【Python栅格数据地理空间分析】:坐标转换与实时更新的秘密
发布时间: 2024-09-12 06:46:49 阅读量: 229 订阅数: 90 

python2.7栅格数据批量转换投影

# 1. Python栅格数据地理空间分析基础
## 1.1 栅格数据概念解析
栅格数据由规则的网格单元组成,每个单元格(像素)包含特定的值,用于表示空间分布特征。与矢量数据不同,栅格数据不依赖于几何形状,它能够非常直观地表达连续地理现象,如卫星遥感影像或气象预报图。在Python中处理栅格数据主要依赖于GDAL库,这是一款功能强大的地理数据处理工具。
## 1.2 Python在栅格数据处理中的角色
Python是一种广泛应用于数据科学领域的高级编程语言,拥有大量的数据处理库和工具。在栅格数据处理领域,Python凭借其简洁的语法和强大的生态系统,如NumPy、Pandas、GDAL/OGR、Rasterio等,已成为进行地理空间分析的首选语言。它允许用户轻松地读取、分析和可视化地理信息数据。
## 1.3 Python栅格数据处理的基本流程
进行Python栅格数据分析时,通常包括以下几个步骤:
1. **导入库与加载数据**:使用Rasterio或GDAL库导入栅格数据。
2. **数据预处理**:对栅格数据进行裁剪、重投影、合并等预处理操作。
3. **空间分析**:利用NumPy和SciPy库进行数据分析,如计算坡度、提取特征等。
4. **结果可视化**:通过Matplotlib或Seaborn库展示分析结果。
下面的示例代码展示了如何使用Python读取栅格数据,并显示基本属性。
```python
import rasterio
# 打开栅格数据文件
with rasterio.open('example.tif') as src:
# 显示栅格数据的属性信息
print(src.profile)
# 输出的属性信息可能包括如下内容
# {'driver': 'GTiff', 'dtype': 'uint8', 'nodata': None, 'width': 100, 'height': 100, 'count': 3, 'crs': CRS.from_epsg(3857), 'transform': Affine(30.0, 0.0, 256780.0, 0.0, -30.0, 2523240.0)}
```
这一章节的内容为读者提供了一个基础的Python栅格数据处理概览,为后续深入学习坐标转换、实时更新机制构建和高级应用奠定了基础。
# 2. 坐标转换的理论与实践
### 2.1 坐标系统概述
坐标系统是地理空间分析的基础,是理解位置、距离、方向等概念的框架。不同的坐标系统适用于不同的应用场景,且每种坐标系统都有其特定的用途和限制。本节将详细介绍常见的坐标系统以及它们之间的转换原理。
#### 2.1.1 常见坐标系统的介绍
在地理信息系统(GIS)中,最常用的坐标系统可以分为两大类:地理坐标系统(Geographic Coordinate Systems, GCS)和投影坐标系统(Projected Coordinate Systems, PCS)。
- **地理坐标系统**是基于地球的三维模型,使用经纬度来表示位置。常见的GCS有WGS 84(World Geodetic System 1984),它被广泛用于全球定位系统(GPS)。GCS可以提供精确的地表位置,但不适用于测量长度、面积和角度。
- **投影坐标系统**则是将地球的三维曲面转换成二维平面的过程。它解决了GCS无法直接用于精确测量的缺点。例如,UTM(Universal Transverse Mercator)是一种广泛应用于大比例尺地图的PCS,它将地球分成60个区域,并为每个区域提供了一个平面坐标系统。
#### 2.1.2 坐标系统间的转换原理
从一个坐标系统转换到另一个坐标系统,需要遵循特定的数学模型。转换通常包括两个主要步骤:从原始GCS到中间PCS的转换,再从PCS到目标GCS的转换。
- **地理到投影的转换**涉及将经纬度值转换为平面的X和Y坐标值。这个过程中会使用到地图投影方法,如等角、等面积或等距离投影。
- **投影到地理的转换**则是将X和Y坐标值转回经纬度。这个过程通常涉及到反向投影,需要解决复杂的数学方程。
### 2.2 坐标转换方法详解
接下来,我们将深入讨论坐标转换的数学基础和常用方法,这些方法包括了几何转换、仿射变换和投影变换。
#### 2.2.1 几何转换方法
几何转换涉及基本的平移、旋转、缩放等操作,这些操作通常用于处理不同地理坐标系统之间的偏移量。几何转换方法适用于那些简单的转换需求,比如在一张地图上的局部调整。
- **平移**是指在地图坐标上增加一个固定的偏移量。
- **旋转**可以调整地图的方向,以匹配另一个坐标系统。
- **缩放**可以调整比例尺,使得地图的尺寸更加匹配目标坐标系统的标准。
几何转换操作一般用于地图配准过程中,调整地图的地理位置。
#### 2.2.2 仿射变换和投影变换
对于更加复杂的坐标系统转换,如从一个投影坐标系统转换到另一个,仿射变换和投影变换提供了更强大的工具。
- **仿射变换**是一种线性变换,它保留了线的平行性,但不保证角度或面积的保持。仿射变换通常用在图像处理和栅格数据转换中。
- **投影变换**则涉及到更复杂的数学运算,它将地表的三维坐标转换成二维地图平面。每种投影方法都有其独特的数学公式,例如墨卡托投影(Mercator projection)和兰伯特等角圆锥投影(Lambert Conformal Conic projection)。
### 2.3 Python中的坐标转换实践
现在,我们将具体探讨如何在Python中实现坐标转换,我们将使用GDAL库作为示例,演示如何在实际应用中进行坐标转换。
#### 2.3.1 使用GDAL库进行坐标转换
GDAL(Geospatial Data Abstraction Library)是一个用于读写栅格空间数据格式的开源库。它不仅支持多种数据格式,还内置了强大的坐标转换功能。
为了使用GDAL进行坐标转换,首先需要安装GDAL Python绑定。然后,我们可以使用GDAL的命令行工具或Python接口来执行坐标转换。
下面是一个使用Python调用GDAL执行坐标转换的简单示例:
```python
from osgeo import gdal
# 打开一个栅格数据集
ds = gdal.Open('input.tif', gdal.GA_ReadOnly)
# 获取源地理变换信息
geo_transform = ds.GetGeoTransform()
# 创建目标坐标系统
target_crs = 'EPSG:4326' # 这里使用WGS 84坐标系统
target_srs = osr.SpatialReference()
target_srs.ImportFromEPSG(int(target_crs))
# 获取源坐标系统
source_srs = osr.SpatialReference()
source_srs.ImportFromWkt(ds.GetProjection())
# 创建坐标转换对象
transform = osr.CoordinateTransformation(source_srs, target_srs)
# 坐标转换
x, y = transform.TransformPoint(geo_transform[0], geo_transform[3])
# 在这里可以继续处理转换后的坐标,比如写入新的栅格数据集或进行分析等。
```
#### 2.3.2 实战案例分析
通过一个实际案例,我们将演示如何使用GDAL进行坐标转换。
假设我们有一个栅格数据集,它使用的是UTM坐标系统,我们需要将其转换到WGS 84坐标系统。以下是详细步骤:
1. **读取原栅格数据集**:
使用GDAL打开需要转换的栅格数据集,并获取其地理变换信息和坐标系统。
2. **设置目标坐标系统**:
通过EPSG代码,我们定义了目标坐标系统为WGS 84。
3. **创建坐标转换对象**:
使用`osr`模块创建从原坐标系统到目标坐标系统的转换对象。
4. **执行坐标转换**:
使用转换对象对数据集中的每个坐标点进行转换。我们通常需要对每个像素点进行操作,并更新其位置信息。
5. **验证结果**:
转换完成后,验证新数据集的坐标系统是否正确,可以使用GDAL工具或第三方软件进行检查。
通过这样的实践,我们可以实现复杂的坐标转换操作,并确保地理空间分析的准确性。
在下一节中,我们将探讨实时更新机制的构建,这将为我们提供处理动态数据的新方法和工具。
# 3. 实时更新机制的构建
## 3.1 实时数据流的概念
### 3.1.1 实时数据流的重要性
在当今信息化社会,各种应用系统对于数据的实时性要求越来越高。实时数据流是指数据以连续或间断的方式,按照它们产生的顺序和时间,被系统实时收集、处理和分发的过程。这种机制对于保证数据的时效性和准确性至关重要,尤其是在金融、物联网、遥感监测等领域。例如,股票交易市场必须实时处理市场数据,以保证交易的公正性和效率;而在城市交通监控系统中,实时数据流可帮助管理者及时了解交通状况,快速响应突发事件。
### 3.1.2 实时数据流的分类与特点
实时数据流可以分为连续流和离散流两种。连续流是指数据源不断产生数据,如传感器监测的数据;而离散流指的是数据在一定时间间隔内产生,例如智能设备的上报数据。实时数据流的特点包括:
- 高频率:数据以极高的频率持续产生。
- 实时性:系统必须在极短的时间内完成数据的处理和响应。
- 可靠性:即使在高负载情况下,系统也需要保证数据不丢失,处理不中断。
- 可扩展性:系统需能够适应数据量的波动,保持高效稳定的工作状态。
## 3.2 实时数据流的处理技术
### 3.2.1 数据采集技术
数据采集技术是实时数据流处理的第一步。在Python中,可以使用多种库来实现数据的采集。一个流行的库是`PySerial`,它用于通过串行端口与设备进行通信,适用于数据采集器等硬件。以下是一个使用`PySerial`进行数据采集的简单示例:
```python
import serial
import time
# 初始化串口配置
ser = serial.Serial(
port='/dev/ttyUSB0', # 指定串口名称
baudrate=9600, # 设置波特率
parity='N', # 无奇偶校验位
stopbits=1, # 停止位为1位
bytesize=serial.EIGHTBITS, # 数据位为8位
timeout=1 # 读超时时间
)
# 读取串口数据
try:
while True:
i
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 Python 栅格数据处理专栏!本专栏旨在为数据科学家、地理空间分析师和 GIS 专业人士提供全面的指南,了解如何使用 Python 高效处理栅格数据。我们将深入探讨栅格数据结构、实战案例分析、进阶指南、工具箱选择、数据融合技术、可视化技术、地理空间分析、面向对象编程、并行计算、数据压缩、交互式分析和高级技术。通过一系列深入的文章和示例,我们将帮助您掌握 Python 栅格数据处理的方方面面,并提升您的算法效率和性能。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Search-Match X数据分析:新手到专家的全面指南】:掌握软件安装、高级功能及问题解决策略

参考资源链接:[Search-Match X射线衍射分析软件详细教程与石英多相分析演示](https://wenku.csdn.net/doc/6tag38uq6d?spm=1055.2635.3001.10343)
# 1. Search-Match X
DMU遗传评估软件脚本编写技巧:自动化评估流程的秘密
参考资源链接:[DMU遗传评估软件使用指南](https://wenku.csdn.net/doc/7g8ic3wzdu?spm=1055.2635.3001.10343)
# 1. DMU遗传评估软件概述
遗传评估是动物育种学中的一个重要分支,旨在通过分析动物的遗传信息来评估其生产性能、抗病能力和遗传潜力。DMU软件是一款广受好评的遗传评估软件,它集成了多种统计模型和算法,能够高效地处理遗传数据并
编译原理课后习题精讲:构建与优化词法分析器的关键技巧
参考资源链接:[《编译原理》第三版 陈火旺 课后习题答案详解](https://wenku.csdn.net/doc/5zv4rf8r76?spm=1055.2635.3001.10343)
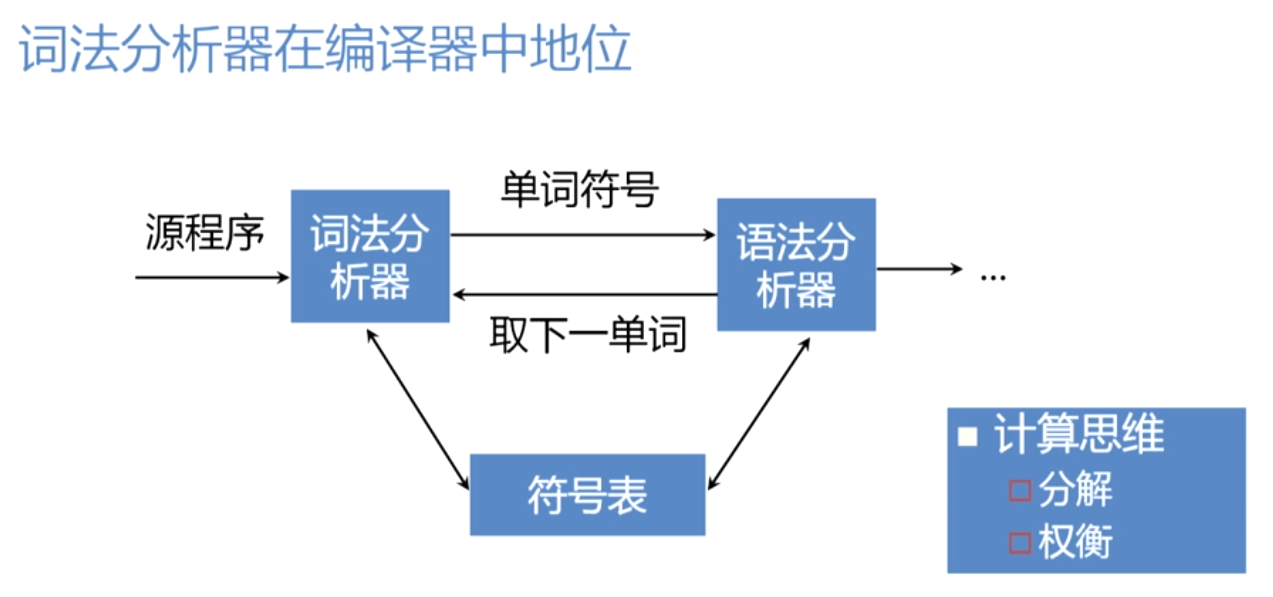
# 1. 词法分析器的构建基础
## 1.1 词法分析器的基本概念
词法分析器是编译器的前端部分,它的主要任务是读取源程序的字符序列,将它们组织成有意义的词素序列,并为每个词素生成相应的词法单元。词素是指源程序中具有独立意义的最小语法单位,如关键字、标
【ACS01伺服驱动器故障排除手册】:快速解决常见问题
参考资源链接:[Rexroth IndraDrive Cs ACS01 伺服驱动器Manual.pdf](https://wenku.csdn.net/doc/644b79b4fcc5391368e5edde?spm=1055.2635.3001.10343)
# 1. ACS01伺服驱动器故障排除概述
## 1.1 故障排除的必要性
在自动化控制系统中,ACS01伺服驱动器作为关键的运动控制组件,其稳定性对整个系统的运行至关重要。故障排除不仅可以迅速恢复生产,还能够预防潜在问题,确保设备长期稳定运行。
## 1.2 故障排除的基本步骤
进行故障排除时,首先要确保了解设备的基本操作原理和系
【VMware VCSA 7.0.0升级维护】:确保系统稳定的黄金法则

参考资源链接:[VMware vCenter Server Appliance ISO与ESXi镜像下载及安装资源](https://wenku.csdn.net/doc/7cegmkw1ig?spm=1055.2635.3001.10343)
PDMS评审五大步骤:掌握关键,项目成功的秘密武器
参考资源链接:[AVEVA PDMS Review教程:全面掌握三维工厂设计审查](https://wenku.csdn.net/doc/6412b752be7fbd1778d49e2f?spm=1055.2635.3001.10343)
# 1. PDMS评审概述
PDMS(Product Data Management System)评审是确保产品数据准确性和有效性的关键过程。在现代企业管理中,PDMS评审不仅能优化数据管理,还能推动业务流程的改进。本章旨在为读者提供PDMS评审的全局概览,概述其重要性及基础实施步骤。
## 1.1 PDMS评审的目标与意义
PDMS评审的主要目标是
Maxent模型优化终极指南:参数调优与性能飙升策略

参考资源链接:[基于最大熵算法的物种分布模型MaxEnt使用指南](https://wenku.csdn.net/doc/1j97ct1vh2?spm=1055.2635.3001.10343)
# 1. Maxent模型概述与基础应用
## 1.1 Maxent模型简介
Maxent模型,即最大熵模型,是一种常用的统计模型,广泛应用于自然语言处理、生物信息学等多个领域。它基于最大熵原理,旨在从给
电容式传感器位移特性实验:15个秘诀提升实验精度和可靠性

参考资源链接:[电容式传感器位移特性实验分析](https://wenku.csdn.net/doc/7sc9ae1qsr?spm=1055.2635.3001.10343)
# 1. 电容式传感器概述及其位移特性
电容式传感器是利用电容器极板间电场变化而工作的测量器件,广泛应用于位移、压力等物理量的检测。位移特性是指传感器对位移量变化的敏感度,直接关系到测量精度和可靠性。
##
【刷机必看】:QFIL操作中常见问题及解决方案速查手册
参考资源链接:[高通QFIL用户指南: flashing高通设备的步骤](https://wenku.csdn.net/doc/64741754d12cbe7ec310a971?spm=1055.2635.3001.10343)
# 1. QFIL工具简介与刷机流程概述
## 1.1 QFIL工具简介
QFIL(Qualcomm Flash Image Loader)是一款专为高通(Qualcomm)芯片设备设计的刷机工具,广泛用于修复和更新Android设备的固件。它支持高通驱动的多种设备,是业界公认的刷机利器之一。QFIL的界面直观易用,支持多种操作,如设备信息查看、系统文件备份、ROM
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )