无人机开发黄金法则】:基于DJI Mobile SDK构建高效项目实战指南
发布时间: 2024-12-26 14:12:17 阅读量: 7 订阅数: 10 

基于Java和Kotlin的DJI Mobile SDK Android V5开发版Demo设计源码

# 摘要
本文全面介绍DJI无人机开发的各个方面,从DJI Mobile SDK的核心组件解读到无人机控制与数据采集的实战应用,再到高级功能的开发与集成,最后探讨项目实施、优化策略以及未来的技术趋势。本文详细阐述了SDK的安装、配置以及架构组件,深入探讨了实时飞行控制、视频流与图像处理、数据记录与分析等关键技术和应用场景。同时,本文还探讨了自定义飞行模式、第三方集成、无人机集群控制等高级功能的开发和实现方法。此外,本文还提供了项目管理、性能优化、故障排除以及成果展示和未来展望的实战经验,旨在为无人机开发者提供一个全面的技术指南和参考手册。
# 关键字
DJI无人机;Mobile SDK;实时飞行控制;视频图像处理;数据记录分析;性能优化
参考资源链接:[大疆Mobile SDK开发全攻略:构建无人机应用必备教程](https://wenku.csdn.net/doc/2uw8t3yc0w?spm=1055.2635.3001.10343)
# 1. DJI无人机开发概述
## 无人机技术的重要性
无人机技术已经成为现代科技领域的一个重要分支。随着其在航拍、农业、物流等多个领域的广泛应用,对开发人员提出了新的挑战。开发者们需要掌握如何通过DJI提供的开发工具来扩展无人机的潜力,满足各种创新需求。
## DJI无人机开发的历史背景
大疆创新(DJI)作为全球领先的无人机制造商,为开发者提供了丰富的开发资源。DJI Mobile SDK是一个集成到各种移动设备中的软件开发工具包,它允许开发者编写应用程序来控制无人机,并获取无人机数据。SDK的开放推动了无人机在商业和民用市场的普及。
## 开发者面对的挑战与机遇
虽然DJI SDK极大简化了开发流程,但开发者仍需面对多变的无人机操作环境、安全法规的遵循以及应用创新的挑战。通过深入了解和应用DJI Mobile SDK,开发者可以开发出功能强大的应用程序,从而在竞争激烈的市场中抓住机遇,为无人机技术的发展做出贡献。
# 2. DJI Mobile SDK核心组件解读
## 2.1 SDK安装与配置
### 2.1.1 环境搭建要求
在开始DJI Mobile SDK的安装与配置之前,我们首先需要确保我们的开发环境满足以下基本要求:
- **操作系统支持**: 适用于Windows, macOS以及Linux。
- **开发工具**: 根据个人喜好,可以选择Android Studio、Xcode或其他IDE工具。
- **编程语言**: 支持Java、Kotlin、Objective-C和Swift。
接下来,我们需要安装和配置必要的工具和SDK组件,这包括:
- JDK(Java Development Kit),用于Android开发。
- Xcode,用于iOS开发,以及相应的Swift或Objective-C编译环境。
- DJI Mobile SDK,包含最新的SDK文档和示例代码。
### 2.1.2 SDK安装步骤
为了安装DJI Mobile SDK,我们需要遵循以下步骤:
1. 访问DJI官方开发者网站,下载最新的DJI Mobile SDK。
2. 解压下载的文件,根据操作系统的不同,找到对应的文件夹。
3. 在项目中配置SDK路径。例如,在Android Studio中,需要将SDK的jar文件添加到项目的`libs`目录,并在`build.gradle`文件中引用它。
```gradle
dependencies {
implementation files('libs/DJISDK.jar')
}
```
4. 在初始化应用程序之前,需要在应用的`AndroidManifest.xml`文件中添加必要的权限和用户协议。
```xml
<uses-permission android:name="android.permission.BLUETOOTH"/>
<uses-permission android:name="android.permission.INTERNET"/>
<uses-permission android:name="android.permission.ACCESS_FINE_LOCATION" />
<uses-permission android:name="android.permission.ACCESS_COARSE_LOCATION" />
```
5. 在应用的启动界面或主Activity中初始化SDK。
```java
public class MainActivity extends Activity {
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
DJISDKManager.registerApp(this);
}
}
```
一旦完成以上步骤,我们就可以开始探索SDK的其他组件和功能了。
## 2.2 SDK架构与组件介绍
### 2.2.1 主要模块划分
DJI Mobile SDK的主要模块包括:
- **Drone**: 这是SDK中最重要的模块之一,负责无人机的飞行控制和状态管理。
- **Media**: 这个模块用于处理无人机的摄像头数据,包括照片和视频的拍摄、下载和直播功能。
- **FlightController**: 这是无人机飞行控制的核心模块,提供飞行模式设置和飞行参数的调整接口。
- **Vision**: 包含无人机的视觉系统功能,例如视觉定位和视觉跟踪。
- **Telemetry**: 提供无人机飞行数据和状态信息的实时反馈。
### 2.2.2 关键组件功能与用途
- **DJI SDK Manager**: 管理SDK的初始化、注册和更新。
- **Product**: 表示无人机的抽象类,提供获取无人机固件版本、产品类型等信息的方法。
- **Waypoint**: 支持航点飞行,允许无人机按预设路径飞行。
- **Mission Control**: 用于高级任务规划和执行,如自动起飞、着陆、执行预设航线飞行等。
- **Operation**: 包含飞行任务和操作的接口,例如控制无人机的起飞和降落。
SDK提供了丰富的API和回调机制,开发者可以通过这些接口实现与无人机的交互,并根据需要处理无人机的飞行数据和状态信息。
## 2.3 基础通信机制
### 2.3.1 连接与断开操作
连接无人机是控制无人机的第一步。在DJI Mobile SDK中,主要通过`ConnectController`类实现无人机的连接操作。以下是连接无人机的基本步骤:
1. 初始化`ConnectController`并设置连接参数。
2. 调用`connect`方法,尝试连接到无人机。
3. 在连接成功或失败时,通过监听器接收回调通知。
```java
ConnectController connectController = DJISDKManager.getInstance().getConnectController();
connectController.setConnectionCallback(new IConnectionCallback() {
@Override
public void onConnected() {
Log.i("TAG", "onConnected");
// 在无人机连接成功时执行的操作
}
@Override
public void onDisconnected() {
Log.i("TAG", "onDisconnected");
// 在无人机断开连接时执行的操作
}
});
connectController.connect();
```
连接无人机后,应用程序将能够接收无人机的状态信息,并发送控制指令。
### 2.3.2 数据包与协议解析
与无人机通信的数据通常以数据包的形式发送和接收,这些数据包遵循特定的通信协议。DJI Mobile SDK提供了数据包解析的接口和工具,帮助开发者处理和解析这些数据。
例如,要获取无人机的电池状态,可以监听`BatteryState`消息:
```java
final MessageCenter messageCenter = DJISDKManager.getInstance().getMessageCenter();
messageCenter.registerHandler(new MessageHandler() {
@Override
public void processMessage(Message msg) {
switch (msg.what) {
case Message.BATTERY_STATE_CHANGED:
BatteryState batteryState = (BatteryState) msg.obj;
Log.i("TAG", "Battery level: " + batteryState.level);
break;
default:
break;
}
}
});
```
通过这种方式,应用程序可以实时获取无人机的电池状态,并在电池电量过低时提醒用户。
以上是第二章的主要内容,我们深入探讨了SDK的安装与配置,详细介绍了SDK架构与关键组件,并且解析了基础通信机制。在下一章节中,我们将进一步探索无人机控制与数据采集的实战应用,敬请期待。
# 3. 无人机控制与数据采集实战
## 3.1 实时飞行控制
### 3.1.1 飞行参数设置与调整
在进行无人机的实时飞行控制前,首先需要了解并设置好相关的飞行参数。这些参数包括但不限于飞行速度、飞行高度、转弯角度等,它们会直接影响无人机的操控特性和飞行安全。
调整飞行参数是一个需要细致操作的过程,开发者需要根据无人机的使用场景和预期的飞行任务来调整参数。例如,在室内环境下,飞行速度应适当降低以避免碰撞,而在开阔地带,可以提高速度以进行快速的数据采集。
代码示例:
```python
# 设置飞行参数
drone.speed = 5.0 # 设置飞行速度为5 m/s
drone.altitude = 10.0 # 设置飞行高度为10米
drone.turn_angle = 30 # 设置转弯角度为30度
```
参数说明:
- `drone.speed`:设置无人机的飞行速度,单位为米/秒。
- `drone.altitude`:设置无人机的飞行高度,单位为米。
- `drone.turn_angle`:设置无人机的转弯角度,单位为度。
### 3.1.2 控制指令的发送与响应
在设置好飞行参数后,接下来就是通过控制指令来操纵无人机执行具体的飞行动作。控制指令的发送通常涉及一个或多个具体的函数调用,例如起飞、降落、前进、后退等。
在DJI Mobile SDK中,我们可以通过调用特定的API来发送这些指令,并且监听无人机的响应来确保指令已经被正确执行。例如,起飞操作可以通过调用`takeoff()`函数来完成,然后监听`onTakeoff()`事件确认起飞成功。
代码示例:
```python
# 发送起飞指令
drone.takeoff()
# 监听起飞事件
def onTakeoff():
print("无人机已起飞")
# 在这里添加起飞后的逻辑,例如开始执行飞行计划等
# 关联起飞事件与事件处理函数
drone.on('takeoff', onTakeoff)
```
逻辑分析:
- `drone.takeoff()`:调用起飞函数,无人机将根据当前设置的飞行参数起飞。
- `drone.on('takeoff', onTakeoff)`:监听起飞事件,并指定事件发生时调用`onTakeoff()`函数进行后续处理。
参数说明:
- `drone.on('takeoff', onTakeoff)`:`onTakeoff`是一个事件处理函数,当无人机完成起飞动作时被调用。
## 3.2 视频流与图像处理
### 3.2.1 视频流捕获与处理技术
为了获取实时的环境信息,无人机通常配备有摄像头,并能够实时传输视频流。开发者可以利用DJI Mobile SDK捕获和处理这些视频流,进而实现如实时监控、图像识别等功能。
在捕获视频流时,需要确保无人机的相机已经开启并且与SDK正确连接。一旦连接成功,可以通过回调函数来接收视频帧,并进行进一步的处理。
代码示例:
```python
# 打开无人机摄像头并开始接收视频流
drone.camera.open()
# 定义一个回调函数处理每一帧视频数据
def onFrameReceived(frame):
# 对接收到的视频帧进行处理
processFrame(frame)
# 绑定视频帧接收事件与回调函数
drone.camera.onFrameReceived = onFrameReceived
```
参数说明:
- `drone.camera.open()`:开启无人机的摄像头。
- `drone.camera.onFrameReceived`:定义了一个回调函数`onFrameReceived`来处理接收到的视频帧数据。
### 3.2.2 图像识别与处理案例
图像识别是无人机视频流处理中的一个重要应用领域。使用图像识别技术,无人机可以在飞行过程中自动识别和跟踪特定的目标或模式。
以目标跟踪为例,可以使用OpenCV库结合DJI SDK来实现。首先,需要在无人机飞行过程中捕获视频流,并将每一帧图像传递到OpenCV进行处理。在OpenCV中,可以利用已有的算法库如Haar级联分类器、HOG+SVM或深度学习网络进行目标的检测和跟踪。
代码示例:
```python
import cv2
# 加载预训练的目标检测模型
tracker = cv2.TrackerCSRT_create()
video_capture = cv2.VideoCapture(drone.camera.getVideoStreamUri())
ok, frame = video_capture.read()
# 定义一个用于跟踪的矩形区域
bbox = cv2.selectROI(frame, False)
# 初始化跟踪器
tracker.init(frame, bbox)
while True:
# 读取新的视频帧
ok, frame = video_capture.read()
if not ok:
break
# 更新跟踪器并获取跟踪结果
ok, bbox = tracker.update(frame)
if ok:
# 绘制跟踪的矩形框
p1 = (int(bbox[0]), int(bbox[1]))
p2 = (int(bbox[0] + bbox[2]), int(bbox[1] + bbox[3]))
cv2.rectangle(frame, p1, p2, (0,255,0), 2, 1)
# 显示结果帧
cv2.imshow("Tracking", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
video_capture.release()
cv2.destroyAllWindows()
```
逻辑分析:
- `cv2.TrackerCSRT_create()`:创建一个基于CSRT算法的目标跟踪器。
- `cv2.selectROI()`:让用户选择要跟踪的目标区域。
- `tracker.update(frame)`:更新跟踪器并获取当前帧中的目标位置。
参数说明:
- `bbox`:目标的位置矩形框,包含了目标区域的x坐标、y坐标、宽度和高度。
## 3.3 数据记录与分析
### 3.3.1 数据记录方法与格式
无人机在执行任务时会收集到大量的数据,包括飞行日志、视频、图像以及其他传感器数据。为了便于后续的分析和处理,需要将这些数据以一种结构化和标准化的方式进行记录。
DJI Mobile SDK提供了相应的API来记录飞行日志和视频数据。视频数据通常以MP4或其他容器格式记录,而飞行日志则可能以二进制或JSON格式存储。选择合适的格式可以提高数据的可读性和后续处理的效率。
代码示例:
```python
# 开始记录飞行日志
drone.log.startRecord()
# 执行飞行任务...
# 停止记录飞行日志
drone.log.stopRecord()
# 获取飞行日志
log_data = drone.log.readLatest()
```
参数说明:
- `drone.log.startRecord()`:开始记录飞行日志。
- `drone.log.stopRecord()`:停止记录飞行日志。
### 3.3.2 数据分析与可视化工具
收集到的数据需要通过数据分析来提取有价值的信息。在本章节中,我们关注如何利用Python的数据分析库,如Pandas和Matplotlib,对飞行日志进行分析和可视化。
数据分析的过程通常包括数据清洗、数据变换、数据建模等步骤。通过这些步骤,我们可以从原始数据中提取出有用的信息,比如飞行路径、速度变化、电池消耗等。
代码示例:
```python
import pandas as pd
import matplotlib.pyplot as plt
# 将日志数据转换为Pandas DataFrame
df = pd.DataFrame(log_data)
# 分析飞行速度随时间的变化
df['timestamp'] = pd.to_datetime(df['timestamp'], unit='ms')
df.set_index('timestamp', inplace=True)
# 绘制速度变化图
plt.figure(figsize=(10,5))
plt.plot(df.index, df['speed'], color='blue')
plt.title('Flight Speed Over Time')
plt.xlabel('Time')
plt.ylabel('Speed (m/s)')
plt.grid(True)
plt.show()
```
逻辑分析:
- `pd.DataFrame(log_data)`:将飞行日志数据转换为Pandas DataFrame,便于进行后续的数据处理。
- `plt.plot()`:使用Matplotlib库绘制速度随时间变化的折线图。
参数说明:
- `df['timestamp']`:日志数据中的时间戳。
- `df['speed']`:日志数据中的飞行速度。
- `plt.title()`:图表的标题。
- `plt.xlabel()`和`plt.ylabel()`:图表的x轴和y轴标签。
# 4. 高级功能开发与集成
无人机技术不断进步,开发者需要掌握更高级的开发技能来满足日益复杂的应用场景。在第四章中,我们将深入了解如何开发自定义飞行模式,如何将第三方库集成到DJI无人机开发中,以及如何实现无人机集群控制。
## 4.1 自定义飞行模式开发
自定义飞行模式允许开发者根据特定的应用需求编写飞行逻辑,以实现更加智能和自动化的飞行任务。
### 4.1.1 编写自定义飞行逻辑
编写自定义飞行逻辑需要对无人机的飞行控制有深入的理解。DJI Mobile SDK提供了丰富的API接口,可以用来控制无人机的飞行行为。
#### 代码块示例
以下是一个简单的代码块示例,展示如何设置无人机起飞到一个特定高度。
```java
// 创建一个起飞指令
TakeoffAction takeoffAction = new TakeoffAction(coordinator,
new CommonCallbacks.CompletionCallback() {
@Override
public void onResult(DJIError error) {
if (error == null) {
// 起飞成功后,上升到指定高度
ActionMap actionMap = new ActionMap(coordinator);
actionMap.put(new ActionElement("height", new MissionParam("20")));
MissionManager.getInstance().startMission(actionMap,
new CommonCallbacks.CompletionCallback() {
@Override
public void onResult(DJIError djiError) {
if (djiError == null) {
Log.i("TakeoffTest", "Mission executed successfully!");
} else {
Log.e("TakeoffTest", "Mission failed with error: " + djiError.getDescription());
}
}
});
} else {
Log.e("TakeoffTest", "Takeoff action failed with error: " + error.getDescription());
}
}
});
// 执行起飞指令
takeoffAction.execute();
```
#### 参数说明与逻辑分析
- `TakeoffAction`类是用于控制无人机起飞的指令,它继承自`Action`基类。
- 在`TakeoffAction`的构造器中,我们传入了`coordinator`对象和一个`CompletionCallback`,这是事件处理回调。
- 起飞成功后,通过`ActionMap`对象设置一个上升到指定高度的动作。这里使用了`MissionParam`来指定高度值。
- `MissionManager`的`startMission`方法被调用来执行飞行任务。回调中处理了任务执行的结果。
### 4.1.2 状态机在飞行控制中的应用
在飞行控制程序中应用状态机能够提升程序的可读性和可维护性,尤其是在处理复杂的飞行逻辑时。状态机能够清晰地管理各个状态的转换,以及每个状态下应有的行为。
#### 代码块示例
下面的代码展示了如何使用状态机来管理无人机的起飞和降落过程。
```java
public enum FlightState {
TAKEOFF, HOVER, LAND, STOPPED
}
public class FlightControlStateMachine {
private FlightState currentState = FlightState.STOPPED;
public void takeoff() {
if (currentState == FlightState.STOPPED) {
// 执行起飞动作
起飞动作();
currentState = FlightState.TAKEOFF;
}
}
public void land() {
if (currentState == FlightState.HOVER) {
// 执行降落动作
降落动作();
currentState = FlightState.LAND;
}
}
// 其他状态转换和动作方法
}
```
#### 参数说明与逻辑分析
- `FlightState`枚举定义了几个关键的飞行状态:起飞(TAKEOFF),悬停(HOVER),降落(LAND),以及停止(STOPPED)。
- `FlightControlStateMachine`类使用一个状态变量来跟踪当前的状态,并定义了状态转换的方法,如`takeoff`和`land`。
- 在`takeoff`方法中,如果当前状态为`STOPPED`,则执行起飞动作,并更新当前状态为`TAKEOFF`。
- 在`land`方法中,如果当前状态为`HOVER`,则执行降落动作,并更新当前状态为`LAND`。
## 4.2 第三方集成与扩展
通过集成第三方库,开发者可以扩展DJI无人机的功能,以实现特定应用的需求,如图像处理、数据分析等。
### 4.2.1 第三方库的集成方法
集成第三方库涉及对无人机SDK的深入了解以及对第三方库的兼容性分析。通常,开发者需要遵循第三方库提供的集成文档,并在项目中适当地配置。
#### 代码块示例
以集成OpenCV库用于图像处理为例,展示基本的集成方法。
```gradle
// 在build.gradle文件中添加OpenCV库的依赖
dependencies {
implementation 'org.opencv:opencv-android:4.5.1'
}
```
#### 代码块逻辑分析
- 在Android项目的`build.gradle`文件中添加OpenCV库的依赖项。
- 添加的依赖项确保了在构建项目时能够下载并包含OpenCV库。
- 之后,可以在项目中引用OpenCV的相关类和方法进行图像处理。
### 4.2.2 扩展功能模块的实现
扩展功能模块的实现需要明确目标功能,并选择合适的第三方库或自行开发相应的模块。
#### 表格示例
下面的表格列出了几种可能的扩展功能以及相应的集成方法:
| 功能需求 | 第三方库/方法推荐 | 集成方法说明 |
|---------------------|------------------|--------------|
| 图像识别 | OpenCV | 通过Gradle添加依赖,直接使用库中的功能 |
| 数据分析 | Pandas for Python| 在Python环境中安装库,利用库进行数据分析 |
| 自然语言处理 | NLTK | 使用pip安装库,在应用中引入并使用相关模块 |
### 4.3 无人机集群控制
无人机集群控制是通过软件系统来协调多架无人机,以执行协同任务。这种控制方式可极大提升任务执行的效率和范围。
#### 4.3.1 集群控制理论基础
集群控制依赖于高效的通信协议、精确的时间同步机制和复杂的决策算法。
#### 代码块示例
以下代码是集群中单个无人机的任务执行逻辑示例。
```python
import threading
def execute_mission(无人机对象):
while not 无人机对象.is_mission_finished():
# 读取无人机状态
state = 无人机对象.get_status()
# 根据状态决定下一步动作
if state == "NEEDS_RECOVERY":
无人机对象.recover()
elif state == "READY_TO_PERFORM":
无人机对象.perform_mission()
# 同步到集群的时间基准
time.sleep(0.1)
# 为每个无人机创建并启动执行任务的线程
for drone in drone_fleet:
t = threading.Thread(target=execute_mission, args=(drone,))
t.daemon = True
t.start()
```
#### 代码块逻辑分析
- `execute_mission`函数接收一个无人机对象作为参数,并进入一个循环,持续检查无人机的任务状态。
- 如果无人机状态为`NEEDS_RECOVERY`,则执行恢复操作;如果是`READY_TO_PERFORM`,则开始执行任务。
- 使用线程确保每个无人机可以并行执行任务。
- 使用时间同步机制来确保集群中所有无人机的时间保持一致。
#### mermaid格式流程图
下图为无人机集群任务执行的流程图:
```mermaid
graph LR
A[开始集群任务] --> B{无人机状态检查}
B -->|未完成任务| C[执行恢复操作]
B -->|准备执行| D[开始执行任务]
B -->|任务已完成| E[退出循环]
C --> B
D --> B
```
在上述流程图中,我们可以看到集群控制流程的关键步骤,包括初始化任务、检查无人机状态、执行相应操作,并返回检查无人机状态的步骤,从而形成循环。
# 5. 项目实战与优化策略
## 5.1 开发流程与项目管理
无人机项目的开发流程通常包括需求分析、设计、编码、测试和部署等关键阶段。项目管理的核心目标是确保按时按质完成项目,同时控制成本和管理风险。
### 5.1.1 项目规划与进度控制
在项目启动阶段,项目经理需要制定详细的项目计划。这包括项目范围定义、工作分解结构(WBS)、时间线规划、资源分配和风险评估。使用项目管理工具如JIRA或Trello可以帮助团队成员理解各自的任务,跟踪进度并及时反馈。
```mermaid
gantt
title 无人机项目开发时间线
section 设计阶段
需求分析 :done, des1, 2023-03-01, 2023-03-10
系统架构设计 :active, des2, 2023-03-11, 10d
section 编码阶段
控制算法开发 :des3, 2023-03-22, 20d
图像处理模块 :des4, after des3, 15d
section 测试阶段
单元测试 :des5, 2023-04-16, 10d
集成测试 :des6, after des5, 10d
section 部署阶段
系统部署 :des7, 2023-05-07, 5d
用户培训与文档编写 :des8, after des7, 10d
```
### 5.1.2 质量保证与测试策略
为了保证项目质量,需要引入持续集成/持续部署(CI/CD)流程。同时,进行详尽的单元测试、集成测试、系统测试和用户接受测试(UAT)来发现和解决问题。自动化测试框架如Selenium或Appium能够提高测试效率。
## 5.2 性能优化与故障排除
无人机在实际应用中可能遇到性能瓶颈,因此性能优化是一个持续的过程。故障排除则要求开发人员对可能的异常情况有充分的了解,并及时响应。
### 5.2.1 常见性能瓶颈分析
性能瓶颈可能出现在多个层面,包括但不限于计算资源、数据传输和电池使用效率。通过监控工具和分析软件可以帮助识别瓶颈所在。
```markdown
- **计算资源瓶颈**
- CPU使用率高导致指令处理延迟
- 内存泄漏问题导致程序运行缓慢
- **数据传输瓶颈**
- 图像和视频数据流过大,造成网络拥塞
- 数据处理算法效率低,增加处理时间
- **电池使用效率**
- 高能耗任务导致电池快速耗尽
- 不合理的电源管理导致能量浪费
```
### 5.2.2 故障诊断与解决方案
故障诊断的关键是能够准确复现问题,并通过日志分析、系统调试工具来定位故障原因。解决方案可能包括代码优化、系统架构调整或更换硬件组件。
## 5.3 成果展示与未来展望
项目完成后,进行成果展示是展示团队工作的关键环节。同时,分析和分享成功案例的经验,有助于把握技术趋势和市场方向。
### 5.3.1 成功案例分析与经验分享
通过案例研究可以总结无人机在特定领域的应用效果。成功案例的分析应关注解决方案的核心技术、实施过程中的挑战以及最终的业务成果。
### 5.3.2 技术趋势与市场潜力展望
无人机技术的发展与应用领域不断拓宽,从农业监测到影视拍摄,再到灾害应对和物流配送。技术趋势如人工智能和5G通信的结合将进一步推动无人机的应用和发展。
```mermaid
graph LR
A[无人机应用领域] --> B[农业监测]
A --> C[影视拍摄]
A --> D[灾害应对]
A --> E[物流配送]
```
以上章节内容聚焦于实战案例分析,深入探讨了无人机项目的开发流程、性能优化以及未来展望,为IT专业人士提供了一个完整的学习路径和应用视角。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《大疆 Mobile SDK DJI 开发文档》专栏是一个全面的指南,旨在帮助开发者掌握 DJI Mobile SDK 的核心技术,构建高效的无人机开发项目。该专栏涵盖了从入门到精通的各个方面,包括工具包组件、实战技巧、飞行控制算法、视频流管理、定位导航、避障技术、多机协同、自主飞行任务构建、SDK 扩展和插件开发、系统稳定性提升、用户界面定制、云服务整合、移动设备连接以及代码示例和高级编程技巧。通过阅读本专栏,开发者可以获得全面深入的知识,打造定制化、高性能的无人机应用。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
揭秘QPSK:从基础到性能优化的全指南(附案例分析)
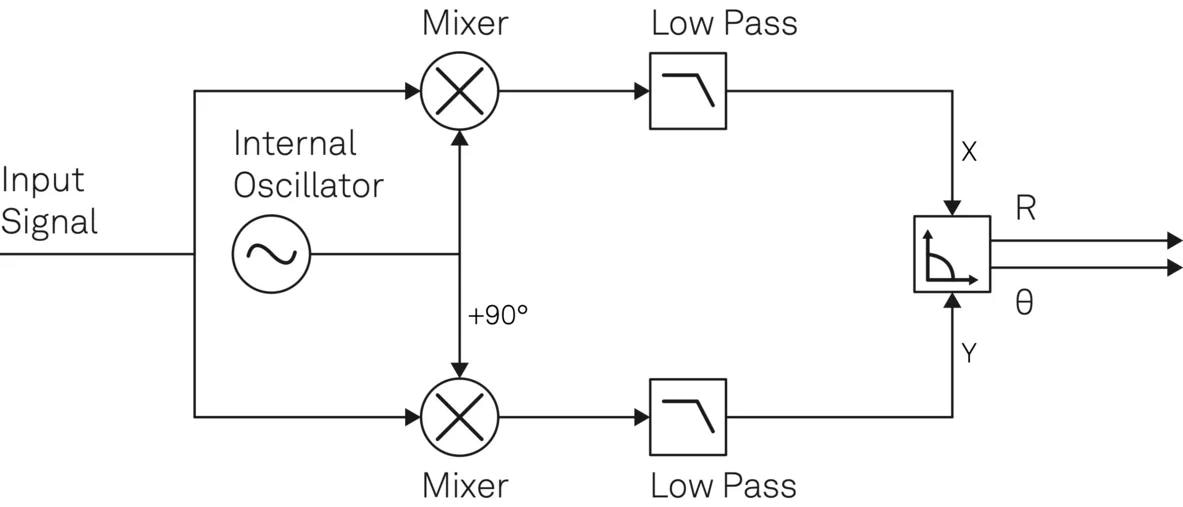
# 摘要
QPSK(Quadrature Phase Shift Keying)调制是一种广泛应用于数字通信系统中的调制技术,它通过改变载波的相位来传输数字信息,具备较高的频谱效率和传输速率。本文从基本原理入手,深入分析了QPSK信号的构成、特点及与其它调制技术的比较,并探讨了其数学模型和在不同通信系统中的实现方法。通过理论性能分
剪映中的音频处理
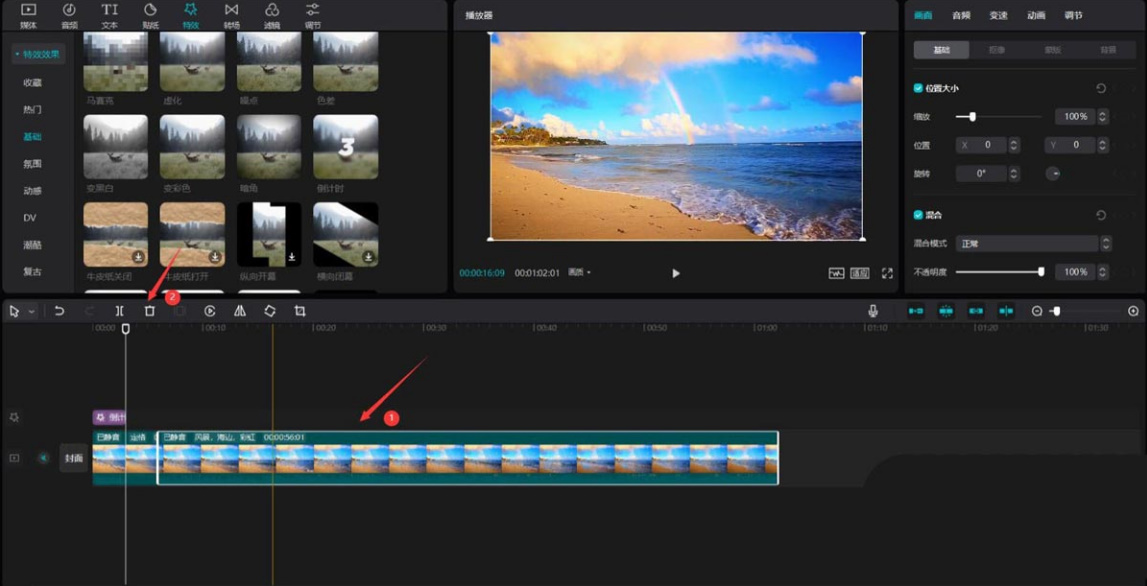
# 摘要
本文详细探讨了剪映软件中音频处理的理论与实践技巧。首先介绍了剪映中音频处理的基础知识和理论基础,包括音频的数字信号处理、音频文件格式以及音频处理的术语如采样率、位深度、频率响应和动态范围。接着,文章深入讲解了剪映音频编辑中的基本剪辑操作、音效应用、降噪与回声消除等技巧。进阶技巧部分,探讨了音频自动化的应用、创意音频设计以及音频问题的诊断与修复。最后,通过具体的应用案例分析了如何在剪映中创建声音背景、处理人声配音以
【ABAP与JSON交互的优化策略】:提高数据处理效率的字段名映射方法
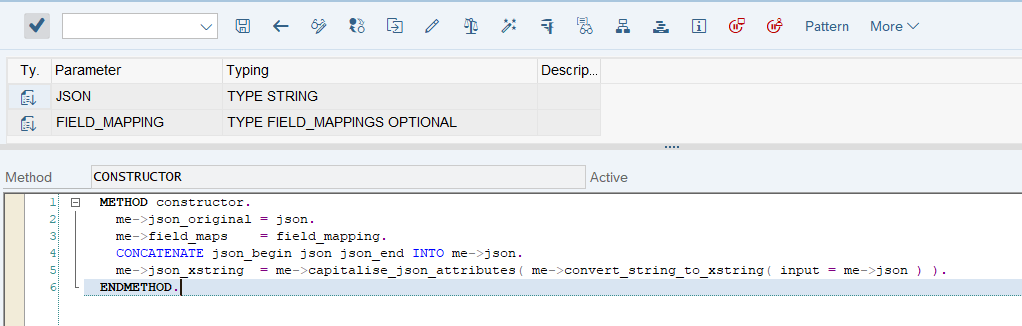
# 摘要
本文旨在介绍ABAP与JSON之间的交互机制,探讨JSON数据结构与ABAP数据类型之间的映射方法,并提供字段名映射的实现技术与应用策略。文章深入分析了基础数据结构,阐述了字段名映射的理论基础、实现原理以及性能优化策略。此外,本文还探讨了高级数据处理技术、交互性能提升和自动化集成的策略,通过案例分析分享最佳实践,为ABAP开发者提供了一个全面的JSON交互指南。
# 关键字
ABAP;J
中控标Access3.5新手必读:一步步带你安装及配置门禁系统

# 摘要
本文全面介绍了门禁系统的基础知识、中控标Access3.5的安装与配置流程,以及日常管理与维护的方法。首先,概述了门禁系统的基础知识,为读者提供了必要的背景信息。接着,详细阐述了中控标Access3.5的安装步骤,包括系统需求分析、安装前准备以及安装过程中的关键操作和常见问题解决方案。之后,文章深入讲解了系统配置指南,涵盖了数据库配置、
【rockusb.inf解码】:10个常见错误及其解决方案

# 摘要
本文围绕rockusb.inf文件的概述、错误诊断、检测与修复、案例剖析以及预防与维护进行了系统性的探讨。首先介绍了rockusb.inf文件的基本功能和结构,然后深入分析了语法错误、配置错误和系统兼容性问题等常见错误类型。通过详细阐述错误
Rsoft仿真网格划分技术:理论+操作=专家级指南
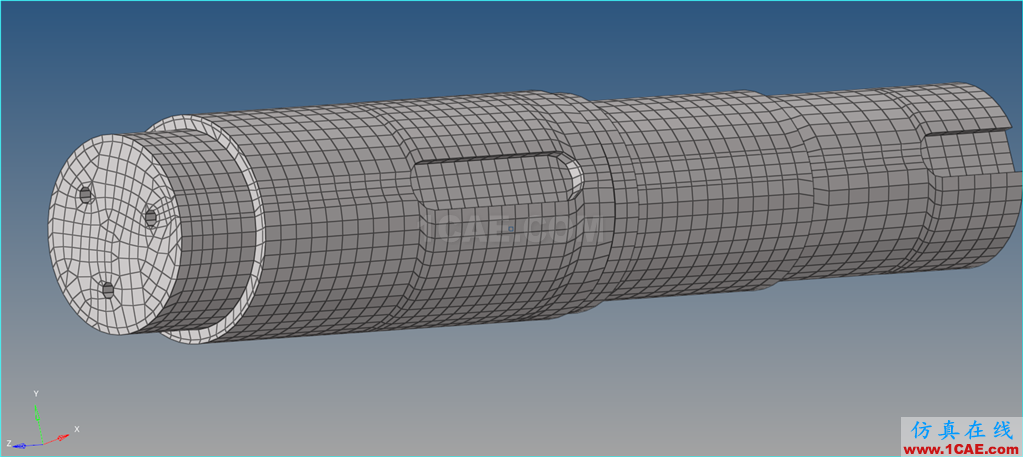
# 摘要
随着计算仿真的发展,网格划分技术作为其中的关键环节,其准确性和效率直接影响仿真结果的质量和应用范围。本文对Rsoft仿真软件中的网格划分技术进行了全面概述,从基础理论到操作实践,再到高级应用和优化技巧,进行了系统的探讨。通过对网格划分的数学基础、技术原理及质量评估进行深入分析,文章进一步展示了如何在Rsoft软件中进行有效的网格划分操作,并结合行业案例,探讨了网格划分在半导体和生物医疗行业中的实
电力系统继电保护仿真深度剖析:ETAP软件应用全攻略
# 摘要
本文旨在详细介绍电力系统继电保护的基础知识、ETAP软件的操作与仿真分析实践,以及继电保护的优化和高级仿真案例研究。首先,概述了电力系统继电保护的基本原理和重要性。接着,对ETAP软件的界面布局、设备建模和仿真功能进行了详细介绍,强调了其在电力系统设计与分析中的实用性和灵活性。在继电保护仿真分析实践章节中,本文阐述了设置仿真、运行分析以及系统优化
高级数据结构深度解析:和积算法的现代应用
# 摘要
本文系统介绍了和积算法的基本概念、理论框架以及其在数据分析和机器学习中的应用。首先,概述了和积算法的起源和核心数学原理,随后探讨了该算法的优化策略,包括时间和空间复杂度的分析,并举例展示了优化实践。接着,文章详细阐述了和积算法在数据预处理、复杂数据集处理和模式识别中的具体应用。在机器学习领域,本文对比了和积算法与传统算法,探讨了它与深度学习的结合
台湾新代数控API接口初探:0基础快速掌握数控数据采集要点
# 摘要
本文旨在深入解析台湾新代数控API接口的理论与实践应用。首先介绍了数控API接口的基本概念、作用以及其在数控系统中的重要性。接着,文章详细阐述了数控API接口的通信协议、数据采集与处理的相关理论知识,为实践操作打下坚实的理论基础。随后,文章通过实践前的准备、数据采集代码实现以及数据处理与存储三个方面,分享了数据采集实践的具体步骤与技巧。进一步地,文章探讨了数
FANUC外部轴性能优化:揭秘配置技巧,提升加工精度
# 摘要
本文系统介绍了FANUC外部轴的基础知识、配置理论、性能优化实践、编程应用以及加工效率提升方法,并展望了外部轴技术的发展趋势。通过对外部轴的类型与功能进行阐述,详细分析了其在加工中心的应用及控制系统。进一步,本文探讨了同步控制机制以及性能优化的技巧,包括精度提升、动态性能调优和故障诊断策略。文章还针对外部轴编程进行了深入
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )