MATLAB建模与仿真指南:探索系统行为和预测结果
发布时间: 2024-06-15 16:28:51 阅读量: 72 订阅数: 37 

MATLAB编程与系统仿真

# 1. MATLAB建模与仿真简介
MATLAB是一种强大的技术计算语言,广泛用于建模和仿真复杂系统。通过MATLAB,工程师和科学家可以创建虚拟模型来探索系统行为,预测结果并优化设计。
MATLAB建模涉及将真实世界的系统表示为数学方程和算法。这些方程和算法使用MATLAB语言实现,创建可执行的模型。仿真是运行这些模型以观察系统在不同条件下的行为。通过仿真,工程师可以分析系统性能、识别问题并探索改进方案。
MATLAB提供了一套全面的工具和库,用于建模和仿真各种系统,包括物理、生物和经济系统。这些工具包括Simulink,一个用于基于块的建模和仿真的图形化环境,以及Stateflow,一个用于状态机建模和仿真的工具。
# 2. MATLAB建模基础
### 2.1 MATLAB数据类型和变量
MATLAB中的数据类型定义了数据的存储方式和表示方式。常见的MATLAB数据类型包括:
#### 2.1.1 数值类型
- **整数类型:**int8、int16、int32、int64
- **浮点类型:**single、double
- **复数类型:**complex
#### 2.1.2 字符串类型
字符串类型用于存储文本数据,可以使用单引号或双引号表示。
#### 2.1.3 逻辑类型
逻辑类型表示真或假,使用`true`和`false`表示。
### 2.2 MATLAB运算符和表达式
MATLAB提供了一系列运算符用于执行算术、关系和逻辑运算。
#### 2.2.1 算术运算符
| 运算符 | 描述 |
|---|---|
| + | 加法 |
| - | 减法 |
| * | 乘法 |
| / | 除法 |
| ^ | 幂运算 |
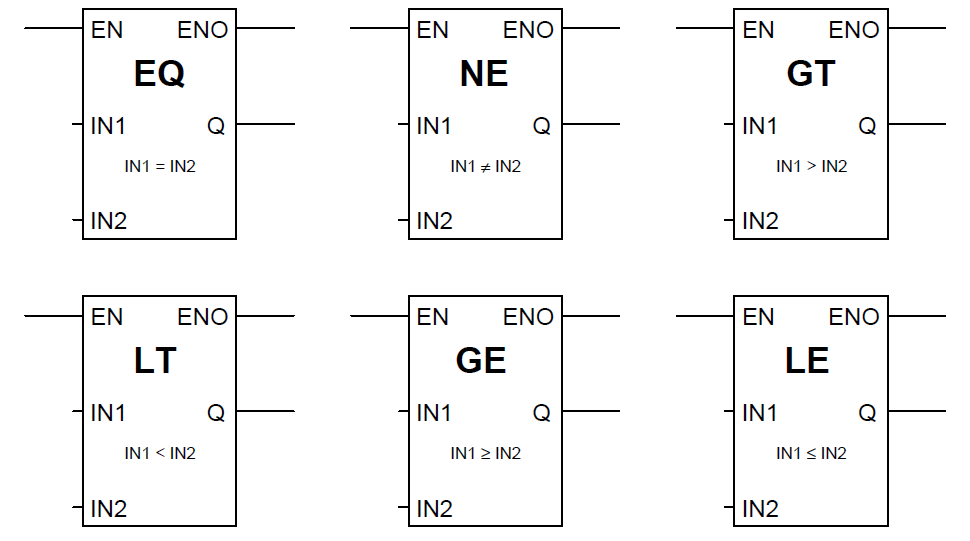
#### 2.2.2 关系运算符
| 运算符 | 描述 |
|---|---|
| == | 等于 |
| ~= | 不等于 |
| < | 小于 |
| > | 大于 |
| <= | 小于等于 |
| >= | 大于等于 |
#### 2.2.3 逻辑运算符
| 运算符 | 描述 |
|---|---|
| & | 与运算 |
| | | 或运算 |
| ~ | 非运算 |
**代码块:**
```matlab
% 数值类型
a = 10; % 整数
b = 3.14; % 浮点数
c = 1 + 2i; % 复数
% 字符串类型
str = 'Hello MATLAB';
% 逻辑类型
flag = true;
```
**逻辑分析:**
这段代码演示了不同数据类型的声明和使用。`a`是一个整数,`b`是一个浮点数,`c`是一个复数,`str`是一个字符串,`flag`是一个逻辑值。
# 3. MATLAB仿真技术**
**3.1 Simulink建模**
**3.1.1 Simulink工作原理**
Simulink是MATLAB中用于模型化和仿真动态系统的图形化环境。它使用块状图来表示系统,其中每个块代表系统中的一个特定组件或功能。Simulink使用基于事件的仿真引擎,该引擎根据预定义的时间步长执行模型。当模型中的状态或输入发生变化时,Simulink会重新计算模型并更新输出。
**3.1.2 Simulink模块库**
Simulink提供了一个广泛的模块库,包括:
* **连续模块:**用于模拟连续时间系统,例如积分器、微分器和传递函数。
* **离散模块:**用于模拟离散时间系统,例如延迟、采样器和数字滤波器。
* **非线性模块:**用于模拟非线性系统,例如饱和度、滞后和继电器。
* **用户自定义模块:**允许用户创建自己的模块来扩展Simulink的功能。
**3.1.3 Simulink仿真流程**
Simulink仿真流程包括以下步骤:
1. **创建模型:**使用Simulink模块库构建模型的块状图。
2. **设置仿真参数:**指定仿真时间、步长和其他仿真设置。
3. **运行仿真:**Simulink引擎执行模型并计算输出。
4. **分析结果:**使用Simulink的绘图工具和分析功能分析仿真结果。
**3.2 Stateflow建模**
**3.2.1 Stateflow工作原理**
Stateflow是MATLAB中用于建模和仿真状态机和事件驱动的系统的图形化环境。它使用状态机图来表示系统,其中状态表示系统的不同状态,而转换表示状态之间的转换。Stateflow使用事件驱动的仿真引擎,该引擎根据发生的事件触发状态转换。
**3.2.2 Stateflow状态机图**
Stateflow状态机图由以下元素组成:
* **状态:**表示系统的不同状态。
* **转换:**表示状态之间的转换,并指定触发转换的事件。
* **动作:**在转换发生时执行的动作。
* **数据:**与状态机关联的数据,可用于控制状态转换和动作。
**3.2.3 Stateflow事件处理**
Stateflow支持多种事件处理机制,包括:
* **事件:**外部或内部事件,触发状态转换。
* **触发器:**指定事件发生时触发转换的条件。
* **动作:**在转换发生时执行的动作。
* **守卫:**在转换发生之前检查的条件。
**代码示例:**
```
% 创建一个简单的Simulink模型
simulink
% 添加一个积分器块
add_block('simulink/Continuous/Integrator', 'myIntegrator');
% 设置积分器增益
set_param('myIntegrator', 'Gain', 1);
% 设置仿真时间
sim_time = 10;
% 运行仿真
sim('myModel', sim_time);
% 获取仿真结果
y = get_param('myModel', 'yout');
% 绘制仿真结果
plot(y);
```
**逻辑分析:**
这段代码创建一个简单的Simulink模型,其中包含一个积分器块。它设置积分器增益、仿真时间并运行仿真。然后,它获取仿真结果并绘制结果图。
# 4. MATLAB建模与仿真实践**
**4.1 系统建模**
系统建模是将真实世界系统抽象为数学模型的过程。MATLAB提供了强大的工具来创建各种系统的模型,包括:
**4.1.1 物理系统建模**
物理系统建模涉及到将物理定律和原理转化为数学方程。MATLAB中的Simulink模块库提供了广泛的模块,可用于构建机械、电气和流体动力系统模型。
**代码块:**
```
% 创建一个简单的弹簧-质量-阻尼器系统模型
m = 1; % 质量(千克)
k = 100; % 弹簧刚度(牛顿/米)
b = 10; % 阻尼系数(牛顿秒/米)
% 创建 Simulink 模型
model = simulink.Model('spring_mass_damper');
% 添加模块
add_block('simulink/Sources/Step', model, 'Position', [100, 100]);
add_block('simulink/Continuous/Transfer Fcn', model, 'Position', [250, 100]);
add_block('simulink/Sinks/Scope', model, 'Position', [400, 100]);
% 设置模块参数
set_param('spring_mass_damper/Step', 'Time', '0');
set_param('spring_mass_damper/Step', 'Amplitude', '1');
set_param('spring_mass_damper/Transfer Fcn', 'Numerator', '[1]');
set_param('spring_mass_damper/Transfer Fcn', 'Denominator', '[m k+b]');
% 仿真模型
sim('spring_mass_damper');
% 绘制结果
plot(model.get('tout'), model.get('yout'));
xlabel('时间(秒)');
ylabel('位移(米)');
```
**逻辑分析:**
* 第 2-4 行定义了系统参数:质量、弹簧刚度和阻尼系数。
* 第 7-11 行创建了一个 Simulink 模型,并添加了阶跃输入、传递函数和示波器模块。
* 第 12-15 行设置了模块参数,包括阶跃输入的时间和幅度,以及传递函数的分子和分母。
* 第 17 行仿真了模型。
* 第 19-22 行绘制了仿真结果,显示了位移随时间的变化。
**4.1.2 生物系统建模**
生物系统建模涉及到模拟生物过程和机制。MATLAB中的Stateflow模块库提供了创建状态机图和事件处理模型的工具,非常适合建模生物系统中的复杂行为。
**代码块:**
```
% 创建一个简单的捕食者-猎物模型
predator_population = 100; % 捕食者数量
prey_population = 1000; % 猎物数量
% 创建 Stateflow 模型
model = stateflow.Model('predator_prey');
% 添加状态机图
add_stateflow_chart(model, 'predator_prey_chart');
% 添加状态
add_state(model, 'predator_prey_chart', 'Predator_Hungry');
add_state(model, 'predator_prey_chart', 'Predator_Eating');
add_state(model, 'predator_prey_chart', 'Prey_Growing');
add_state(model, 'predator_prey_chart', 'Prey_Dying');
% 添加转换
add_transition(model, 'predator_prey_chart', 'Predator_Hungry', 'Predator_Eating', 'Prey_Population > 0');
add_transition(model, 'predator_prey_chart', 'Predator_Eating', 'Predator_Hungry', 'Predator_Population > 100');
add_transition(model, 'predator_prey_chart', 'Prey_Growing', 'Prey_Dying', 'Prey_Population > 1000');
add_transition(model, 'predator_prey_chart', 'Prey_Dying', 'Prey_Growing', 'Predator_Population < 10');
% 仿真模型
sim('predator_prey');
% 绘制结果
plot(model.get('tout'), model.get('yout'));
xlabel('时间(代)');
ylabel('种群数量');
```
**逻辑分析:**
* 第 2-4 行定义了系统参数:捕食者数量和猎物数量。
* 第 7-11 行创建了一个 Stateflow 模型,并添加了一个状态机图。
* 第 12-15 行添加了四个状态:捕食者饥饿、捕食者进食、猎物生长和猎物死亡。
* 第 16-23 行添加了四个转换,定义了状态之间的切换条件。
* 第 25 行仿真了模型。
* 第 27-30 行绘制了仿真结果,显示了捕食者和猎物数量随时间的变化。
**4.1.3 经济系统建模**
经济系统建模涉及到模拟经济活动和相互作用。MATLAB中的Econometrics Toolbox 提供了用于经济数据分析和建模的函数和工具。
**代码块:**
```
% 加载经济数据
data = load('economic_data.mat');
% 创建 VAR 模型
model = varm(data.gdp, data.inflation, data.interest_rate, 4);
% 预测未来值
forecast = forecast(model, 12);
% 绘制预测结果
plot(data.gdp, 'b');
hold on;
plot(forecast.gdp, 'r');
xlabel('时间(季度)');
ylabel('GDP(亿美元)');
legend('实际 GDP', '预测 GDP');
```
**逻辑分析:**
* 第 2 行加载了经济数据,包括 GDP、通货膨胀和利率。
* 第 4 行创建了一个向量自回归 (VAR) 模型,使用过去 4 个季度的值预测未来值。
* 第 6 行预测了未来 12 个季度的值。
* 第 8-13 行绘制了实际 GDP 和预测 GDP,并显示了它们之间的差异。
# 5. MATLAB建模与仿真应用
MATLAB建模与仿真在工程、科学和工业领域有着广泛的应用,它可以帮助工程师和研究人员设计、分析和优化复杂系统。
### 5.1 控制系统设计
MATLAB在控制系统设计中发挥着至关重要的作用。它提供了一系列工具和函数,用于设计和仿真各种类型的控制器,例如:
#### 5.1.1 PID控制器设计
PID(比例-积分-微分)控制器是一种广泛使用的反馈控制器,用于调节系统的输出以匹配所需的参考值。在MATLAB中,可以使用`pidtune`函数设计PID控制器。该函数需要系统的传递函数或状态空间模型作为输入,并返回PID控制器的增益参数。
```
% 定义系统的传递函数
G = tf([1], [1, 2, 1]);
% 使用pidtune函数设计PID控制器
C = pidtune(G, 'PID');
% 获取PID控制器的增益参数
Kp = C.Kp;
Ki = C.Ki;
Kd = C.Kd;
```
#### 5.1.2 状态反馈控制器设计
状态反馈控制器是一种高级控制技术,用于通过直接操纵系统的状态变量来控制系统行为。在MATLAB中,可以使用`lqr`函数设计状态反馈控制器。该函数需要系统的状态空间模型和权重矩阵作为输入,并返回状态反馈增益矩阵。
```
% 定义系统的状态空间模型
A = [0, 1; -1, -2];
B = [0; 1];
C = [1, 0];
D = 0;
% 定义权重矩阵
Q = [1, 0; 0, 1];
R = 1;
% 使用lqr函数设计状态反馈控制器
K = lqr(A, B, Q, R);
```
### 5.2 信号处理
MATLAB在信号处理领域也得到了广泛的应用。它提供了一系列工具和函数,用于处理和分析各种类型的信号,例如:
#### 5.2.1 滤波器设计
滤波器是一种处理信号以去除不需要的频率分量的设备。在MATLAB中,可以使用`filter`函数设计和应用各种类型的滤波器,例如:
```
% 定义滤波器参数
order = 5;
cutoff_freq = 100;
% 使用filter函数设计低通滤波器
b = fir1(order, cutoff_freq / (fs/2));
a = 1;
% 应用滤波器
filtered_signal = filter(b, a, signal);
```
#### 5.2.2 图像处理
MATLAB还提供了强大的图像处理功能。它提供了一系列工具和函数,用于处理和分析图像,例如:
```
% 读取图像
image = imread('image.jpg');
% 转换图像为灰度图像
gray_image = rgb2gray(image);
% 应用高斯滤波器以平滑图像
smoothed_image = imgaussfilt(gray_image, 2);
% 显示处理后的图像
imshow(smoothed_image);
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《MATLAB编程语言》专栏是一个全面的指南,涵盖了MATLAB编程的各个方面,从入门基础到高级技术。它提供了循序渐进的教程,涵盖了数据类型、运算、矩阵操作、函数、脚本、绘图、可视化、文件输入/输出、数据分析、建模、仿真、优化算法、图像处理、信号处理、金融建模、性能优化、调试、内存管理、并行编程、图形用户界面设计、与其他语言集成以及在科学计算和工程设计中的应用。本专栏旨在帮助初学者掌握MATLAB编程,并为经验丰富的用户提供深入的知识和最佳实践,以提高他们的MATLAB技能。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【掌握电路表决逻辑】:裁判表决电路设计与分析的全攻略
# 摘要
本文对电路表决逻辑进行了全面的概述,包括基础理论、设计实践、分析与测试以及高级应用等方面。首先介绍了表决逻辑的基本概念、逻辑门和布尔代数基础,然后详细探讨了表决电路的真值表和功能表达。在设计实践章节中,讨论了二输入和多输入表决电路的设计流程与实例,并提出了优化与改进方法。分析与测试
C# WinForm程序打包优化术:5个技巧轻松减小安装包体积
# 摘要
WinForm程序打包是软件分发的重要步骤,优化打包流程可以显著提升安装包的性能和用户体验。本文首先介绍了WinForm程序打包的基础知识,随后详细探讨了优化打包流程的策略,包括依赖项分析、程序集和资源文件的精简,以及配置优化选项。接着深入到代码级别,阐述了如何通过精简代码、优化数据处理和调整运行时环境来进一步增强应用程序。文章还提供了第三方打包工具的选择和实际案例分析,用以解决打包过程中的常见问题。最后,本
【NI_Vision调试技巧】:效率倍增的调试和优化方法,专家级指南
# 摘要
本文全面介绍了NI_Vision在视觉应用中的调试技术、实践案例和优化策略。首先阐述了NI_Vision的基础调试方法,进而深入探讨了高级调试技术,包括图像采集与处理、调试工具的使用和性能监控。通过工业视觉系统调试和视觉测量与检测应用的案例分析,展示了NI_Vision在实际问题解决中的应用。本文还详细讨论了代码、系统集成、用户界面等方面的优化方法,以及工具
深入理解Windows内存管理:第七版内存优化,打造流畅运行环境
# 摘要
本文深入探讨了Windows环境下内存管理的基础知识、理论与实践操作。文章首先介绍内存管理的基本概念和理论框架,包括不同类型的内存和分页、分段机制。接着,本文详细阐述了内存的分配、回收以及虚拟内存管理的策略,重点讨论了动态内存分配算法和内存泄漏的预防。第三章详细解析了内存优化技术,包括监控与分析工具的选择应用、内存优化技巧及故障诊断与解决方法。第四章聚焦于打造高性能运行环境,分别从系统、程
专家揭秘:7个技巧让威纶通EasyBuilder Pro项目效率翻倍

# 摘要
本论文旨在为初学者提供威纶通EasyBuilder Pro的快速入门指南,并深入探讨高效设计原则与实践,以优化用户界面的布局和提高设计的效率。同时,本文还涵盖了通过自动化脚本编写和高级技术提升工作效率的方法。项目管理章节着重于资源规划与版本控制策略,以优化项目的整体执行。最后,通过案例分析,本文提供了问题解决的实践方法和技巧,旨在帮助读者将理论知识应用于实际工作中,解决常见的开发难题,
Jetson Nano编程入门:C++和Python环境搭建,轻松开始AI开发

# 摘要
Jetson Nano作为NVIDIA推出的边缘计算开发板,以其实惠的价格和强大的性能,为AI应用开发提供了新的可能性。本文首先介绍了Jetson Nano的硬件组成、接口及配置指南,并讨论了其安全维护的最佳实践。随后,详细阐述了如何为Jetson Nano搭建C++和P
软件操作手册撰写:遵循这5大清晰易懂的编写原则

# 摘要
软件操作手册是用户了解和使用软件的重要参考文档,本文从定义和重要性开始,详细探讨了手册的受众分析、需求评估、友好的结构设计。接下来,文章指导如何编写清晰的操作步骤,使用简洁的语言,并通过示例和截图增强理解。为提升手册的质量,本文进一步讨论了实现高级功能的说明,包含错误处理、自定义设置以及技术细节。最后,探讨了格式选择、视觉布局和索引系统的设计,以及测试、反馈收集与文档持续改进的策略。本文旨在为编写高
西门子G120变频器维护秘诀:专家告诉你如何延长设备寿命

# 摘要
本文对西门子G120变频器的基础知识、日常维护实践、故障诊断技术、性能优化策略进行了系统介绍。首先,概述了变频器的工作原理及关键组件功能,然后深入探讨了变频器维护的理论基础,包括日常检查、定期维护流程以及预防性维护策略的重要性。接着,文章详述了西门子G
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )