MATLAB时域分析:【模型验证与仿真】,控制系统的实践研究
发布时间: 2024-11-15 17:05:03 阅读量: 47 订阅数: 37 

基于Matlab/Simulink 的二阶控制系统仿真研究
# 1. MATLAB时域分析基础
## 1.1 MATLAB软件简介
MATLAB是MathWorks公司开发的一套高性能数值计算与可视化软件,广泛应用于工程计算、数据分析、算法开发等领域。作为一款强大的数学计算平台,MATLAB提供了一个高级语言环境,使得工程师和科研人员能通过简洁的代码实现复杂的数学运算,其交互式的开发环境,让代码的调试和运行更加便捷高效。
## 1.2 时域分析的重要性
在控制系统的设计与分析中,时域分析是一种直观展现系统动态性能的方法。时域分析通过观察系统输出随时间变化的过程,可以清晰地识别系统瞬态和稳态的特性。MATLAB时域分析的工具箱提供了一组函数和模型,用于创建和分析控制系统的时间响应,是评估控制性能不可或缺的工具。
## 1.3 初识MATLAB时域分析函数
例如,MATLAB中的`step()`函数可以用来获取系统的阶跃响应,这对于判断系统是否稳定以及是否满足时间域的性能指标至关重要。一个基本的阶跃响应分析代码如下:
```matlab
sys = tf(1, [1, 3, 2]); % 创建一个传递函数模型
step(sys); % 绘制阶跃响应
grid on; % 显示网格
title('阶跃响应分析'); % 添加标题
```
在这段代码中,我们首先创建了一个传递函数模型`sys`,然后使用`step()`函数绘制出其阶跃响应,并通过`grid on`和`title()`函数增强了图形的可读性。
通过上述简单示例,我们能够感受到MATLAB在时域分析中的应用之便捷。在后续章节中,我们将深入学习如何利用MATLAB进行更复杂的控制系统的时域分析。
# 2. 控制系统模型的建立与验证
## 2.1 控制系统理论概述
### 2.1.1 控制系统的基本组成
控制系统是由相互关联且相互作用的各个部分组成的,旨在实现对一个或多个受控对象的精确控制。一个基本的控制系统通常由五个核心元素构成:控制对象(Plant)、传感器(Sensor)、执行器(Actuator)、控制器(Controller)和比较器(Comparator)。
- **控制对象**是需要被控制的系统,如电机、温度系统等,它将控制器的输出信号转换成相应的物理变化。
- **传感器**用于感知和测量控制对象的状态,如温度、速度或位置等,并将这些信息以电信号的形式反馈给控制器。
- **执行器**按照控制器的命令动作,它可以是一个电动机、加热器或其他形式的机械或电气设备。
- **控制器**根据控制目标,依据比较器的反馈信息进行决策,输出控制命令。
- **比较器**将传感器收集的反馈信号和期望的设定值进行比较,产生偏差信号供控制器使用。
### 2.1.2 控制系统的主要类型
根据系统的响应方式和结构特征,控制系统可以分为多种类型,每种类型有不同的特点和适用场景。
- **按控制方式分类**,可以分为开环控制和闭环控制。
- **开环控制系统**不依赖于被控制量的反馈,其输出只依赖于输入信号。例如,程序控制的自动化装配线。
- **闭环控制系统**(也称为反馈控制系统)根据被控制量的反馈来调整控制量,常见的例子有家用恒温器。
- **按系统特性分类**,可以分为线性系统和非线性系统。
- **线性系统**遵循叠加原理和比例原理,输出与输入呈线性关系。
- **非线性系统**的输出与输入不呈线性关系,此类系统更复杂,常见的非线性现象包括饱和、死区和死锁。
## 2.2 控制系统的数学建模
### 2.2.1 线性系统与非线性系统的建模方法
数学建模是控制系统分析和设计的基础。对于线性系统,常用的建模方法是利用拉普拉斯变换从系统的微分方程出发,导出系统的传递函数。对于非线性系统,建模通常更加复杂,需要采用描述函数、相平面法或者数值仿真等方法。
- **线性系统的建模**:
以一个简单的RC电路为例,其微分方程可以表示为`RC * (dVc/dt) + Vc = Vr(t)`。应用拉普拉斯变换,得到传递函数`H(s) = Vc(s)/Vr(s) = 1/(RCs + 1)`。
- **非线性系统的建模**:
以一个简单的弹簧-质量-阻尼系统为例,如果弹簧的力与位移不是线性关系,则系统是非线性的。此时可以使用泰勒展开近似处理或利用数值方法求解系统方程。
### 2.2.2 系统传递函数和状态空间模型
系统可以用多种数学模型来描述,其中传递函数和状态空间模型是两种最常见的表示方法。
- **传递函数模型**是一个输入-输出模型,表示为输出信号与输入信号之间的比率,形式上是一个多项式的比值。它仅适用于线性时不变系统。
- **状态空间模型**表示为一组一阶微分方程,它不仅适用于线性系统,还能描述非线性系统,并且可以方便地进行数值仿真和控制系统设计。状态空间模型由状态方程和输出方程组成:
- 状态方程:`dx/dt = Ax + Bu`
- 输出方程:`y = Cx + Du`
其中,`x`为状态变量,`u`为输入变量,`y`为输出变量,`A`、`B`、`C`、`D`为系统矩阵。
## 2.3 模型验证方法
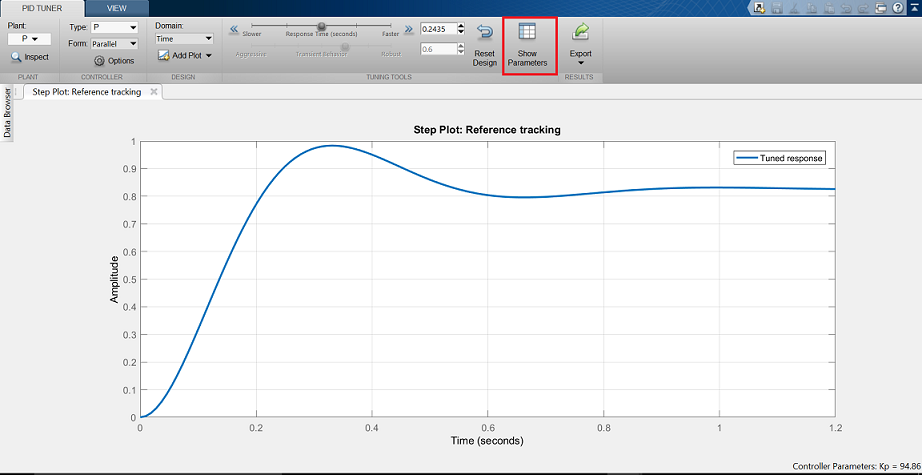
### 2.3.1 系统响应分析
系统响应分析是验证系统模型正确性的重要步骤,它包括对系统施加特定输入后的输出响应进行检测。根据响应的特性,可以判断系统的稳定性、快速性和准确性等性能指标。常见的输入激励有阶跃响应、冲击响应和正弦响应。
- **阶跃响应**:阶跃响应是最常用的验证手段,能够直观地展示系统从初始状态到稳态的过渡过程。通过观察阶跃响应曲线,可以评估系统的上升时间、峰值时间和稳态误差等性能指标。
- **冲击响应**:冲击响应(冲激响应)展示了系统对高频变化输入信号的响应。通过冲击响应,可以分析系统的频率特性。
- **正弦响应**:正弦响应提供了系统在正弦输入下的响应信息,通过它可以评估系统在不同频率下的性能。
### 2.3.2 稳定性检验与性能指标
稳定性是控制系统设计中的首要目标,一个稳定的系统应该在受到扰动后能够自我恢复到平衡状态。检验系统稳定性的一种常见方法是通过其传递函数的极点来判断。如果所有极点都位于复平面的左半部,则系统稳定。
性能指标则用于评价系统的动态和静态性能,包括:
- **上升时间**:输出从初始状态到达最终稳态值的指定百分比(如90%)所需的时间。
- **峰值时间**:达到第一个峰值的时间。
- **超调量**:输出超过最终稳态值的最大量。
- **稳态误差**:长期稳定后输出与期望值之间的差异。
- **阻尼比**和**自然频率**:用于描述系统振荡的特性。
在MATLAB中,可以使用`step()`、`impulse()`和`bode()`等函数来分析系统模型的响应特性。
接下来的章节将继续深入探讨MATLAB在控制系统仿真中的具体应用,包括MATLAB Simulink的使用,以及如何通过仿真工具对控制系统进行参数优化和性能评估。
# 3. MATLAB仿真工具应用
## 3.1 MATLAB Simulink基础
### 3.1.1 Simulink环境介绍
Simulink是MATL

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以 MATLAB 为平台,深入探讨控制系统时域分析的方方面面。从基础概念到高级技巧,涵盖了控制工程的各个关键领域。专栏标题包含以下主题:
* 系统稳定性与瞬态响应
* 系统性能评估与参数调优
* 线性和非线性控制系统分析
* 模型验证与仿真
* 系统辨识与参数估计
* 控制器设计与系统稳定性
* 高级仿真与故障诊断
* 控制系统鲁棒性分析与设计
* 模型预测控制
* 自适应控制与学习算法
* 多变量控制系统
* 最优控制理论与实践
* 信号处理在控制系统中的应用
* 动态系统建模与分析
通过深入浅出的讲解、丰富的示例和代码实现,本专栏旨在为控制工程师、研究人员和学生提供全面而实用的时域分析知识和技能。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
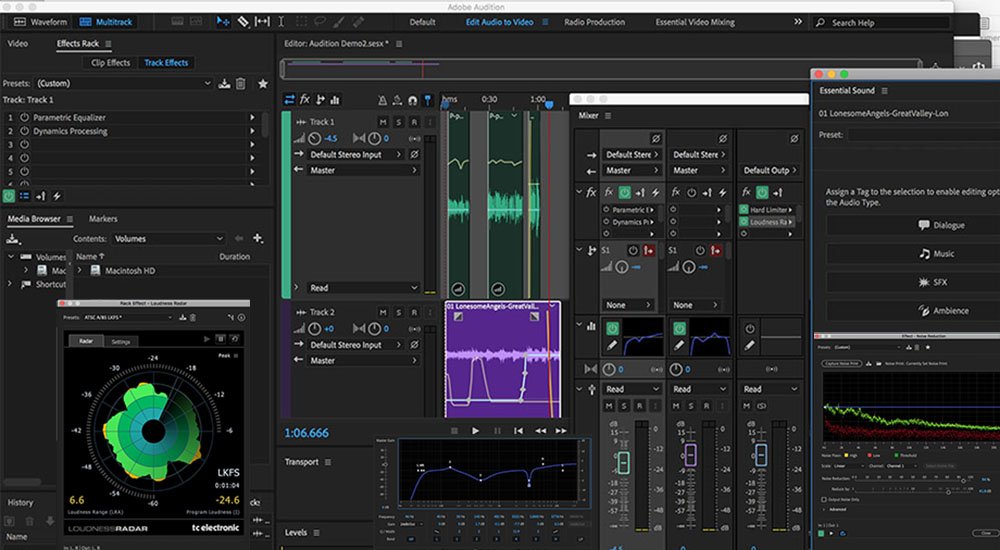
音频分析无界限:Sonic Visualiser与其他软件的对比及选择指南
参考资源链接:[Sonic Visualiser新手指南:详尽功能解析与实用技巧](https://wenku.csdn.net/doc/r1addgbr7h?spm=1055.2635.3001.10343)
# 1. 音频分析软件概述与Sonic Visualiser简介
## 1.1 音频分析软件的作用
音频分析软件在数字音频处理领域扮演着至关重要的角色。它们不仅为
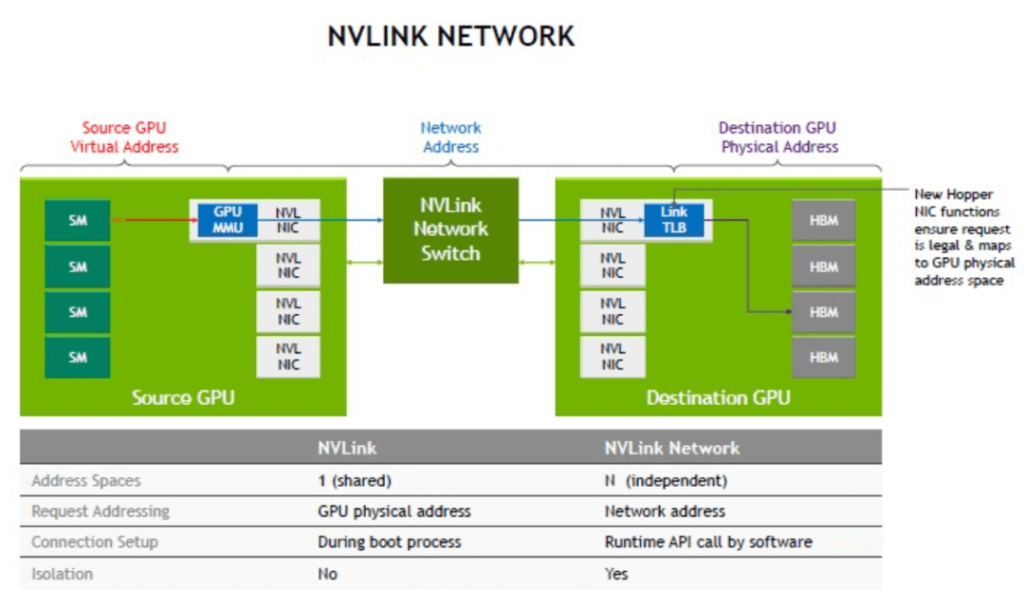
多GPU协同新纪元:NVIDIA Ampere架构的最佳实践与案例研究
参考资源链接:[NVIDIA Ampere架构白皮书:A100 Tensor Core GPU详解与优势](https://wenku.csdn.net/doc/1viyeruo73?spm=1055.2635.3001.10343)
# 1. NVIDIA Ampere架构概览
在本章中,我们将深入探究NVIDIA Ampere架构的核心特
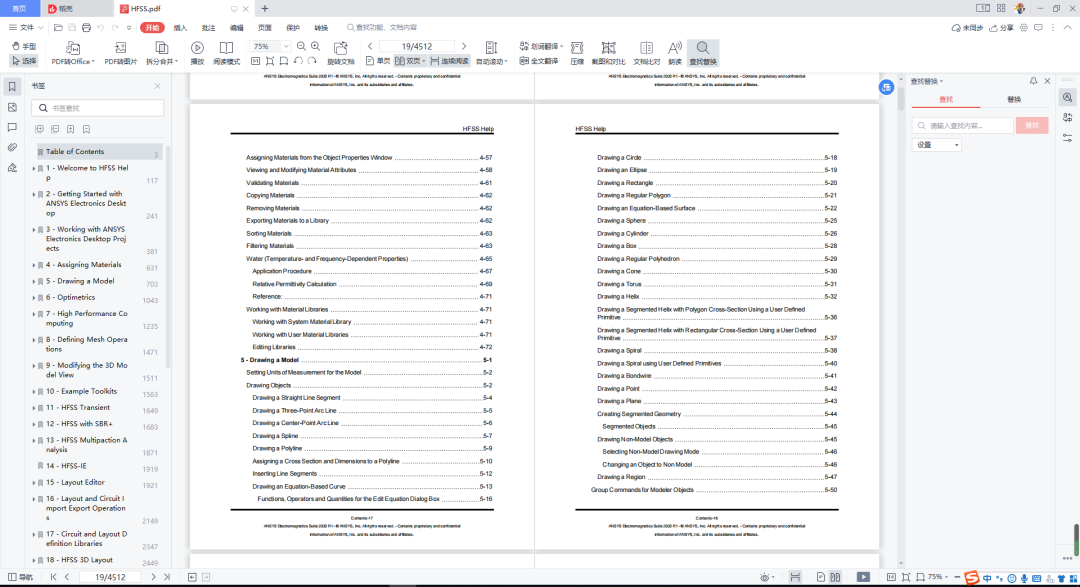
【HFSS栅球建模终极指南】:一步到位掌握建模到仿真优化的全流程
参考资源链接:[2015年ANSYS HFSS BGA封装建模教程:3D仿真与分析](https://wenku.csdn.net/doc/840stuyum7?spm=1055.2635.3001.10343)
# 1. HFSS栅球建模入门
## 1.1 栅球建模的必要性与应用
在现代电子设计中,准确模拟电磁场的行为至关重要,特别是在高频应用领域。栅
【MediaKit的跨平台摄像头调用】:实现一次编码,全平台运行的秘诀

参考资源链接:[WPF使用MediaKit调用摄像头](https://wenku.csdn.net/doc/647d456b543f84448829bbfc?spm=1055.2635.3001.10343)
# 1. MediaKit跨
【机器学习优化高频CTA策略入门】:掌握数据预处理、回测与风险管理
参考资源链接:[基于机器学习的高频CTA策略研究:模型构建与策略回测](https://wenku.csdn.net/doc/4ej0nwiyra?spm=1055.2635.3001.10343)
# 1. 机器学习与高频CTA策略概述
## 机器学习与高频交易的交叉
在金融领域,尤其是高频交易(CTA)策略中,机器学习技术已成为一种创新力量,它使交易者能够从历史数据中发现复杂的模
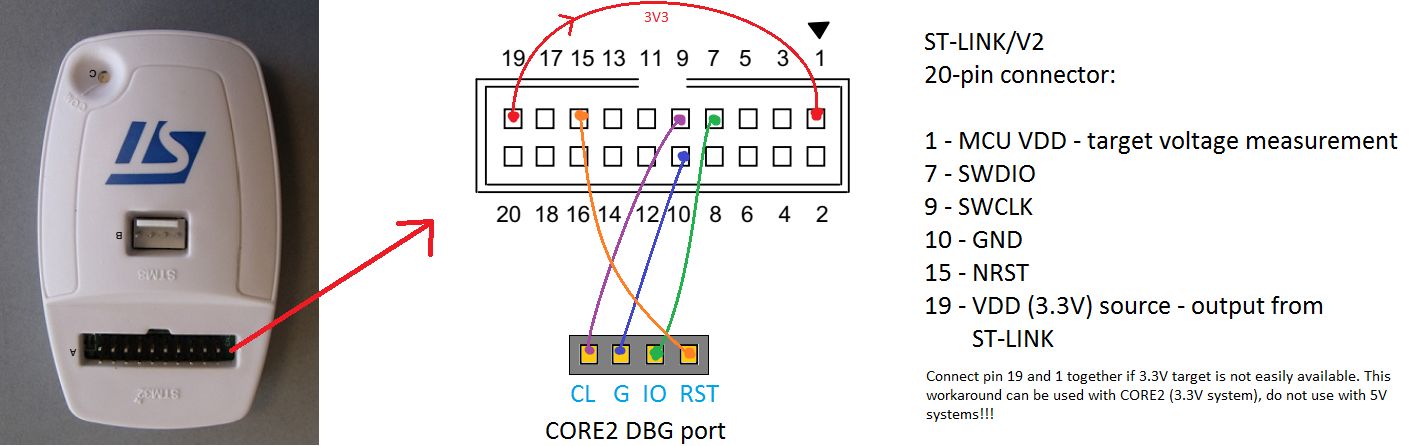
ST-Link V2 原理图解读:从入门到精通的6大技巧
参考资源链接:[STLink V2原理图详解:构建STM32调试下载器](https://wenku.csdn.net/doc/646c5fd5d12cbe7ec3e52906?spm=1055.2635.3001.10343)
# 1. ST-Link V2简介与基础应用
ST-Link V2是一种广泛使用的调试器/编
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )