【设备驱动开发入门】:手把手教你写第一行驱动代码
发布时间: 2024-12-17 08:36:59 阅读量: 8 订阅数: 15 

少儿编程分享:手把手教你用Python编写March英雄守卫(二).pdf
参考资源链接:[电子元件库Miscellaneous Devices.Intlib详解](https://wenku.csdn.net/doc/6him5trdou?spm=1055.2635.3001.10343)
# 1. 设备驱动开发简介
## 1.1 设备驱动开发的重要性
在操作系统与硬件设备的交互过程中,设备驱动扮演着至关重要的角色。它为上层应用提供了访问硬件资源的接口,同时屏蔽了硬件的复杂性。驱动程序的稳定性和性能直接影响到整个系统的运行效率。因此,设备驱动开发是计算机科学领域的一个关键而复杂的课题。
## 1.2 设备驱动开发的范畴
设备驱动开发主要关注的是如何通过操作系统内核与硬件设备进行沟通。它包括了硬件设备的初始化、数据的接收与发送、设备的卸载等操作。开发者需要深入了解硬件特性及操作系统的内核机制,同时具备良好的编程技巧。
## 1.3 驱动开发的挑战
在设备驱动开发的过程中,开发者需要面对许多挑战。如确保代码的健壮性、处理并发访问、优化性能、及时响应外部事件等。此外,不同版本的操作系统对驱动程序有着不同的要求,需要开发者不断更新知识库。
接下来的章节将逐步深入探讨Linux内核的基础知识、设备驱动的结构以及编写驱动程序的具体步骤,帮助读者逐步构建起设备驱动开发的整体知识架构。
# 2. Linux内核基础与驱动结构
## 2.1 Linux内核概述
Linux内核是操作系统的核心,它负责管理系统的硬件资源、为应用程序提供系统调用接口(API)以及维护系统的运行。由于Linux的开放性,其内核设计允许开发者在遵循一定规范的前提下,编写设备驱动来扩展硬件支持。
### 2.1.1 内核的组成与模块化
Linux内核由若干主要组件构成,包括进程调度、内存管理、文件系统、网络堆栈和设备驱动。模块化设计是Linux内核的关键特性之一,它允许在不重新编译整个内核的情况下添加或移除驱动。
模块化设计使得驱动开发更加便捷,内核模块可以在系统运行时动态加载和卸载,极大地方便了系统的维护和扩展。驱动开发者可以专注于硬件特定的代码,而不必了解内核的全部细节。
### 2.1.2 内核与用户空间的交互
用户空间和内核空间的交互主要通过系统调用和设备文件进行。系统调用提供了一组标准的接口,用户空间的应用程序可以通过这些接口请求内核提供服务。设备文件是一种特殊的文件,位于/dev目录下,通过它,用户空间的应用程序可以访问硬件设备。
设备文件分为字符设备和块设备。字符设备提供连续的数据流访问,而块设备则提供随机数据访问。Linux通过设备号区分不同的设备,并通过设备文件实现对设备的抽象访问。
## 2.2 设备驱动在内核中的角色
设备驱动是连接硬件和内核的桥梁。它们提供了一组标准化的接口,使得内核能够与各种类型的硬件进行通信。
### 2.2.1 驱动程序与硬件通信的机制
驱动程序通过一系列标准化的函数与硬件进行通信。这些函数包括初始化硬件、读写操作、中断处理以及硬件资源的管理等。硬件制造商通常提供硬件的详细技术文档,以便开发者可以正确地实现这些函数。
### 2.2.2 驱动类型与分类
按照功能的不同,驱动程序主要分为字符设备驱动和块设备驱动,以及网络设备驱动。字符设备驱动通常用于键盘、鼠标等输入设备,块设备驱动则用于硬盘、SSD等存储设备。网络设备驱动负责管理网络接口,如以太网卡和无线网卡。
驱动类型的不同,其编程模型和使用场景也有所不同。例如,字符设备驱动通常需要实现文件操作接口,而块设备驱动则需要实现底层的块读写逻辑。
## 2.3 驱动程序的基本结构
驱动程序的基本结构包括模块的加载与卸载函数,以及设备号和设备文件的管理。
### 2.3.1 模块加载与卸载函数
Linux内核模块的加载和卸载函数分别是`module_init()`和`module_exit()`。这两个函数分别定义了模块加载和卸载时需要执行的操作。加载函数负责初始化驱动,包括注册设备号和设备文件;卸载函数则进行相反的操作,释放资源并注销设备。
### 2.3.2 设备号和设备文件
每个设备驱动在内核中都会注册一个唯一的主设备号和一个或多个次设备号。这些设备号是驱动与用户空间进行交互的标识。用户空间通过`mknod`命令创建设备文件,这些文件与内核中的设备号关联。
设备驱动程序通过`register_chrdev()`或`alloc_chrdev_region()`等函数注册设备号,并通过`cdev_add()`来添加字符设备。
下面提供一个简单的字符设备驱动的代码示例,展示了如何注册设备号和加载卸载函数:
```c
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#define DEVICE_NAME "example"
#define MAJOR_NUM 100
static int __init example_init(void) {
int result = register_chrdev(MAJOR_NUM, DEVICE_NAME, &fops);
if (result < 0) {
printk(KERN_ALERT "Example: register_chrdev failed\n");
return result;
}
printk(KERN_INFO "Example: device registered with major number %d\n", MAJOR_NUM);
return 0;
}
static void __exit example_exit(void) {
unregister_chrdev(MAJOR_NUM, DEVICE_NAME);
printk(KERN_INFO "Example: module unloaded\n");
}
module_init(example_init);
module_exit(example_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Your Name");
MODULE_DESCRIPTION("A simple example Linux module.");
MODULE_VERSION("0.01");
```
以上代码段展示了字符设备驱动的加载和卸载函数的实现。代码中的`__init`和`__exit`宏分别标记了初始化和清理函数,这是Linux内核模块编程中的一种约定,用于优化内核内存使用。`fops`是一个指向文件操作结构体的指针,包含了驱动实现的各种文件操作函数。
驱动程序的基本结构是驱动开发的基石,它为上层应用提供设备抽象和访问接口,使得Linux系统能够灵活地支持多样化的硬件设备。随着学习的深入,我们将了解如何在这些基础之上构建复杂的驱动功能。
# 3. 编写第一个字符设备驱动
Linux字符设备驱动程序是内核与用户空间进行数据交换的一种方式。本章节将介绍如何编写一个简单的字符设备驱动,从而让你了解内核空间与用户空间的交互机制。我们将通过设备注册和注销、文件操作接口的实现、内存管理以及用户空间的交互等关键点来构建驱动程序框架。
## 3.1 字符设备驱动框架
字符设备驱动框架为字符设备提供了注册和注销的机制。设备注册将设备信息添加到内核中,而注销则是将设备信息从内核中移除。这一机制是通过文件操作接口实现,允许用户程序通过标准的系统调用与字符设备进行交互。
### 3.1.1 设备注册和注销
注册一个字符设备通常涉及调用`register_chrdev`或`alloc_chrdev_region`以及`cdev_add`函数。注销设备时则使用`cdev_del`和`unregister_chrdev_region`。这些函数提供了管理字符设备所需的所有功能。
**代码示例:**
```c
#include <linux/cdev.h>
#include <linux/fs.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/slab.h>
#define DEVICE_NAME "mychardev"
#define CLASS_NAME "mychar"
static int majorNumber;
static struct class* charClass = NULL;
static struct cdev charCdev;
static int __init char_init(void) {
printk(KERN_INFO "%s: Initializing the chardev\n", DEVICE_NAME);
// Try to dynamically allocate a major number for the device
majorNumber = register_chrdev(0, DEVICE_NAME, &fops);
if (majorNumber < 0) {
printk(KERN_ALERT "%s: Failed to register a major number\n", DEVICE_NAME);
return majorNumber;
}
printk(KERN_INFO "%s: Registered correctly with major number %d\n", DEVICE_NAME, majorNumber);
// Register the device class
charClass = class_create(THIS_MODULE, CLASS_NAME);
if (IS_ERR(charClass)) {
unregister_chrdev(majorNumber, DEVICE_NAME);
printk(KERN_ALERT "%s: Failed to register device class\n", DEVICE_NAME);
return PTR_ERR(charClass);
}
printk(KERN_INFO "%s: Device class registered correctly\n", DEVICE_NAME);
// Register the device driver
if (IS_ERR(device_create(charClass, NULL, MKDEV(majorNumber, 0), NULL, DEVICE_NAME))) {
class_destroy(charClass);
unregister_chrdev(majorNumber, DEVICE_NAME);
printk(KERN_ALERT "%s: Failed to create the device\n", DEVICE_NAME);
return PTR_ERR(charClass);
}
printk(KERN_INFO "%s: Device class created correctly\n", DEVICE_NAME);
return 0;
}
static void __exit char_exit(void) {
device_destroy(charClass, MKDEV(majorNumber, 0));
class_unregister(charClass);
class_destroy(charClass);
cdev_del(&charCdev);
unregister_chrdev(majorNumber, DEVICE_NAME);
printk(KERN_INFO "%s: Goodbye from the LKM!\n", DEVICE_NAME);
}
// 注册初始化和退出函数到内核
module_init(char_init);
module_exit(char_exit);
```
### 3.1.2 文件操作接口的实现
文件操作接口定义在`file_operations`结构体中,该结构体包含了一系列指针,每个指针指向一个特定的函数,如`open()`, `release()`, `read()`, `write()`等。你需要填充这个结构体,提供这些函数的具体实现。
**代码示例:**
```c
static struct file_operations fops = {
.open = char_open,
.read = char_read,
.write = char_write,
.release = char_release,
};
```
## 3.2 驱动程序中的内存管理
在驱动程序中进行内存管理是必要的,因为字符设备驱动经常需要在内核空间和用户空间之间传输数据。Linux内核提供了多种内存分配和释放方法,以及内存映射,来方便地实现这一点。
### 3.2.1 分配与释放内存的方法
内核中分配和释放内存主要使用`kmalloc`和`kfree`函数。`kmalloc`类似于用户空间的`malloc`,而`kfree`用于释放由`kmalloc`分配的内存。
**代码示例:**
```c
void* buffer = kmalloc(1024, GFP_KERNEL);
// ... 使用buffer进行操作
kfree(buffer);
```
### 3.2.2 内存映射(mmap)
内存映射允许用户程序将设备内存映射到其地址空间,从而可以直接通过指针访问设备内存。这可以通过设置`file_operations`结构体中的`mmap`函数指针实现。
**代码示例:**
```c
static int char_mmap(struct file *file, struct vm_area_struct *vma) {
unsigned long start = vma->vm_start;
unsigned long size = vma->vm_end - vma->vm_start;
unsigned long page = __get_free_page(GFP_KERNEL);
unsigned long iter;
vma->vm_flags |= VM_DONTEXPAND | VM_DONTDUMP;
vma->vm_private_data = (void*)page;
for (iter = 0; iter < size; iter += PAGE_SIZE) {
void *mem = (void*)(page + iter);
if (remap_pfn_range(vma, start + iter, virt_to_phys(mem) >> PAGE_SHIFT, PAGE_SIZE, PAGE_SHARED)) {
free_page(page);
return -EAGAIN;
}
}
return 0;
}
```
## 3.3 驱动与用户空间的交互
字符设备驱动需要实现与用户空间程序交互的机制。最常见的方式是通过`read()`, `write()`系统调用的实现,以及通过内存映射或缓冲区管理。
### 3.3.1 read()和write()系统调用的实现
`read()`和`write()`函数是文件操作接口中非常核心的部分,允许用户程序通过标准的文件操作读取和写入数据。
**代码示例:**
```c
static ssize_t char_read(struct file *filp, char __user *buf, size_t count, loff_t *offp) {
// 实现读取逻辑
}
static ssize_t char_write(struct file *filp, const char __user *buf, size_t count, loff_t *offp) {
// 实现写入逻辑
}
```
### 3.3.2 缓冲区管理
缓冲区管理通常涉及对用户程序提供的缓冲区进行复制。这可以通过`copy_to_user()`和`copy_from_user()`函数实现。它们安全地将数据从内核空间复制到用户空间,反之亦然。
**代码示例:**
```c
char* kernel_buffer = kmalloc(1024, GFP_KERNEL);
copy_to_user(buf, kernel_buffer, 1024);
```
通过以上章节,我们已经介绍了字符设备驱动开发的关键步骤和概念。接下来的章节将继续深入内核驱动的高级特性,包括中断处理、设备树解析以及并发控制等内容。在了解了这些高级特性之后,你将具备编写复杂内核驱动的能力。
# 4. 深入理解设备驱动的高级特性
在本章中,我们将深入探讨Linux设备驱动开发中的一些高级概念,这将帮助读者更好地理解内核如何处理硬件事件、如何解析硬件配置信息以及如何进行并发控制等关键问题。
## 4.1 中断处理与下半部(Bottom Half)
中断是处理器响应硬件事件的一种机制。当中断发生时,处理器会暂停当前任务,保存状态,并跳转到预先设定的中断服务例程中去处理中断。Linux内核为了提高效率,将中断处理分为两个部分:中断处理程序(Top Half)和下半部(Bottom Half)。中断处理程序负责尽快完成硬件中断的响应,而下半部则负责稍后完成的耗时工作。
### 4.1.1 中断上下文和任务上下文
当中断发生时,内核进入中断上下文,这时的内核代码运行在处理器的最高优先级。在这个上下文中,内核代码必须尽可能快地完成任务,以最小化对系统性能的影响。与中断上下文不同的是任务上下文,在这种上下文中,内核可以执行调度和其他时间消耗较多的操作。
### 4.1.2 中断处理程序的编写
编写中断处理程序需要理解内核的中断机制和API。例如,`request_irq()`函数用于注册一个中断处理程序。这个函数需要指定一个中断号、处理函数、标志、设备名以及该设备使用的共享资源信息。当处理程序被调用时,它需要快速返回,因此,处理程序通常会启动下半部处理。
```c
#include <linux/interrupt.h>
static irqreturn_t my_irq_handler(int irq, void *dev_id) {
// 释放共享资源等操作
// 启动下半部,比如通过标记一个任务队列
return IRQ_HANDLED; // 标识中断已处理
}
static int __init my_irq_init(void) {
return request_irq(IRQ_NUMBER, my_irq_handler, IRQF_SHARED, "my_device", NULL);
}
static void __exit my_irq_exit(void) {
free_irq(IRQ_NUMBER, my_irq_handler);
}
module_init(my_irq_init);
module_exit(my_irq_exit);
```
### 4.1.3 工作队列和软中断
下半部处理可以使用多种机制,其中工作队列和软中断是两种常用的方法。工作队列将任务放到一个内核线程中去异步执行,适合执行耗时较长的任务。软中断是内核中的一种特定的下半部机制,适用于需要快速处理的场合。
## 4.2 设备树(Device Tree)的解析
随着ARM架构的流行,设备树成为描述硬件信息的一种标准方式,尤其是在嵌入式系统中。设备树是一种数据结构,用以描述硬件设备的信息,它为系统提供了硬件的层次化描述,使得内核在启动时能够了解硬件的布局。
### 4.2.1 设备树的作用与结构
设备树由一系列节点组成,每个节点代表一个设备,节点中包含了该设备的属性信息。设备树的结构定义了硬件的拓扑结构,包括总线、设备和它们之间的连接关系。
### 4.2.2 在驱动中解析设备树
在驱动程序中,可以使用设备树的API来解析硬件信息。比如`of_property_read_u32`用于读取整数类型的属性值,而`of_get_property`则用于获取属性的值字符串。
```c
const void *prop;
u32 value;
prop = of_get_property(np, "my-property", NULL);
if (prop) {
if (of_property_read_u32(np, "my-property", &value) == 0) {
// 使用prop指向的字符串或者value变量中读取的值
}
}
```
## 4.3 驱动程序的并发控制
在多任务操作系统中,多个进程可能会同时访问同一个资源,这需要在驱动程序中进行适当的并发控制。为了避免数据不一致和其他并发问题,内核提供了多种机制,如原子操作、自旋锁、互斥锁等。
### 4.3.1 原子操作和位操作
原子操作提供了不可分割的指令执行,这对于实现计数器或状态检查等操作非常有用。内核提供了原子操作的API,例如`atomic_inc`和`atomic_dec`用于原子地增减一个值。
### 4.3.2 自旋锁和互斥锁
自旋锁(spinlock)和互斥锁(mutex)用于同步对共享资源的访问。自旋锁在锁未获取时会持续占用处理器,而互斥锁在无法获取锁时会让出处理器。互斥锁适用于可能睡眠的场景,而自旋锁适用于短期锁定。
```c
spinlock_t my_lock = SPIN_LOCK_UNLOCKED;
unsigned long flags;
spin_lock_irqsave(&my_lock, flags);
// 对共享资源进行操作
spin_unlock_irqrestore(&my_lock, flags);
```
在本章节中,我们详细分析了中断处理、设备树解析和并发控制的高级概念及其在驱动开发中的应用。这些高级特性是驱动开发人员必须掌握的,因为它们直接关系到驱动程序的稳定性和效率。理解这些内容,对于编写健壮的驱动程序至关重要。
# 5. 驱动程序调试与测试技巧
## 5.1 使用printk进行日志记录
### 日志级别和格式化输出
在Linux内核中,`printk`是类似于用户空间的`printf`函数,但它用于内核空间的日志记录。`printk`函数允许开发者输出调试信息到内核的环形缓冲区(ring buffer),这个缓冲区的内容可以通过`dmesg`命令查看。日志级别指示了消息的严重性,范围从`KERN_EMERG`(紧急)到`KERN_DEBUG`(调试信息)。合理使用日志级别可以帮助开发者过滤掉不重要的消息,关注于那些关键的日志信息。
```c
#include <linux/kernel.h>
#include <linux/module.h>
static int __init my_init(void) {
printk(KERN_INFO "This is an informational message\n");
return 0;
}
static void __exit my_exit(void) {
printk(KERN_ERR "This is an error message\n");
}
module_init(my_init);
module_exit(my_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Your Name");
MODULE_DESCRIPTION("Example module with printk");
```
在上面的代码中,`KERN_INFO`和`KERN_ERR`分别指定了消息级别。编译并加载这个模块后,可以通过`dmesg`来查看这些消息。
### 利用dmesg查看日志
`dmesg`是一个非常有用的工具,它显示内核环形缓冲区中的消息。缓冲区有大小限制,旧的消息会被新的覆盖。使用`dmesg`可以重定向日志到文件中,便于后续分析。
```shell
# 查看内核消息
dmesg
# 将内核消息保存到文件
dmesg > kernel_messages.txt
```
对于复杂的驱动程序,我们通常会设置多个`printk`消息,用于在不同的代码路径上捕获关键信息。日志级别必须根据调试过程中的需要进行调整,例如,在开发阶段可能需要更详细的`KERN_DEBUG`级别日志,而在生产环境中可能只保留`KERN_ERR`级别的警告和错误信息。
## 5.2 使用内核调试器kgdb
### kgdb的配置与使用
`kgdb`(Kernel Debugging)是Linux内核的调试器,它允许开发者在内核级别进行断点、单步执行和变量检查等操作。要使用`kgdb`,需要在编译内核时启用`CONFIG_KGDB`配置选项,并且需要两台机器:一台作为调试器宿主机,另一台作为被调试的目标机。配置`kgdb`之后,可以通过串行线或网络连接来进行调试。
编译内核时启用`kgdb`和相关配置选项的代码示例如下:
```shell
make menuconfig
```
在配置菜单中选择如下选项:
```
Kernel hacking --->
[*] KGDB: kernel debugger
[*] KGDB: use kgdb over the serial console
```
调试过程中,宿主机上的`gdb`通过串行端口或网络接口连接到目标机。`kgdb`通过串行端口与宿主机上的`gdb`通信,从而实现对内核代码的调试。下面是基本的`kgdb`调试会话的步骤:
```shell
# 在宿主机上启动gdb
gdb ./vmlinux
# 连接kgdb到目标机串行端口
(gdb) target remote /dev/ttyS0
```
### 调试过程中的常见操作
一旦`kgdb`连接建立,用户就可以设置断点、查看和修改变量、执行单步调试等。这些操作对于理解驱动程序在内核中的行为非常有用,特别是在复杂场景下。下面是一些调试过程中的常见操作:
```gdb
# 设置断点
(gdb) break do_fork
# 查看当前函数的调用栈
(gdb) bt
# 查看特定变量的值
(gdb) print *current
# 单步执行
(gdb) step
# 继续执行
(gdb) continue
```
使用`kgdb`可以非常细致地观察驱动程序的行为,比如在发生异常或错误时,可以精确地定位到引发问题的代码行。这对于问题诊断和驱动程序的稳定性的提升非常有帮助。
## 5.3 驱动的性能分析与优化
### 性能分析工具简介
在驱动开发过程中,性能分析是不可或缺的一个环节。性能分析可以帮助我们识别瓶颈、优化算法、减少延迟和提升吞吐量。Linux内核提供了多种性能分析工具,如`perf`、`ftrace`和`SystemTap`等。
- `perf`是Linux内核性能分析工具集,它可以用来分析CPU利用率、指令执行情况、缓存使用、分支预测等。使用`perf`可以进行采样分析和硬件计数器分析。
- `ftrace`是内核提供的一个函数跟踪器,可以用于跟踪内核函数的调用和执行时间。`ftrace`支持多种跟踪器,如函数跟踪、函数图跟踪、动态事件跟踪等。
- `SystemTap`是一个更高级的工具,允许开发者编写复杂的脚本来监控和分析内核的运行时行为。尽管它比`ftrace`和`perf`使用起来更为复杂,但功能也更加强大。
### 优化策略和最佳实践
性能优化通常遵循以下步骤:
1. **确定瓶颈**:首先需要使用性能分析工具来识别代码中的性能瓶颈。
2. **量化改进**:对性能优化前后进行定量测试,确保优化措施带来了预期的改进。
3. **代码优化**:针对识别出的瓶颈进行代码优化。常见的代码优化方法包括减少上下文切换、优化数据结构、减少锁的使用和优化算法。
4. **测试与验证**:优化之后需要进行充分的测试,确保优化没有引入新的问题。
5. **持续迭代**:性能优化往往需要多次迭代,每次迭代都会带来性能的提升。
例如,通过`perf`工具分析,我们发现在某驱动程序中,某个函数调用非常频繁,导致性能问题。接下来的优化策略可能包括:
- 减少该函数的调用次数
- 优化该函数内部算法,减少计算量
- 重写相关代码部分,利用更高效的数据结构或算法
下面是一个使用`perf`进行函数调用频率分析的示例:
```shell
# 记录当前系统的性能数据
sudo perf record -F 99 -a -g -- sleep 10
# 使用perf report查看调用频率最高的函数
sudo perf report
```
通过分析`perf report`的输出,我们可以发现哪些函数或模块是热点,从而进行针对性的优化。
综上所述,`printk`、`kgdb`以及性能分析工具都是驱动程序开发中重要的调试和测试手段。正确地利用这些工具能够帮助开发者更好地理解驱动程序的行为,进行问题诊断,并通过数据驱动的优化提升驱动程序的性能和稳定性。
# 6. 实战:开发一个USB设备驱动
## 6.1 USB驱动框架概述
### 6.1.1 USB设备的工作原理
USB(通用串行总线)是一种连接外部设备的通信标准,其设备工作原理是通过四线电缆(两根用于供电,两根用于数据传输)进行数据交换和设备供电。USB设备在连接时会经历一系列的枚举过程,以识别设备并加载相应的驱动程序。数据传输采用批量、中断或等时传输方式,以适应不同类型设备的需求。
### 6.1.2 USB驱动的主要组件
USB驱动程序主要由USB核心、USB设备驱动程序和USB主机控制器驱动程序三部分组成。USB核心提供通用的API以供设备驱动程序调用,负责设备的枚举和与USB设备通信。USB设备驱动程序负责实现特定USB设备的通信协议和数据处理。USB主机控制器驱动程序负责管理USB总线和与核心的交互。
## 6.2 USB设备的枚举过程
### 6.2.1 设备的识别和配置
当USB设备插入主机时,主机通过一系列的步骤来识别和配置新设备。这一过程包括:地址分配、端点探测、描述符获取和设备驱动程序的选择。首先,设备被分配一个唯一的地址,然后主机查询设备以获取其配置信息,并通过读取设备描述符来了解设备类型、支持的接口和端点信息。最后,根据设备信息和已安装的驱动程序,选择最合适的驱动程序进行加载。
### 6.2.2 端点和管道的管理
USB设备的每个端点都是数据传输的单一通道,具有特定的方向和传输类型(如批量、中断或等时)。端点0通常用于初始的枚举过程。管道是在设备端点和主机端驱动程序之间建立的逻辑连接,负责实际数据的传输。一个管道包括端点的地址、方向、传输类型和最大数据包大小等参数。驱动程序负责管理这些管道,并确保数据在端点之间正确传输。
## 6.3 编写USB驱动代码
### 6.3.1 设备的初始化和退出
编写USB驱动需要初始化USB核心,注册USB设备,并设置设备的接口和端点。以下是一个简单的初始化和退出函数的例子:
```c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/usb.h>
static int usb_device_probe(struct usb_interface *interface, const struct usb_device_id *id)
{
printk(KERN_INFO "USB device (%04X:%04X) plugged\n", id->idVendor, id->idProduct);
return 0;
}
static void usb_device_disconnect(struct usb_interface *interface)
{
printk(KERN_INFO "USB device removed\n");
}
static struct usb_device_id usb_device_id_table[] = {
{ USB_DEVICE(VID, PID) }, // VID 和 PID 需要替换为具体的厂商ID和产品ID
{}
};
MODULE_DEVICE_TABLE(usb, usb_device_id_table);
static struct usb_driver usb_device_driver = {
.name = "example_usb_driver",
.id_table = usb_device_id_table,
.probe = usb_device_probe,
.disconnect = usb_device_disconnect,
};
static int __init usb_driver_init(void)
{
return usb_register(&usb_device_driver);
}
static void __exit usb_driver_exit(void)
{
usb_deregister(&usb_device_driver);
}
module_init(usb_driver_init);
module_exit(usb_driver_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Your Name");
MODULE_DESCRIPTION("A simple USB device driver");
```
### 6.3.2 数据传输的实现
数据传输部分需要实现相应接口的打开、释放、提交和完成处理函数。以bulk传输为例,以下是实现数据提交的代码:
```c
static int usb_device_bulk_transfer(struct usb_device *udev, unsigned char endpoint, char *data, int length, int *transferred)
{
int retval;
retval = usb_bulk_msg(udev,
usb_rcvbulkpipe(udev, endpoint),
data,
length,
transferred,
5000); // timeout in milliseconds
if (retval) {
printk(KERN_ERR "Bulk message failed: %d", retval);
return -EIO;
}
return 0;
}
// 在驱动的适当位置调用 usb_device_bulk_transfer 函数提交数据
```
在编写实际的驱动代码时,还需要考虑错误处理、数据缓存管理、并发控制等更多高级特性。在完成驱动程序开发后,开发者可以通过内核模块加载工具(如 `insmod` 和 `rmmod`)来加载和卸载驱动模块进行测试。
由于驱动程序的开发涉及到系统的稳定性和安全性,开发者在测试阶段需要特别注意驱动程序的行为,确保在所有情况下系统都能保持稳定。通过持续的测试和优化,最终可以开发出健壮的USB驱动程序。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
"Miscellaneous Devices" 专栏是一份全面的指南,涵盖杂项设备驱动开发的各个方面。它从编写第一行驱动代码的基础知识开始,深入探讨了字符设备和块设备之间的差异、设备注册和管理机制、以及自定义杂项设备驱动的构建。专栏还提供了对设备文件操作、中断处理、同步机制、电源管理、性能优化、安全性分析、异常处理、模块化设计、嵌入式系统应用、跨平台开发和兼容性测试的深入见解。通过循序渐进的讲解和丰富的示例,本专栏为读者提供了全面了解杂项设备驱动开发所需的关键知识和技能。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Zynq裸机开发之LWIP初始化:细节与注意事项

# 摘要
本文对Zynq平台裸机开发环境下LWIP协议栈的应用进行了深入研究。首先概述了Zynq平台与裸机开发的基本概念,随后介绍了LWIP协议栈架构、核心功能模块及其与网络通信基础的关系。重点分析了LWIP的初始化流程,包括准备工作、代码实现以及后续的检查与测试步骤。此外,详细探讨了LWIP在Zynq平台上的实际应用、定制与优化策略,并通过案例分析,展示了如何诊断和解决集成过程中的问题。最后,展望了Zyn
【终极解决方案】:彻底根除编辑器中的文件乱码问题

# 摘要
文件乱码现象是数字信息交换过程中普遍存在的问题,它不仅影响文本的可读性,还可能导致数据的误读和信息的失真。本论文首先对字符编码的基础理论进行了阐述,并分析了乱码现象对数据交换和存储的影响。随后,本论文深入探讨了编码标准的理论,并从技术角度剖析了乱码产生的原因。在此基础上,提出了预防和解决乱码问题的实践策略,包括编辑器和开发环境配置、网络传输与存储过程中的编码管理,以及编程语言中的编码处理技巧。此外,本文还介绍了高
平面口径天线增益优化:案例分析,设计到实现的全攻略
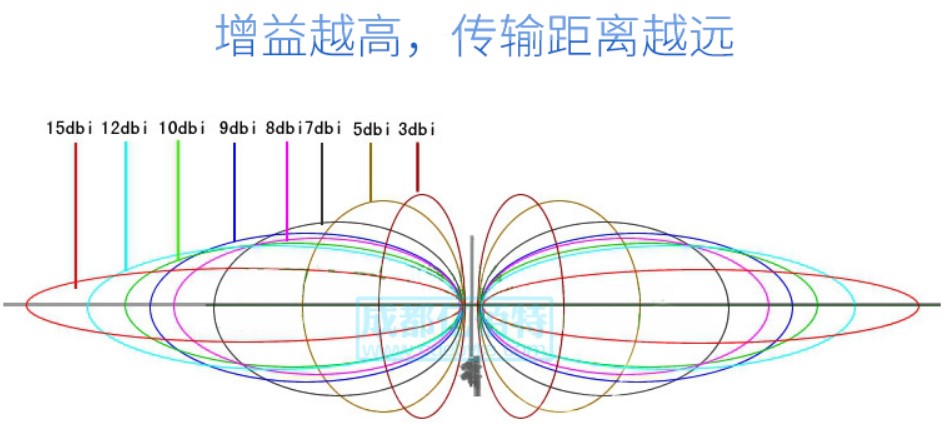
# 摘要
平面口径天线作为无线通信系统的重要组成部分,其增益性能直接影响信号覆盖与质量。本文系统地阐述了平面口径天线增益的基础知识、优化理论以及设计与实施过程。从增益的基础概念、理论模型、计算方法到设计实践中的案例分析与验证调试,再到增益优化的实战技巧和未来展望,本文全面覆盖了平面口径天线增益提升的关键技术和应用策略。特别地,本文还展望了新材料、人工智能技术在平面口径天线增益优化中的潜在应用,以及5G与毫米波技术下天线
非接触卡片故障诊断:APDU指令常见错误快速解决方案
# 摘要
本文全面介绍了非接触卡片技术及其应用中的APDU指令集,涵盖了APDU指令结构、分类、通信流程、错误处理等方面的知识。通过深入分析APDU指令在不同场景中的应用实例,文章提供了故障诊断技巧和常见错误的解决方案,强调了预防性维护与性能优化的重要性。本文还探讨了非接触卡片系统集成与测试的策略,包括系统兼容性评估、环境配置、性能测试及优化。通过对这些关键内容的阐述,本文旨在为开发者提供一个关于非接触卡片技术及其在系统集成和维护中的应用指南,以促进该技术的高效运用和管理。
# 关键字
非接触卡片;APDU指令集;故障诊断;错误处理;系统集成;性能优化
参考资源链接:[非接触卡片APDU指
【定制化数据交换协议】:昆仑通态触摸屏与PLC高级配置指南

# 摘要
本文首先概述了定制化数据交换协议的理论基础,并详细介绍了昆仑通态触摸屏与PLC通讯的技术细节,包括通讯协议的定义、类型、硬件与软件连接方式、以及测试与故障排查方法。接着,文章深入探讨了定制化数据交换协议的设计原则和实现方法,并提供了应用案例以分析协议实施的效果。此外,本文还探讨了昆仑通态触摸屏的高级配置理论与实践,以及与PLC的联动配置。最后,本文详细阐述了通讯故障的诊断、
STAR CCM+流道抽取软件更新:新版本必看功能亮点与实战应用

# 摘要
本文对STAR CCM+流道抽取软件的新版本功能进行了深入分析。首先概述了软件的改进,包括用户界面优化和操作体验的提升。接着详细介绍了高级网格生成技术的增强、多相流和粒子模型的支持、以及性能和稳定性的显著提升。实战应用案例分析部分展示了新版本在流
金蝶云星空自定义报表设计与分析:打造数据驱动的决策力!

# 摘要
本文全面阐述了金蝶云星空自定义报表的设计、实践与高级应用,旨在帮助用户充分利用报表系统进行有效决策。首先介绍了自定义报表的基础理论,包括企业报表系统的作用、自定义报表的设计原则以及数据模型理论。随后,文章深入探讨了报表设计的实践操作,如模板创建、自定义字段与公式设定,以及格式化与美化技术。此外,本文还探讨了数据分析方法,包括数据挖掘、多维分析和趋势预测。最后,通过案例分析,
CST816D中断系统全攻略:打造高效响应机制与优先级优化

# 摘要
本文详细介绍了CST816D中断系统的工作原理与实践应用,首先概述了中断系统的基本概念、中断响应机制的理论基础和中断优先级理论。随后,文章通过配置中断向量表、编写中断服务例程和中断屏蔽等实践步骤,阐述了如何优化CST816D中断系统的配置。文章还深入探讨了中断优先级的优化策略、中断嵌套与协作机制,并提供了故障排查与调试的有效方法。最后,本文展望了CST816D中断系统在嵌入式开发和实时操
故障排除秘籍:QSGMII接口问题快速诊断与解决

# 摘要
QSGMII接口技术是高速网络通信的关键组成部分,它在维持高吞吐量和减少布线需求方面发挥了重要作用。然而,QSGMII接口也可能遭受各种故障,这些故障可由硬件问题、软件配置错误或性能瓶颈引起。本文对QSGMII接口技术及其故障类型进行了全面概述,并深入探讨了故障诊断工具与方法,提供了具体的排查实践和案例分析。此外,本文提出了一系列解决方案,包括软件更新、硬件升级以及性能优化建议,并展望了故障排除的未来趋
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )