于发送数据,另一条用于接收数据。RS-232 标准支持全双工通信,这意味着两个设备可以同时发送和接收数据。
**参数说明:**
- 波特率:数据传输速率,单位为比特/秒。
- 数据位:每个字符传输的数据位数,通常为 7 或 8 位。
- 停止位:字符传输结束后发送的停止位数,通常为 1 或 2 位。
- 奇偶校验:用于检测数据传输错误的校验方法,可以是无校验、奇校验或偶校验。
**代码块:**
```c
#include <stdio.h>
#include <stdlib.h>
#include <termios.h>
int main() {
int fd;
struct termios options;
// 打开串口设备
fd = open("/dev/ttyS0", O_RDWR | O_NOCTTY);
if (fd == -1) {
perror("open");
exit(EXIT_FAILURE);
}
// 设置串口参数
tcgetattr(fd, &options);
options.c_cflag = B9600 | CS8 | CLOCAL | CREAD;
options.c_iflag = IGNPAR | ICRNL;
options.c_oflag = 0;
options.c_lflag = 0;
tcsetattr(fd, TCSANOW, &options);
// 发送数据
write(fd, "Hello, world!", 13);
// 接收数据
char buffer[1024];
int n = read(fd, buffer, sizeof(buffer));
if (n > 0) {
printf("Received: %s\n", buffer);
}
// 关闭串口设备
close(fd);
return 0;
}
```
**逻辑分析:**
这段代码演示了如何使用 RS-232 标准在 Linux 系统上进行串口通信。它打开串口设备,设置串口参数,发送数据,接收数据,然后关闭串口设备。
#### 2.1.2 RS-485 标准
RS-485 标准是一种半双工串行通信协议,用于在多台设备之间传输数据。它使用一对双绞线,所有设备共享这两条线。RS-485 标准支持多主模式,这意味着多个设备可以同时充当主设备。
**参数说明:**
- 波特率:数据传输速率,单位为比特/秒。
- 数据位:每个字符传输的数据位数,通常为 7 或 8 位。
- 停止位:字符传输结束后发送的停止位数,通常为 1 或 2 位。
- 奇偶校验:用于检测数据传输错误的校验方法,可以是无校验、奇校验或偶校验。
- 驱动模式:设备在总线上的驱动模式,可以是半双工或全双工。
**代码块:**
```c
#include <stdio.h>
#include <stdlib.h>
#include <termios.h>
int main() {
int fd;
struct termios options;
// 打开串口设备
fd = open("/dev/ttyS0", O_RDWR | O_NOCTTY);
if (fd == -1) {
perror("open");
exit(EXIT_FAILURE);
}
// 设置串口参数
tcgetattr(fd, &options);
options.c_cflag = B9600 | CS8 | CLOCAL | CREAD;
options.c_iflag = IGNPAR | ICRNL;
options.c_oflag = 0;
options.c_lflag = 0;
options.c_cc[VMIN] = 1;
options.c_cc[VTIME] = 0;
tcsetattr(fd, TCSANOW, &options);
// 发送数据
write(fd, "Hello, world!", 13);
// 接收数据
char buffer[1024];
int n = read(fd, buffer, sizeof(buffer));
if (n > 0) {
printf("Received: %s\n", buffer);
}
// 关闭串口设备
close(fd);
return 0;
}
```
**逻辑分析:**
这段代码演示了如何使用 RS-485 标准在 Linux 系统上进行串口通信。它打开串口设备,设置串口参数,发送数据,接收数据,然后关闭串口设备。
#### 2.1.3 CAN 总线协议
CAN 总线协议是一种串行通信协议,用于在汽车和工业自动化系统中传输数据。它使用双绞线或光纤作为传输介质,支持多主模式。CAN 总线协议具有高可靠性、高实时性和低成本的特点。
**参数说明:**
- 波特率:数据传输速率,单位为比特/秒。
- 数据位:每个字符传输的数据位数,通常为 8 位。
- 停止位:字符传输结束后发送的停止位数,通常为 1 位。
- 奇偶校验:用于检测数据传输错误的校验方法,通常使用 CRC 校验。
- 报文格式:CAN 总线协议报文格式分为标准帧和扩展帧两种。
**代码块:**
```c
#include <stdio.h>
#include <stdlib.h>
#include <linux/can.h>
#include <linux/can/raw.h>
int main() {
int fd;
struct sockaddr_can addr;
s
```
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 STM32 单片机与上位机之间的通信技术,旨在帮助工程师打造高效、稳定且安全的通信系统。从通信指南到故障排查,从协议分析到性能测试,专栏全面覆盖了通信的各个方面。此外,还提供了实用的优化策略、案例解析和技术选型建议,帮助工程师解决实际问题。通过对硬件设计、软件开发、系统集成和高级技术的深入讲解,专栏为工程师提供了全面的知识和实践指导,使他们能够掌握 STM32 单片机与上位机通信的精髓,并设计和构建可靠、高效的通信系统。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
稀疏矩阵在增强现实中的应用:融合现实与虚拟,创造全新体验
# 1. 稀疏矩阵简介
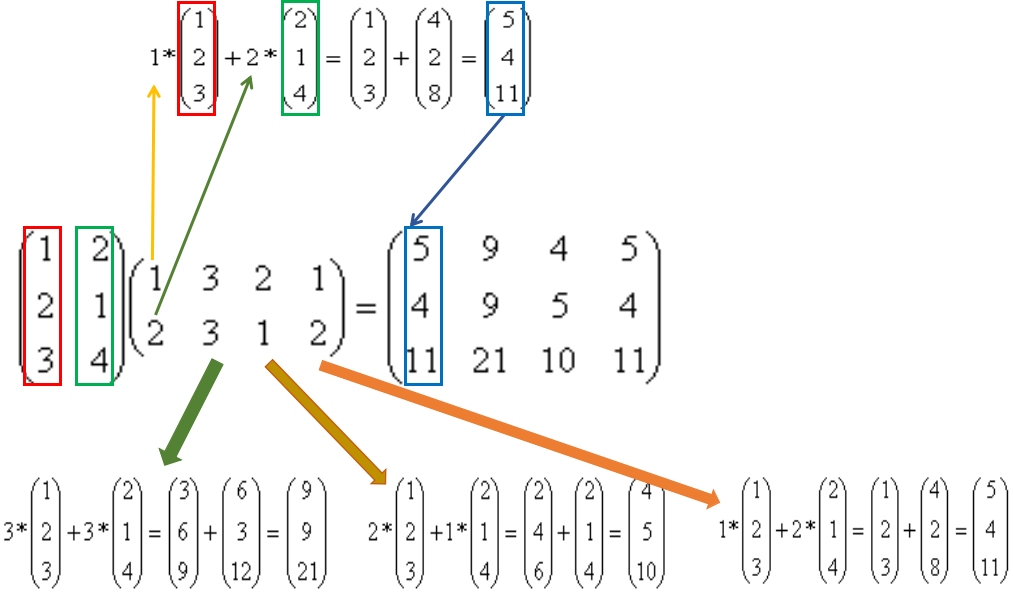
稀疏矩阵是一种特殊类型的矩阵,其元素大部分为零。在增强现实(AR)中,稀疏矩阵被广泛用于表示场景几何结构、运动轨迹等数据。
稀疏矩阵的存储格式主要有坐标存储格式和行索引存储格式。坐标存储格式直接存储非零元素的坐标和值,而行索引存储格式则存储每个非零元素的行索引和值。稀疏矩阵的运算主要包括加减法和乘法,其中乘法运算需要考虑稀疏性特点进行优化。
# 2. 稀疏矩阵在增强现实中的理论基础
### 2.1 稀疏矩阵的表示和存储
稀疏矩阵是一种特殊类型的矩阵,其中大
STM32单片机与工业自动化:深入分析其在工业自动化领域的应用

# 1. STM32单片机的基础理论
### 1.1 STM32单片机概述
STM32单片机是意法半导体(STMicroelectronics)公司推出的一系列基于ARM Cortex-M内核的32位微控制器。它以其高性能、低功耗和丰富的外设而闻名,广泛应用于工业自动化、物联网、医疗设备和消费电子等领域。
### 1.2 STM32单片机架构
STM32单片机采用哈佛架构,具有独立的指令存储器和数据存储器。其
构建智慧能源管理体系:电池管理系统与智能电网集成
# 1. 智慧能源管理体系概述**
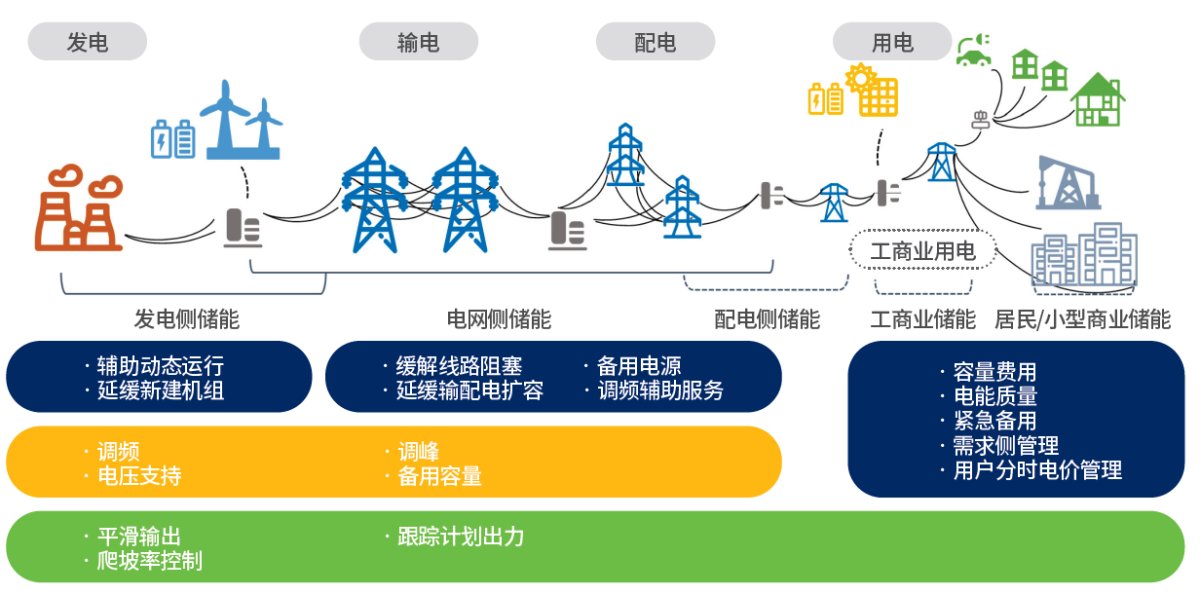
智慧能源管理体系是一种利用先进信息技术和通信技术,对能源生产、传输、分配、利用和存储等环节进行综合管理和优化的系统。其核心目标是提高能源利用效率,降低能源成本,并促进可再生能源的利用。
智慧能源管理体系由多个子系统组成,包括智能电网、电池管理系统、分布式能源系统、能源管理系统和用户侧管理系统。其中,智能电网是能源传输和分配的基础设施,电池管理系统是可再生能源存储和管理的关键技术,分布式能源系统是清洁
特征向量在量子计算中的应用,探索数据分析的新疆域

# 1. 量子计算概述
量子计算是一种利用量子力学原理进行计算的新型计算范式。与传统计算机不同,量子计算机利用量子比特(qubit)来存储和处理信息。量子比特可以同时处于 0 和 1 的叠加态,这使得量子计算机能够以指数级的方式处理某些类型的计算问题。
量子计算的潜在应用非常广泛,包括:
* 材料科学:设计新材料和药物
* 金融:优化投资组合和风险管
STM32单片机步进电机控制电机控制中的自适应控制:实现电机自适应调节,提升控制性能

# 1. 步进电机控制基础**
步进电机是一种将电脉冲信号转换成角位移或线位移的执行器。其工作原理是将电脉冲
STM32单片机嵌入式开发汽车电子与自动驾驶应用:开启智能驾驶
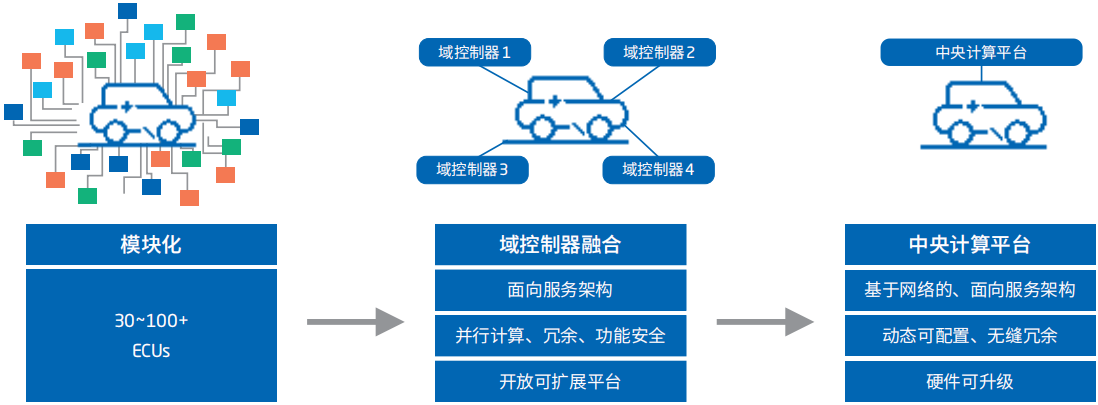
# 1. STM32单片机嵌入式开发基础
STM32单片机是意法半导体公司推出的32位微控制器系列,具有高性能、低功耗、丰富的片上外设等特点,广泛应用于嵌入式系统开发。本节将介绍STM32单片机的基本架构、主要特性和开发环境搭建。
### 1.1 STM32单片机架构
STM32单片机采用ARM Cortex-M内核,具有32位RISC指令集,主频范围从几十MHz到几百MHz。其内部
模式识别:增强现实技术,从原理到应用

# 1. 增强现实技术的原理
增强现实(AR)是一种将数字信息叠加到现实世界中的技术,创造出一种增强现实体验。它通过使用摄像头、传感器和显示器,将虚拟对象与物理环境融合在一起。
AR技术的原理基于计算机视觉和图像处理技术。摄像头捕获现实世界的图像,然后由软件分析图像并识别关键特征。这些特征用于跟踪用户的位置和方向,并根据这些信息将虚拟对象放置在正确的位置。
虚拟对象可以是各种形式,
meshgrid函数在科学计算中的重要性:偏微分方程求解的利器

# 1. 偏微分方程求解概述**
偏微分方程(PDE)在科学和工程领域广泛应用,描述了物理系统中变量随空间和时间变化的规律。求解偏微分方程通常需要将其离散化为代数方程组,而网格生成是离散化的关键步骤。
网格生成将连续的求解域离散为有限个网格点,形成一个网格结构。网格的质量直接影响离散化方程的精度和求解效率。meshgrid函数是一
STM32单片机复位电路故障诊断与故障排除指南:快速定位问题,高效解决故障
# 1. STM32单片机复位电路概述**
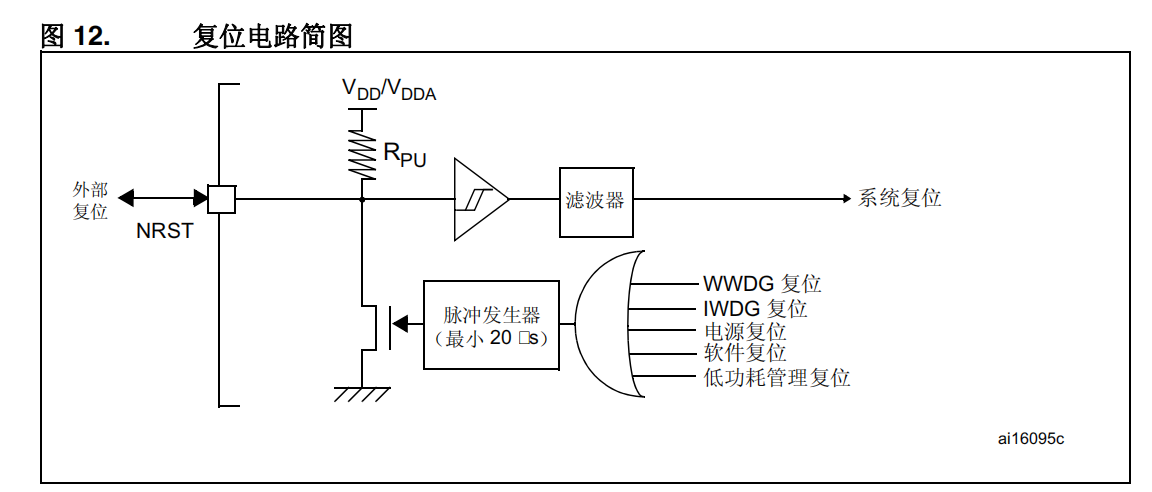
STM32单片机的复位电路负责在各种情况下将单片机复位到已知状态。复位电路通常由外部复位信号、内部复位电路和复位状态指示器组成。
外部复位信号可以来自外部按钮、看门狗定时器或其他外部设备。内部复位电路包括上电复位、掉电复位、软件复位和故障复位。复位状态指示器通常是复位引脚,它指示单片机是否处于复位状态。
# 2
STM32单片机与物联网:连接设备,构建物联网解决方案,迈向智能未来
# 1. STM32单片机简介**
STM32单片机是由意法半导体(STMicroelectronics)开发的一系列32位微控制器(MCU)。这些MCU基于ARM Cortex-M内核,以其高性能、低功耗和广泛的应用范围而闻名。
STM32单片机具有广泛的型号选择,从入门级的STM32F0系列到高性能的STM32H7系列。它们提供各种存储器选项、外设和连接功
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )