单片机PWM波形分析:掌握波形特征,诊断故障
发布时间: 2024-07-13 15:09:51 阅读量: 65 订阅数: 40 
# 1. 单片机PWM波形的概念和原理**
脉宽调制(PWM)是一种数字信号调制技术,通过改变脉冲的宽度来控制输出电压或电流的平均值。在单片机系统中,PWM波形广泛应用于电机控制、LED亮度调节、伺服电机控制等领域。
PWM波形的基本原理是将一个周期性的方波信号的脉冲宽度进行调制,从而改变输出信号的平均值。脉冲宽度占整个周期时间的比例称为占空比,占空比越大,输出信号的平均值越高。
PWM波形的频率和占空比可以通过单片机的定时器和比较器模块进行控制。定时器模块负责产生周期性的方波信号,比较器模块负责将输入信号与参考信号进行比较,并输出一个控制信号,该控制信号用于控制输出信号的脉冲宽度。
# 2. 单片机PWM波形的测量和分析
### 2.1 PWM波形的测量方法
PWM波形的测量方法主要有示波器测量和逻辑分析仪测量。
**2.1.1 示波器测量**
示波器是一种电子测量仪器,可以显示电信号的波形。使用示波器测量PWM波形时,需要将示波器的探头连接到PWM信号的输出端。示波器的显示屏上会显示PWM波形的波形图。
**代码块:**
```python
import numpy as np
import matplotlib.pyplot as plt
# 生成一个PWM波形
pwm_signal = np.array([0, 1, 1, 0, 1, 1, 0, 1])
# 使用matplotlib绘制PWM波形
plt.plot(pwm_signal)
plt.xlabel("Time")
plt.ylabel("Amplitude")
plt.title("PWM Waveform")
plt.show()
```
**逻辑分析**
逻辑分析仪是一种电子测量仪器,可以捕获和分析数字信号。使用逻辑分析仪测量PWM波形时,需要将逻辑分析仪的探头连接到PWM信号的输出端。逻辑分析仪会显示PWM波形的时序图。
**代码块:**
```python
import numpy as np
import matplotlib.pyplot as plt
# 生成一个PWM波形
pwm_signal = np.array([0, 1, 1, 0, 1, 1, 0, 1])
# 使用matplotlib绘制PWM波形
plt.plot(pwm_signal)
plt.xlabel("Time")
plt.ylabel("Amplitude")
plt.title("PWM Waveform")
plt.show()
```
### 2.2 PWM波形的分析指标
PWM波形的分析指标主要有占空比、频率和波形失真。
**2.2.1 占空比**
占空比是指PWM波形中高电平的时间占整个周期时间的百分比。占空比可以通过示波器或逻辑分析仪测量。
**代码块:**
```python
import numpy as np
# 生成一个PWM波形
pwm_signal = np.array([0, 1, 1, 0, 1, 1, 0, 1])
# 计算占空比
duty_cycle = np.mean(pwm_signal) * 100
print("Duty cycle:", duty_cycle)
```
**2.2.2 频率**
频率是指PWM波形在一个周期内重复出现的次数。频率可以通过示波器或逻辑分析仪测量。
**代码块:**
```python
import numpy as np
# 生成一个PWM波形
pwm_signal = np.array([0, 1, 1, 0, 1, 1, 0, 1])
# 计算频率
frequency = 1 / np.mean(np.diff(np.where(pwm_signal == 1)[0]))
print("Frequency:", frequency)
```
**2.2.3 波形失真**
波形失真是指PWM波形与理想波形的偏差程度。波形失真可以通过示波器或逻辑分析仪测量。
**代码块:**
```python
import numpy as np
# 生成一个PWM波形
pwm_signal = np.array([0, 1, 1, 0, 1, 1, 0, 1])
# 计算波形失真
distortion = np.max(np.abs(pwm_signal - np.mean(pwm_signal))) / np.mean(pwm_signal)
print("Distortion:", distortion)
```
# 3. 单片机PWM波形的故障诊断**
### 3.1 PWM波形异常的常见原因
PWM波形异常的原因可以分为硬件故障和软件故障两大类。
#### 3.1.1 硬件故障
* **电源故障:**电源电压不稳定或纹波过大,会导致PWM波形失真或频率不稳定。
* **时钟故障:**时钟信号不稳定或频率不准确,会导致PWM波形频率不稳定或波形失真

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《单片机PWM控制的基本原理》专栏深入探讨了脉宽调制(PWM)控制在各种应用场景中的基本原理和应用技巧。从入门到精通,专栏揭秘了PWM调速原理、死区时间设置、波形分析、系统设计等核心知识。此外,专栏还涵盖了PWM控制在电机控制、LED驱动、功率电子、工业自动化、医疗设备、航空航天、汽车电子、可再生能源、智能家居、机器人、物联网、通信系统、图像处理、音频处理和视频处理等领域的广泛应用。通过深入浅出的讲解和丰富的案例分析,专栏帮助读者全面掌握PWM控制技术,解锁其在各种实际应用中的潜力。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
台达PLC编程常见错误剖析:新手到专家的防错指南
参考资源链接:[台达PLC ST编程语言详解:从入门到精通](https://wenku.csdn.net/doc/6401ad1acce7214c316ee4d4?spm=1055.2635.3001.10343)
# 1. 台达PLC编程简介
台达PLC(Programmable Logic Controller)
高程测量误差控制全攻略:精准测量与误差最小化秘籍

参考资源链接:[GnssLevelHight:高精度高程拟合工具](https://wenku.csdn.net/doc/6412b6bdbe7fbd1778d47cee?spm=1055.2635.3001.10343)
# 1. 高程测量误差控制概述
高程测量误差控制是测绘学中一项关键的实践活动,它确保了通过测量获得的数据具有高精度和高可靠性。误差控制不仅仅是一个技术操作问题,它还涉及到如何对整个测量过程进行科学管理和质量
【三菱PLC程序调试秘籍】:GX Works3中的调试技巧,让问题无所遁形

参考资源链接:[三菱GX Works3编程手册:安全操作与应用指南](https://wenku.csdn.net/doc/645da0e195996c03ac442695?spm=1055.2635.3001.10343)
# 1. 三菱PL
【PN532与物联网设备集成】:智能场景应用,一触即发

参考资源链接:[PN532固件V1.6详细教程:集成NFC通信模块指南](https://wenku.csdn.net/doc/6412b4cabe7fbd1778d40d3d?spm=1055.2635.3001.10343)
# 1. PN532概述及其在物联网中的作用
## 1.1 PN532简介
PN532是由恩智浦半导体开发的一款高度集成的NFC控制器,它能够执行多种无线通信功能,包括读取RFID标签、实现无线充电以及进行点对点通信等。PN5
【Allegro性能提升】:PIN_delay调优对高速接口性能的影响,性能飞跃
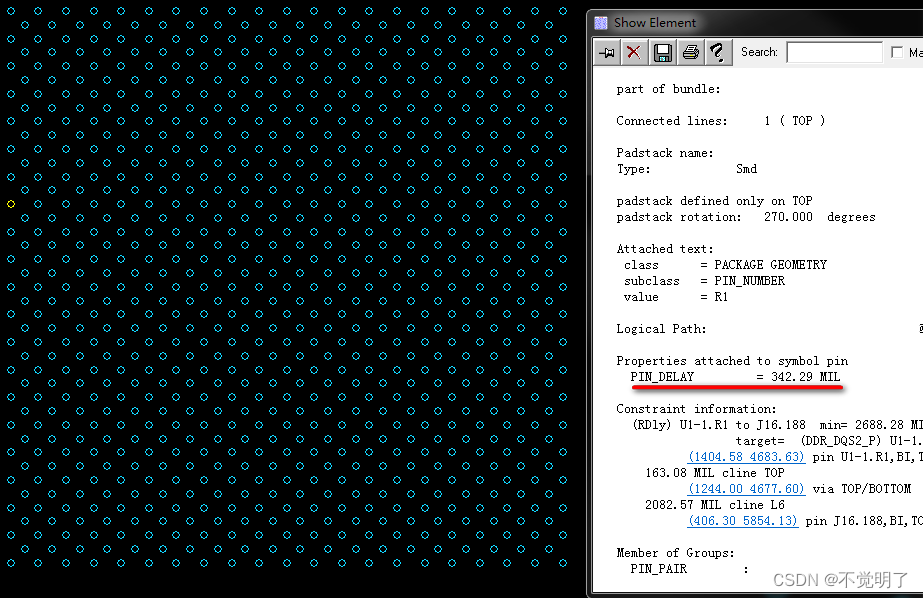
参考资源链接:[Allegro添加PIN_delay至高速信号的详细教程](https://wenku.csdn.net/doc/6412b6c8be7fbd1778d47f6b?spm=1055.2635.3001.10343)
# 1. PIN_delay与高速接口性能基础
在现代IT系统中,随着数据传输速率的不断提高,高速接口的设计与优化变得日益重要。本章将探讨高速接
【跨平台GBFF文件解析】:兼容性问题的终极解决方案

参考资源链接:[解读GBFF:GenBank数据的核心指南](https://wenku.csdn.net/doc/3cym1yyhqv?spm=1055.2635.3001.10343)
# 1. 跨平台文件解析的挑战与GBFF格式
跨平台应用在现代社会已经成为一种常态,这不仅仅表现在不同操作系统之间的兼容,还包括不同硬件平台以及网络环境。在文件解析这一层面,
【自定义宏故障处理】:发那科机器人灵活性与稳定性并存之道
参考资源链接:[发那科机器人SRVO-037(IMSTP)与PROF-017(从机断开)故障处理办法.docx](https://wenku.csdn.net/doc/6412b7a1be7fbd1778d4afd1?spm=1055.2635.3001.10343)
# 1. 发那科机器人自定义宏概述
自定义宏是发那科机器人编程中的一个强大工具,它允许用户通过参数化编程来简化重复性任务和复杂逻辑
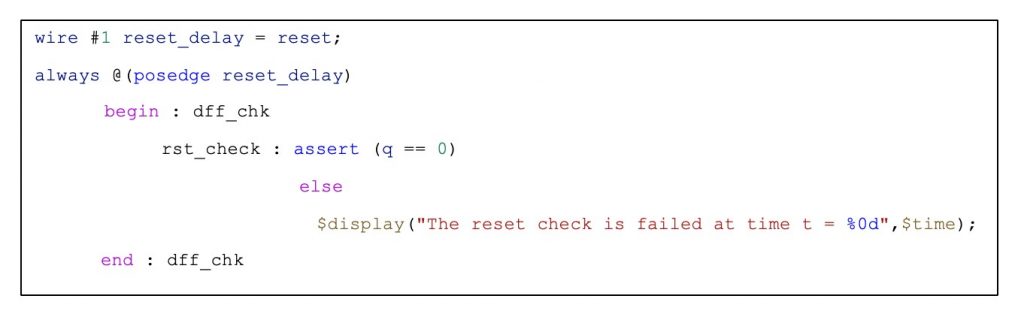
SystemVerilog习题高级篇:深化理解与系统化学习方法
参考资源链接:[SystemVerilog验证:绿皮书第三版课后习题解答](https://wenku.csdn.net/doc/644b7ea5ea0840391e5597b3?spm=1055.2635.3001.10343)
# 1. SystemVerilog习题高级篇概述
SystemVerilog作为硬件描述语言的集大
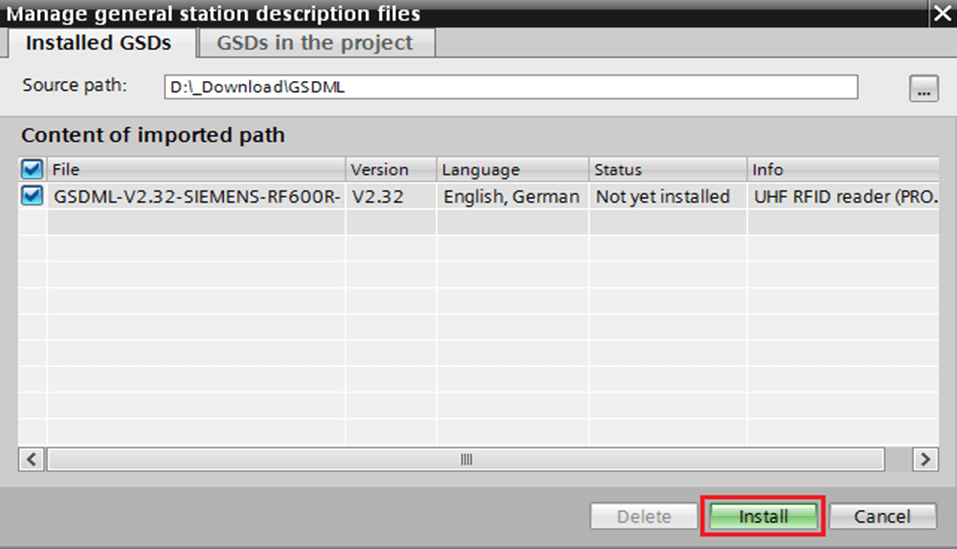
STEP7 GSD文件安装:解决权限、安全设置与依赖性冲突
参考资源链接:[解决STEP7中GSD安装失败问题:解除引用后重装](https://wenku.csdn.net/doc/6412b5fdbe7fbd1778d451c0?spm=1055.2635.3001.10343)
# 1. STEP7 GSD文件安装概述
在工业自动化领域,STEP7 GSD文件扮演着至关重
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )