【实践中的决策树】:10个案例带你深入理解业务应用
发布时间: 2024-09-04 17:54:43 阅读量: 90 订阅数: 39 
# 1. 决策树基础概念和原理
决策树是机器学习中一种常用的预测模型,它的结构类似一棵树,由节点和边构成,每一个内部节点都表示一个属性上的判断,每个分支代表一个判断结果的输出,最终的叶节点代表一种分类结果。这种方法之所以受欢迎,是因为它易于理解和实现,同时在很多情况下仍能取得不错的预测性能。
**基本概念:**
- **节点(Node)**:决策树中的每一个决策点或判断条件,包含一个特征和该特征对应的测试。
- **分支(Branch)**:由节点引出的路径,根据测试条件的结果指向不同的分支。
- **叶节点(Leaf)**:树的末端节点,代表了决策结果。
**原理:**
决策树的核心思想是利用特征选择,对数据集进行分割,使分割后的子集尽可能地属于同一类别。这是通过计算信息增益或基尼不纯度等指标来实现的。信息增益衡量了通过某个特征的测试,能带来多少“信息量”,即数据集不确定性的减少量;基尼不纯度则衡量了从数据集中随机选取两个样本,标签不一致的概率。
通过递归地选择最优特征,并根据该特征对数据集进行分割,决策树就能被构建起来。这一过程在每个新节点上重复进行,直到满足停止条件,例如达到最大深度、节点中的所有实例都属于同一类别等。由于这种逐步分裂的方式,决策树往往能够很好地捕捉数据中的非线性关系。
# 2. 决策树算法和模型构建
## 2.1 决策树的构建过程
### 2.1.1 树的生成和分裂标准
构建决策树的过程中,我们首先需要理解决策树如何生长,即树的生成和分裂标准。在生成树的过程中,我们要选择最优的特征来分裂节点,以此来最小化节点内的不纯度。通常使用的分裂标准包括信息增益(ID3算法),增益率(C4.5算法)以及基尼不纯度(CART算法)。
信息增益是通过计算分裂前后数据集的信息熵来衡量,它反映了通过特征分裂带来的信息量。增益率则是在信息增益的基础上加入了对特征数量的惩罚,以解决ID3算法倾向于选择特征值多的特征。而基尼不纯度则是通过计算一个随机选取的样本被错误分类的概率来评估。
在实践中,树的生成通常遵循自顶向下的递归过程,开始于单个节点,按照一定的分裂标准分裂为两个子节点,这个过程会递归地在子节点上重复,直到满足特定的停止条件。停止条件可以是树达到最大深度,节点内所有数据属于同一类,或者分裂后的信息增益小于某个阈值等。
```mermaid
graph TD
A[开始] --> B{节点是否满足停止条件?}
B -->|是| C[生成叶节点]
B -->|否| D[选择最佳分裂特征]
D --> E[分裂节点]
E --> F{所有特征是否考虑完毕?}
F -->|否| B
F -->|是| G{是否达到预设最大深度?}
G -->|否| B
G -->|是| C
```
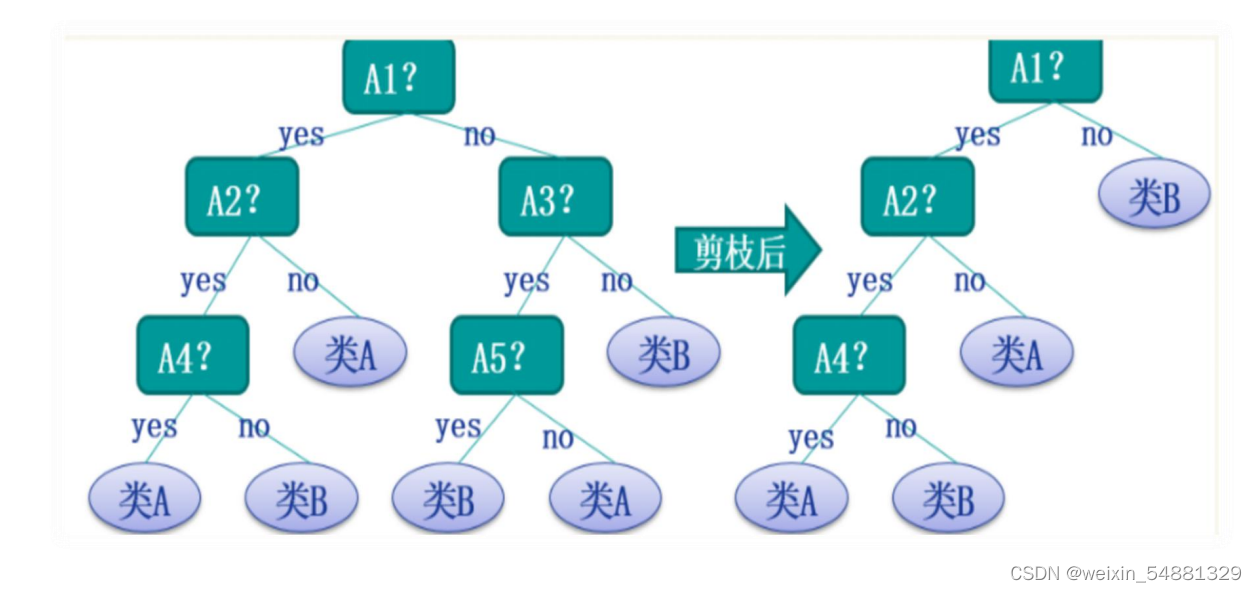
### 2.1.2 剪枝策略与过拟合避免
决策树的一个主要问题是在学习数据上的表现很好,但在未见数据上表现较差,也就是过拟合。为了解决这个问题,决策树算法中通常会引入剪枝策略来减小过拟合的风险。
剪枝分为预剪枝和后剪枝两种。预剪枝是在树构建过程中提前停止分裂节点,而后剪枝则是在树完全构建后通过移除部分节点来简化树结构。预剪枝通过设置限制条件来减少树的复杂度,例如限制树的深度、限制节点的最小样本数或限制信息增益的最小值等。后剪枝则会评估每个节点对最终分类结果的影响,并去除那些影响最小的节点。
后剪枝策略可以使用诸如成本复杂度剪枝(CCP)的方法,该方法基于一个惩罚项来考虑节点的复杂度和分类错误率,通过优化这个组合目标来确定剪枝的节点。
## 2.2 决策树算法的分类
### 2.2.1 ID3、C4.5和CART算法比较
决策树算法有多种,其中最著名的包括ID3,C4.5和CART算法。ID3算法使用信息增益作为分裂标准,它倾向于选择值多的特征进行分裂,容易过拟合,同时不适用于连续数值特征。C4.5算法是ID3的改进版,它引入了增益率概念来解决连续特征问题,并能处理缺失值。CART算法则采用二分法策略,产生二叉树,它不仅可以用于分类问题,还可以处理回归问题。
| 算法 | 分裂标准 | 处理连续特征 | 处理缺失值 | 应用范围 |
|------|------------|--------------|------------|------------|
| ID3 | 信息增益 | 无 | 无 | 分类 |
| C4.5 | 增益率 | 有 | 有 | 分类 |
| CART | 基尼不纯度 | 有 | 有 | 分类/回归 |
### 2.2.2 随机森林与提升树
随机森林是一种集成学习方法,通过构建多个决策树并进行投票来提高预测准确性。它在每次分裂时使用随机选取的特征子集来构建树,增加了模型的多样性。随机森林的主要优点是它很少过拟合,同时在处理高维数据时表现出色。
提升树(Boosting Trees)则是一种迭代的方法,每一棵树都会尝试修正前一棵树的错误。常见的提升树算法包括AdaBoost和梯度提升树(GBM)。提升树在每一次迭代时都会关注之前模型预测错误的样本,并逐步提高这部分样本的权重,最终生成的模型是多个决策树的加权组合。
## 2.3 决策树模型的评估与优化
### 2.3.1 模型准确度评估方法
评估决策树模型的准确度通常使用一些统计评估方法,其中最常用的是混淆矩阵,它记录了真实类标签与预测类标签的对应情况。基于混淆矩阵可以计算出精确度、召回率、F1分数和ROC曲线等指标。
精确度反映了模型预测正确的正例占所有预测为正例的比例;召回率关注模型捕获的正例占实际所有正例的比例;F1分数是精确度和召回率的调和平均数,为这两个指标提供了一个单一的评分指标;ROC曲线则通过在不同的分类阈值下计算真正率和假正率来评估模型在不同情况下的表现。
### 2.3.2 模型调参和优化策略
优化决策树模型的过程,即模型调参(Hyperparameter Tuning),是指选择最佳的模型参数来改进模型性能。常见的参数包括树的深度、叶子节点最少样本数、分裂所需的最小信息增益等。
调参过程可以使用网格搜索(Grid Search)、随机搜索(Random Search)或贝叶斯优化等方法。网格搜索通过遍历预定义的参数组合来找到最优的参数设置,虽然计算量大,但能保证找到全局最优解。随机搜索在预定义的参数范围内随机选择参数组合,计算量相对较小。贝叶斯优化则使用贝叶斯概率模型来指导搜索过程,它在计算效率和结果质量上都有很好的表现。
```python
from sklearn.model_selection import GridSearchCV
from sklearn.tree import DecisionTreeClassifier
# 设定决策树的参数网格
param_grid = {
'criterion': ['gini', 'entropy'],
'max_depth': range(1, 10),
'min_samples_split': range(2, 10)
}
# 创建决策树分类器实例
clf = DecisionTreeClassifier()
# 使用网格搜索进行参数优化
grid_search = GridSearchCV(clf, param_grid, cv=5)
grid_search.fit(X_train, y_train)
# 输出最佳参数和最佳分数
print("Best parameters:", grid_search.best_params_)
print("Best score:", grid_sear
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨决策树模型,涵盖其核心原理、模型评估、超参数调优、与随机森林的对比、业务应用、模型解读、大数据优化、不平衡数据处理、评估指标、时间序列预测、金融风险评估和医疗诊断伦理等方方面面。通过深入浅出的讲解和丰富的案例分析,专栏旨在帮助读者全面理解决策树模型的原理、应用和优化策略,并解决实际业务场景中遇到的各种挑战。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
REmap包在R语言中的高级应用:打造数据驱动的可视化地图

# 1. REmap包简介与安装
## 1.1 REmap包概述
REmap是一个强大的R语言包,用于创建交互式地图。它支持多种地图类型,如热力图、点图和区域填充图,并允许用户自定义地图样式,增加图形、文本、图例等多种元素,以丰富地图的表现形式。REmap集成了多种底层地图服务API,比如百度地图、高德地图等,使得开发者可以轻松地在R环境中绘制出专业级别的地图。
## 1.2 安装REmap包
在R环境
geojsonio包在R语言中的数据整合与分析:实战案例深度解析

# 1. geojsonio包概述及安装配置
在地理信息数据处理中,`geojsonio` 是一个功能强大的R语言包,它简化了GeoJSON格式数据的导入导出和转换过程。本章将介绍 `geojsonio` 包的基础安装和配置步骤,为接下来章节中更高级的应用打下基础。
## 1.1 安装geojsonio包
在R语言中安装 `geojsonio` 包非常简单,只需使用以下命令:
```
【构建交通网络图】:baidumap包在R语言中的网络分析

# 1. baidumap包与R语言概述
在当前数据驱动的决策过程中,地理信息系统(GIS)工具的应用变得越来越重要。而R语言作为数据分析领域的翘楚,其在GIS应用上的扩展功能也越来越完善。baidumap包是R语言中用于调用百度地图API的一个扩展包,它允许用户在R环境中进行地图数据的获取、处理和可视化,进而进行空间数据分析和网
R语言与GoogleVIS包:制作动态交互式Web可视化

# 1. R语言与GoogleVIS包介绍
R语言作为一种统计编程语言,它在数据分析、统计计算和图形表示方面有着广泛的应用。本章将首先介绍R语言,然后重点介绍如何利用GoogleVIS包将R语言的图形输出转变为Google Charts API支持的动态交互式图表。
## 1.1 R语言简介
R语言于1993年诞生,最初由Ross Ihaka和Robert Gentleman在新西
R语言与Rworldmap包的深度结合:构建数据关联与地图交互的先进方法

# 1. R语言与Rworldmap包基础介绍
在信息技术的飞速发展下,数据可视化成为了一个重要的研究领域,而地理信息系统的可视化更是数据科学不可或缺的一部分。本章将重点介绍R语言及其生态系统中强大的地图绘制工具包——Rworldmap。R语言作为一种统计编程语言,拥有着丰富的图形绘制能力,而Rworldmap包则进一步扩展了这些功能,使得R语言用户可以轻松地在地图上展
【R语言空间数据操作】:sf包全攻略,掌握空间分析核心技能
# 1. R语言与空间数据分析基础
在当前的IT和数据科学领域,地理空间数据的分析变得越来越重要。R语言作为一个开源的统计编程语言,其在空间数据分析中的应用日益广泛。本章节将作为读者了解R语言进行空间数据分析的起点,首先介绍R语言在空间数据处理方面的基本概念和优势,然后逐步深入探讨R语言处理空间数据的各个环节。
本章节将覆盖以下内容:
- R语言概述:它是一个自由软件编程语言和操作环
【R语言数据可读性】:利用RColorBrewer,让数据说话更清晰
# 1. R语言数据可读性的基本概念
在处理和展示数据时,可读性至关重要。本章节旨在介绍R语言中数据可读性的基本概念,为理解后续章节中如何利用RColorBrewer包提升可视化效果奠定基础。
## 数据可读性的定义与重要性
数据可读性是指数据可视化图表的清晰度,即数据信息传达的效率和准确性。良好的数据可读
R语言数据包用户社区建设
# 1. R语言数据包用户社区概述
## 1.1 R语言数据包与社区的关联
R语言是一种优秀的统计分析语言,广泛应用于数据科学领域。其强大的数据包(packages)生态系统是R语言强大功能的重要组成部分。在R语言的使用过程中,用户社区提供了一个重要的交流与互助平台,使得数据包开发和应用过程中的各种问题得以高效解决,同时促进
rgdal包的空间数据处理:R语言空间分析的终极武器

# 1. rgdal包概览和空间数据基础
## 空间数据的重要性
在地理信息系统(GIS)和空间分析领域,空间数据是核心要素。空间数据不仅包含地理位置信息,还包括与空间位置相关的属性信息,使得地理空间分析与决策成为可能。
## rgdal包的作用
rgdal是R语言中用于读取和写入多种空间数据格式的包。它是基于GDAL(Geospatial Data Abstraction Library)的接口,支持包括
R语言统计建模与可视化:leaflet.minicharts在模型解释中的应用

# 1. R语言统计建模与可视化基础
## 1.1 R语言概述
R语言是一种用于统计分析、图形表示和报告的编程语言和软件环境。它在数据挖掘和统计建模领域得到了广泛的应用。R语言以其强大的图形功能和灵活的数据处理能力而受到数据科学家的青睐。
## 1.2 统计建模基础
统计建模
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )