【PyTorch深度强化学习】:精通DQN与DDPG算法(专家级攻略)
发布时间: 2024-12-11 22:06:25 阅读量: 17 订阅数: 17 

基于pytorch深度强化学习的PPO,DQN,SAC,DDPG等算法实现python源码.zip

# 1. 深度强化学习基础
在深度强化学习(DRL)的领域中,我们探讨了智能体(agent)如何通过与环境(environment)的交互来学习最优策略(policy)。智能体的目标是最大化其累积奖励(cumulative rewards),通常通过试错(trial-and-error)的过程来进行学习。强化学习框架主要由以下三部分构成:状态(states)、动作(actions)和奖励(rewards)。
## 状态、动作和奖励
- 状态是智能体所处环境的描述。它可以是一个简单的数值,也可以是复杂的数据结构,如图像或其他传感器输入。
- 动作是智能体可以执行的操作,用于影响环境状态。
- 奖励是智能体每次采取动作后从环境中获得的反馈信号,其目的是引导智能体学习如何选择动作以获得最大奖励。
## 马尔可夫决策过程(MDP)
深度强化学习的理论基础之一是马尔可夫决策过程(MDP),这是一种数学模型,用于描述决策问题。在MDP中,智能体的决策过程可以用以下四个元素来描述:状态集合、动作集合、状态转移概率分布以及奖励函数。
## 学习算法
深度强化学习将传统强化学习算法与深度学习相结合,特别适合处理高维状态和动作空间的问题。常见的深度强化学习算法包括深度Q网络(DQN)、策略梯度(Policy Gradient)方法和深度确定性策略梯度(DDPG)算法等。
通过这些基础概念,我们为后续章节深入探讨具体的实现方法和应用案例打下了基础。
# 2. PyTorch深度强化学习实践
## 2.1 PyTorch基础与安装
### 2.1.1 PyTorch概述
PyTorch是一个开源的机器学习库,基于Python语言,主要适用于计算机视觉和自然语言处理等深度学习领域。它以其易用性、灵活性和动态计算图特性在研究和工业界广泛应用。PyTorch主要提供了两个高级特性:`Tensors`和`Autograd`,分别用于表示多维数组和自动计算梯度。由于其动态计算图的特性,PyTorch允许开发者更直观地构建复杂的模型,易于调试和研究。
PyTorch的设计理念是使动态神经网络成为可能,能够更高效地处理那些固定结构的传统框架难以应对的问题。其背后的设计哲学是“从研究到生产”,意味着它能够从初步的原型开发,一直扩展到生产环境。
PyTorch还支持分布式计算,包括CPU和GPU的并行化计算,使得大规模的数据处理和模型训练成为可能。此外,PyTorch还提供了一个名为Torchvision的包,专门用于图像和视频处理,提供了包括预训练模型、图像转换、数据集等工具。
### 2.1.2 安装PyTorch与环境配置
安装PyTorch时需要考虑使用的操作系统、Python版本、CUDA版本(如果需要GPU加速)等多个因素。安装步骤通常包括选择合适的PyTorch版本和下载安装包。安装方法可以分为使用包管理器和手动安装。
使用包管理器安装是最简单的方法,比如使用Python的包管理工具`pip`。对于不同的操作系统和环境,PyTorch官方网站提供了详细的安装指令。
以在Windows系统上安装为例,如果需要GPU支持的版本,可以使用以下命令安装:
```bash
pip install torch===1.8.0 torchvision===0.9.0 -f https://download.pytorch.org/whl/torch_stable.html
```
对于Linux系统,如果需要CUDA 10.2的支持,可以使用:
```bash
pip install torch==1.8.0+cu102 torchvision==0.9.0+cu102 -f https://download.pytorch.org/whl/torch_stable.html
```
安装完成后,可以通过运行Python代码来测试PyTorch是否安装成功:
```python
import torch
print(torch.__version__)
```
确保安装无误后,接下来需要配置PyTorch的环境。这包括设置合适的环境变量,例如`PYTHONPATH`,确保Python可以找到PyTorch库。对于需要进行GPU计算的用户,还需要安装CUDA和对应的cuDNN库。对于深度学习项目,通常还会需要使用深度学习框架以外的其他库,如NumPy、Pandas等进行数据处理,这些都可以通过`pip`命令安装。
配置好环境后,推荐使用虚拟环境管理工具如`conda`或`virtualenv`来隔离项目的依赖库,确保不同项目之间的依赖不会相互干扰。这样,就完成了PyTorch的基础安装和环境配置,可以开始使用PyTorch进行深度学习的实践了。
# 3. 深度确定性策略梯度(DDPG)算法详解
## 3.1 DDPG算法原理
### 3.1.1 深度强化学习的actor-critic框架
在深度强化学习中,actor-critic框架是一种常见的算法架构,它将智能体(agent)分为两部分:actor(行为者)和critic(评价者)。Actor负责根据当前策略选择动作,而Critic则负责评估当前策略的好坏。在DDPG算法中,这两部分都使用深度神经网络来实现,因此称之为深度确定性策略梯度(Deep Deterministic Policy Gradient)。
Actor-Critic框架的一个主要优势在于它能够高效地利用样本数据,因为Critic能够学习评估策略的好坏,从而为Actor提供更加准确的动作选择指导。在DDPG中,这种指导表现为梯度信息,它指引Actor网络如何改进策略以增加预期的回报。
### 3.1.2 DDPG算法的工作机制
DDPG算法是一种off-policy的actor-critic算法,也就是说它利用了过去的经验来学习当前的策略。具体来说,DDPG通过以下机制工作:
- **经验回放(Experience Replay)**:DDPG使用一个回放缓冲区(replay buffer)来存储智能体的转移(transitions),即状态、动作、奖励和新的状态的四元组。这样做可以打破样本间的时间相关性,并允许算法在多个训练步骤中重复使用样本。
- **目标网络(Target Networks)**:DDPG使用目标网络来稳定学习过程。这些网络是主网络的滞后版本,它们的参数只在一定周期后才从主网络同步。
- **确定性策略(Deterministic Policy)**:DDPG中的策略是确定性的,这意味着对于给定的状态,它输出一个特定的动作,而不是动作的概率分布。
DDPG通过不断迭代更新Actor和Critic网络的参数,来学习一种能够最大化预期回报的确定性策略。
## 3.2 PyTorch中的DDPG实现
### 3.2.1 DDPG的关键组件
在PyTorch中实现DDPG算法需要构建以下几个关键组件:
- **Actor网络**:一个确定性策略网络,输出最优动作。
- **Critic网络**:一个价值网络,评估给定状态和动作对的价值。
- **经验回放机制**:一个回放缓冲区,用于存储历史转移并打破数据间的时间相关性。
- **目标网络**:用于稳定学习过程的 Actor 和 Critic 的滞后版本。
### 3.2.2 从代码角度解析DDPG
以下是一个简化的DDPG算法实现示例,它展示了如何使用PyTorch构建Actor和Critic网络。请注意,完整的代码会更复杂,并需要额外的训练循环、超参数调整和环境交互逻辑。
```python
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
class Actor(nn.Module):
def __init__(self, state_dim, action_dim, hidden_dim):
super(Actor, self).__init__()
self.fc1 = nn.Linear(state_dim, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, action_dim)
def forward(self, x):
x = torch.relu(self.fc1(x))
return torch.tanh(self.fc2(x)) # 输出动作值在[-1, 1]范围内
class Critic(nn.Module):
def __init__(self, state_dim, action_dim, hidden_dim):
super(Critic, self).__init__()
self.fc1 = nn.Linear(state_dim + action_dim, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, 1)
def forward(self, x, a):
x = torch.cat([x, a], 1)
x = torch.relu(self.fc1(x))
return self.fc2(x) # 输出价值估计
# 假设状态维度为4,动作维度为2,隐藏层维度为256
actor = Actor(4, 2, 256)
critic = Critic(4, 2, 256)
# 初始化优化器
actor_optimizer = optim.Adam(actor.parameters(), lr=1e-4)
critic_optimizer = optim.Adam(critic.parameters(), lr=1e-4)
```
在上面的代码中,我们定义了两个神经网络类`Actor`和`Critic`。`Actor`网络负责输出给定状态下的最优动作,而`Critic`网络负责评估给定状态和动作的价值。两者都使用了线性层和非线性激活函数ReLU。
## 3.3 DDPG算法的优化策略
### 3.3.1 经验回放机制
为了使DDPG算法更高效,经验回放机制是关键组成部分之一。通过存储智能体在与环境交互过程中收集的数据(状态、动作、奖励和新状态),经验回放允许智能体在不同的时间步骤中重复利用这些数据,这有助于打破数据间的时间相关性并提高数据利用率。
### 3.3.2 目标网络更新策略
在DDPG中,目标网络的更新至关重要,因为它帮助稳定训练过程。通常,目标网络的参数是通过软更新(soft update)来获得的,即:
```python
def soft_update(target, source, tau):
for target_param, param in zip(target.parameters(), source.parameters()):
target_param.data.copy_(target_param.data * (1.0 - tau) + param.data * tau)
```
其中`tau`是一个介于0到1之间的值,它决定了目标网络参数更新的速度。
总结来说,DDPG算法通过其独特的actor-critic框架、经验回放机制和目标网络,提供了一种有效的策略梯度方法来解决连续动作空间中的强化学习问题。在实现和优化过程中,理解这些关键组件对构建一个成功的DDPG模型至关重要。
# 4. PyTorch强化学习应用案例
## 4.1 经典游戏环境下的应用
### 4.1.1 OpenAI Gym的介绍
OpenAI Gym 是一个用于开发和比较强化学习算法的工具包。它提供了许多不同的环境,从简单的二维网格游戏到复杂的3D模拟环境,如Atari游戏和MuJoCo机器人模拟器。Gym 的设计使得它易于添加新的环境,同时它的接口标准化也方便了强化学习算法的开发和测试。
每个环境都遵循一个标准的接口,即观测空间(observation space)和动作空间(action space)。观测空间定义了智能体可以观察到的状态,而动作空间定义了智能体可以采取的动作。这些环境同时提供方法来重置环境(reset)和执行动作(step),以及记录视频和日志的功能。
Gym 的优势在于它极大地降低了强化学习研究的门槛,使得研究者可以快速实验和比较不同的算法,而无需花费时间构建或适配环境。同时,它也是教育和学习强化学习一个非常有价值的资源。
### 4.1.2 实现DQN在Gym环境中的应用
在PyTorch中实现DQN算法并应用到Gym环境,我们需要遵循以下步骤:
- 初始化Gym环境,并设置超参数。
- 创建DQN神经网络模型。
- 实现经验回放机制。
- 定义损失函数和优化器。
- 进行训练循环。
首先,我们需要安装并导入Gym库,然后选择一个环境。以下是一个简单的代码示例,展示如何在Gym的CartPole环境中初始化DQN模型:
```python
import gym
import torch
from torch import nn
from collections import deque
# 初始化Gym环境
env = gym.make("CartPole-v1")
state_size = env.observation_space.shape[0]
action_size = env.action_space.n
# DQN模型定义
class DQN(nn.Module):
def __init__(self):
super(DQN, self).__init__()
self.fc = nn.Sequential(
nn.Linear(state_size, 128),
nn.ReLU(),
nn.Linear(128, action_size)
)
def forward(self, state):
return self.fc(state)
model = DQN()
```
接下来,我们需要实现经验回放机制,这部分代码包括一个经验回放池(ReplayBuffer)和经验回放的逻辑:
```python
class ReplayBuffer:
def __init__(self, buffer_size):
self.buffer = deque(maxlen=buffer_size)
def add(self, state, action, reward, next_state, done):
self.buffer.append((state, action, reward, next_state, done))
def sample(self, batch_size):
# 此处省略采样逻辑,实际操作中需要随机抽取样本
pass
replay_buffer = ReplayBuffer(10000)
```
训练循环会周期性地从回放池中抽取样本,并更新网络的参数。由于训练循环较长,在这里我们仅给出一个大致框架:
```python
for episode in range(num_episodes):
state = env.reset()
for t in count():
action = select_action(state)
next_state, reward, done, _ = env.step(action)
replay_buffer.add(state, action, reward, next_state, done)
state = next_state
if done:
break
if len(replay_buffer.buffer) > batch_size:
for _ in range(update_steps):
states, actions, rewards, next_states, dones = replay_buffer.sample(batch_size)
# 更新网络参数
```
以上是一个非常简化版本的DQN实现。在实践中,你需要处理更多的细节,如动作的选择策略、目标网络的使用、探索与利用的平衡等。
## 4.2 实际问题解决:机器人控制
### 4.2.1 机器人控制问题概述
在机器人控制问题中,目标是训练一个机器人代理(agent)执行复杂的任务,如导航、抓取、行走等。强化学习在这里的应用可以极大地减少手工编程的需要,因为它允许机器人通过与环境的交互来学习策略。
机器人控制问题通常具有高维观测空间和连续的动作空间,这对于强化学习算法是个挑战。因此,深度强化学习,尤其是DDPG算法,因其在连续动作空间问题中的有效性而成为此类问题的常用解决方案。
DDPG结合了深度学习的函数逼近能力和策略梯度方法的策略优化能力,通过一个称为Actor的网络来输出动作,另一个称为Critic的网络来评估动作。Actor的目标是最大化Critic的输出,而Critic的目标是准确地估计动作的价值。
### 4.2.2 应用DDPG解决机器人控制问题
使用DDPG解决机器人控制问题时,我们遵循以下步骤:
- 环境设置与初始化。
- Actor和Critic网络的定义。
- 目标网络的初始化。
- 训练循环的实现。
首先,我们需要定义环境。以一个简单的二维机器人行走环境为例,代码可能如下:
```python
import numpy as np
import gym
from gym import spaces
class RobotEnv(gym.Env):
def __init__(self):
# 定义观测空间和动作空间
self.observation_space = spaces.Box(low=-np.inf, high=np.inf, shape=(4,))
self.action_space = spaces.Box(low=-1, high=1, shape=(2,))
def step(self, action):
# 执行动作,返回新的观测值、奖励、是否完成和额外信息
pass
def reset(self):
# 重置环境,返回初始观测值
pass
env = RobotEnv()
```
接下来,我们定义Actor和Critic网络:
```python
class Actor(nn.Module):
def __init__(self):
super(Actor, self).__init__()
# 定义网络结构
pass
def forward(self, state):
# 根据状态输出动作
pass
class Critic(nn.Module):
def __init__(self):
super(Critic, self).__init__()
# 定义网络结构
pass
def forward(self, state, action):
# 根据状态和动作输出评估值
pass
```
然后,我们需要初始化目标网络,这些网络是Actor和Critic网络的拷贝,用于在训练过程中稳定学习。
```python
target_actor = Actor()
target_critic = Critic()
```
训练循环的实现较为复杂,因为需要同时更新Actor和Critic网络。DDPG的关键在于稳定地处理高维输入和连续动作,这是通过经验回放和目标网络来实现的。
以上步骤给出了一个高层次的DDPG实现概述。在真实情况中,你会需要处理多维数据、连续动作、奖励函数的设计、以及超参数的选择和调优。
为了展示上述内容,我们可以用表格、mermaid流程图和代码块来更清晰地说明DDPG在机器人控制中的应用。
在表格中,我们可以总结不同强化学习算法在机器人控制问题中的优缺点:
| 算法 | 优点 | 缺点 |
| -------------- | ---------------------------------- | ------------------------------------- |
| DQN | 可用于离散动作空间 | 不能直接应用于连续动作空间 |
| DDPG | 可用于连续动作空间 | 较高的样本复杂度,容易过拟合 |
| TRPO | 稳定性高 | 计算成本高 |
| PPO | 稳定性高,样本效率好 | 实现相对复杂 |
接下来是一个mermaid流程图,描述了DDPG的训练过程:
```mermaid
flowchart LR
A[开始训练] --> B[初始化环境和网络]
B --> C[收集经验]
C --> D[存储经验至回放池]
D --> E[从回放池中随机采样]
E --> F[更新Critic网络]
F --> G[更新Actor网络]
G --> H[更新目标网络]
H --> I{是否达到收敛标准}
I -- 是 --> J[结束训练]
I -- 否 --> C
```
最后,以下代码块展示了如何在PyTorch中实现DDPG的一个重要组成部分——目标网络的软更新:
```python
def soft_update(local_model, target_model, tau):
for target_param, local_param in zip(target_model.parameters(), local_model.parameters()):
target_param.data.copy_(tau * local_param.data + (1.0 - tau) * target_param.data)
```
在上述代码中,`tau`是一个参数,决定了目标网络参数更新的速率。通过软更新,我们可以确保目标网络参数平滑地向局部网络参数靠近,从而稳定训练过程。参数`tau`的典型值可能在0.001到0.01之间。
# 5. 深度强化学习的高级话题
## 5.1 模型预测控制(MPC)
模型预测控制(Model Predictive Control, MPC)是一种先进的控制策略,它通过构建一个预测模型来预测未来的系统行为,并在每个控制步骤中求解一个有限时间的最优化问题来生成控制输入。MPC适用于具有复杂动态和约束条件的系统控制问题,已成为深度强化学习中的一种重要方法。
### 5.1.1 MPC的基本概念
MPC的核心思想是在每个时间步都求解一个优化问题,得到一个最优控制序列,然后只实施序列中的第一个控制量。之后,系统状态会更新,然后在新的状态下重复这个过程。这种方法的关键优势在于它能够显式地考虑系统的动态和约束条件。
在深度强化学习的背景下,MPC可以通过以下步骤实现:
1. 利用神经网络构建系统状态的预测模型。
2. 在每个时间步,根据当前系统状态生成一系列未来的控制动作。
3. 使用预测模型计算每个控制序列的未来状态序列。
4. 对这些序列应用一个性能指标(如成本函数),选择最优的控制序列。
5. 实施序列中的第一个控制动作,然后重复整个过程。
### 5.1.2 MPC在深度强化学习中的应用
在深度强化学习中,MPC可以与策略网络结合,提高策略的预测能力和对约束的处理能力。例如,可以使用一个策略网络来输出一系列的控制动作,并将这些动作输入到一个动态模型中预测未来状态。然后,MPC层可以评估这些状态,并选择最佳动作序列实施。
一个典型的MPC与深度强化学习结合的框架通常包括以下几个关键组件:
- **模型网络**:负责预测环境在给定控制输入下的未来状态。
- **优化器**:负责在给定模型和成本函数的基础上,找到最优的控制输入序列。
- **策略网络**:利用MPC层的输出来更新自己的策略参数。
## 5.2 安全性和鲁棒性
安全性和鲁棒性是深度强化学习系统在实际应用中必须考虑的重要因素。没有安全性和鲁棒性的保证,强化学习系统在面对不确定性和变化时可能会失败或产生灾难性后果。
### 5.2.1 安全强化学习的重要性
在许多应用领域,如机器人控制、自动驾驶车辆和工业自动化中,安全问题至关重要。安全强化学习关注如何在学习过程中避免危险行为,确保系统在探索和利用时都保持在安全状态。安全强化学习可以通过设置额外的安全约束来实现,这些约束可以是状态、动作或性能指标的限制。
### 5.2.2 实现鲁棒性强化学习的方法
实现鲁棒性的强化学习方法包括但不限于:
- **安全层**:在强化学习的训练过程中,额外加入一个安全层,以确保在探索过程中不违反安全约束。
- **稳健策略**:通过设计稳健的奖励函数和损失函数,让学习过程自然偏向于安全和稳定的策略。
- **模型预测和不确定性估计**:结合模型预测和不确定性估计,以更好地处理环境中的动态和不确定性,避免危险动作。
通过这些方法,深度强化学习系统可以具备更好的适应性和容错能力,在面对意外事件时能够做出适当反应。
## 5.3 强化学习的未来趋势
随着深度学习和强化学习领域的发展,新的技术和理论层出不穷,极大地推动了强化学习的前沿研究和应用。
### 5.3.1 当前研究的热点
当前研究的热点包括:
- **多智能体强化学习**:研究如何在多个智能体之间进行有效的合作和竞争。
- **元学习和快速适应**:研究如何让强化学习智能体快速适应新环境和任务。
- **解释性和可解释性**:提高模型的透明度,为智能体的行为提供可解释的依据。
### 5.3.2 潜在的发展方向
未来的潜在发展方向可能包括:
- **跨领域和跨模态学习**:通过跨不同领域和模态的学习,提高模型的泛化能力。
- **人机交互**:研究如何使智能体更好地理解和响应人类的意图和行为。
- **计算效率和资源优化**:研究如何减少计算资源消耗,提高算法的计算效率。
深度强化学习仍然处于快速发展阶段,它的应用前景广阔,同时也是充满挑战的领域。随着技术的进步,深度强化学习将继续推动人工智能领域的发展。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
这个专栏提供了 PyTorch 框架中强化学习的全面指南。从入门到高级技术,它涵盖了打造智能代理、环境搭建、策略梯度方法、实战案例、优化策略、状态表示和特征提取等方面。通过深入的分析和实战案例,这个专栏旨在帮助读者掌握 PyTorch 强化学习的精髓,并将其应用于解决实际问题。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
电力电子初学者必看:Simplorer带你从零开始精通IGBT应用
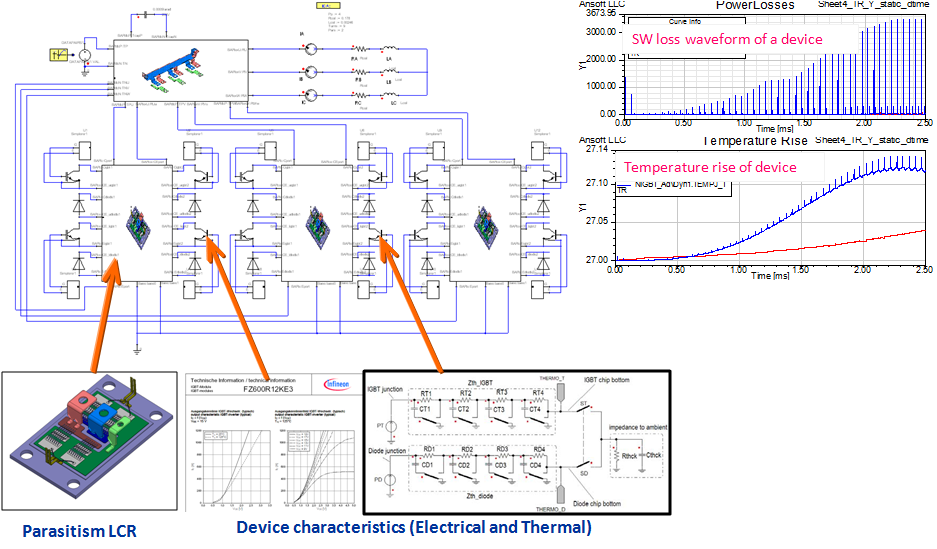
# 摘要
本文介绍了Simplorer软件在IGBT仿真应用中的重要性及其在电力电子领域中的应用。首先,文章概括了IGBT的基本理论和工作原理,涵盖其定义、组成、工作模式以及在电力电子设备中的作用。然后,详细探讨了Simplorer软件中IGBT模型的特点和功能,并通过仿真案例分析了IGBT的驱动电路和热特性。文章接着通过实际应用实例,如太阳能逆变器、电动汽车充放电系统和工业变频器,来
KUKA机器人的PROFINET集成:从新手到专家的配置秘籍
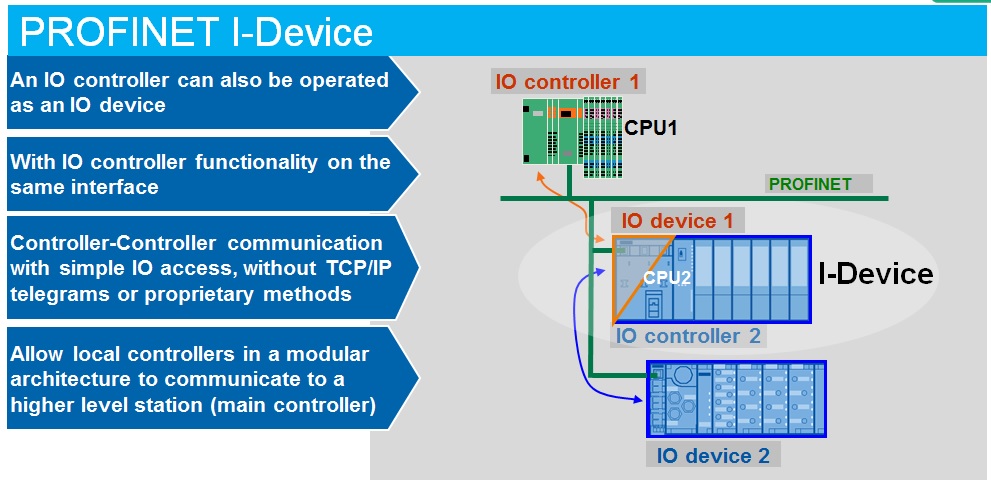
# 摘要
随着工业自动化技术的发展,KUKA机器人与PROFINET技术的集成已成为提高生产效率和自动化水平的关键。本文首先介绍KUKA机器人与PROFINET集成的基础知识,然后深入探讨PROFINET技术标准,包括通信协议、架构和安全性分析。在此基础上,文章详细描述了KUKA机器人的PROFINET配置方法,涵盖硬件准备、软件配置及故障诊断。进一步地,文章探讨了
STM32F030C8T6时钟系统设计:时序精确配置与性能调优
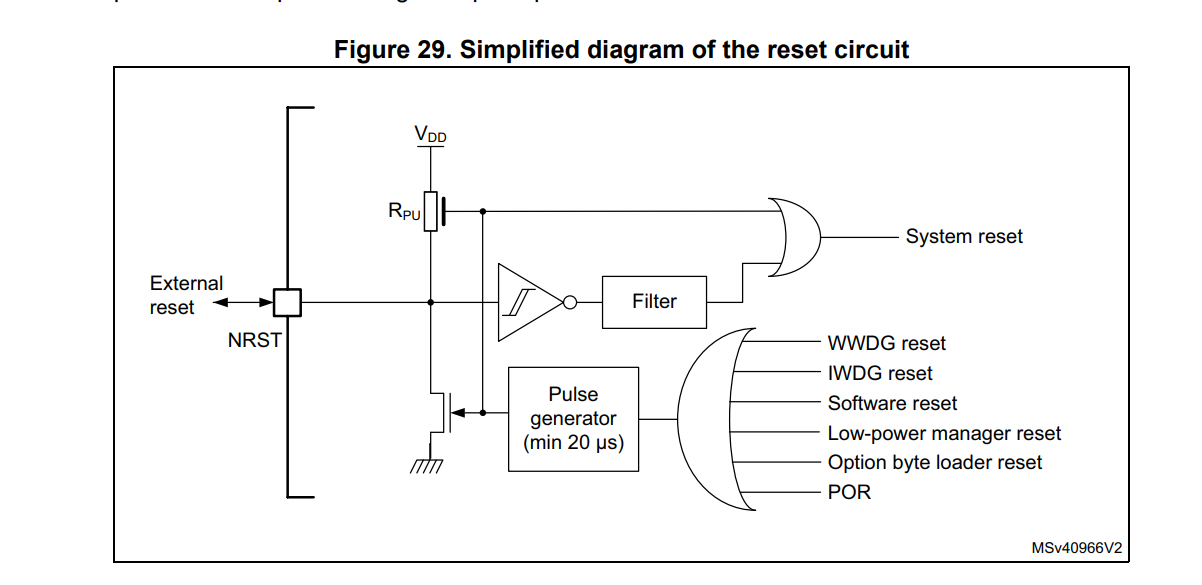
# 摘要
本文全面介绍了STM32F030C8T6微控制器的时钟系统,从基础配置到精确调优和故障诊断,详细阐述了时钟源选择、分频器、PLL生成器、时钟同步、动态时钟管理以及电源管理等关键组件的配置与应用。通过分析时钟系统的理论基础和实践操作,探讨了系统时钟配置的最优策略,并结合案例研究,揭示了时钟系统在实际应用中性能调优的效果与经验教训。此外,本文还探讨了提升系统稳定性的技术与策略
数字逻辑知识体系构建:第五版关键练习题精讲
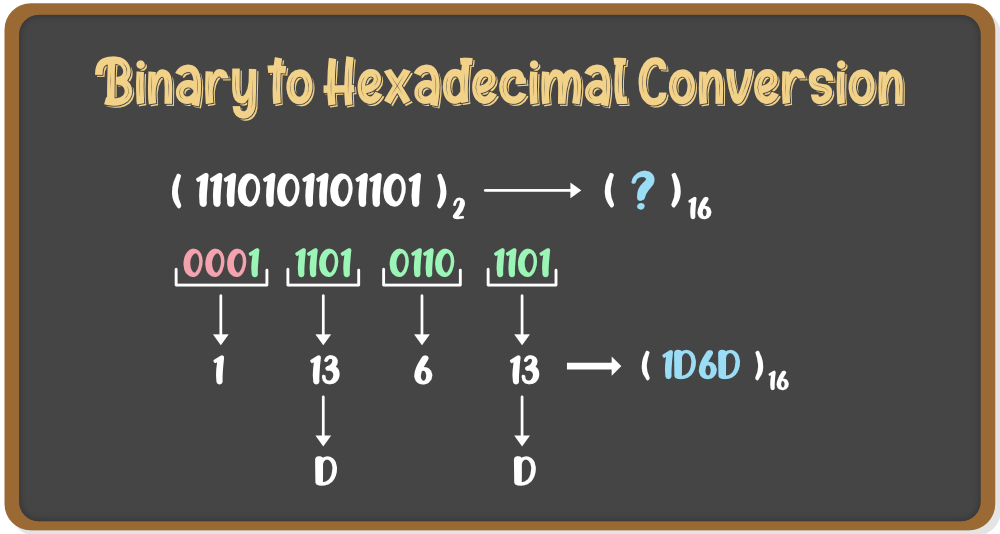
# 摘要
本文对数字逻辑的基本概念、设计技巧以及系统测试与验证进行了全面的探讨。首先解析了数字逻辑的基础原理,包括数字信号、系统以及逻辑运算的基本概念。接着,分析了逻辑门电路的设计与技巧,阐述了组合逻辑与时序逻辑电路的分析方法。在实践应用方面,本文详细介绍了数字逻辑设计的步骤和方法,以及现代技术中的数字逻辑应用案例。最后,探讨了
Element Card 常见问题汇总:24小时内解决你的所有疑惑

# 摘要
Element Card作为一种流行的前端组件库,为开发者提供了一系列构建用户界面和交互功能的工具。本文旨在全面介绍Element Card的基本概念、安装配置、功能使用、前后端集成以及高级应用等多方面内容。文章首先从基础知识出发,详述了Element Card的安装过程和配置步骤,强调了解决安装配置问题的重要性。随后,
【PyCharm从入门到精通】:掌握Excel操纵的必备技巧
# 摘要
本文详细介绍了PyCharm集成开发环境的安装、配置以及与Python编程语言的紧密结合。文章涵盖从基础语法回顾到高级特性应用,包括控制流语句、函数、类、模块、异常处理和文件操作。同时,强调了PyCharm调试工具的使用技巧,以及如何操纵Excel进行数据分析、处理、自动化脚本编写和高级集成。为了提升性能,文章还提供了PyCharm性能优化和
【提升VMware性能】:虚拟机高级技巧全解析
# 摘要
随着虚拟化技术的广泛应用,VMware作为市场主流的虚拟化平台,其性能优化问题备受关注。本文综合探讨了VMware在虚拟硬件配置、网络性能、系统和应用层面以及高可用性和故障转移等方面的优化策略。通过分析CPU资源分配、内存管理、磁盘I/O调整、网络配置和操作系统调优等关键技术点,本文旨在提供一套全面的性能提升方案。此外,文章还介绍了性能监控和分析工具的运用,帮助用户及时发
性能优化杀手锏:提升移动应用响应速度的终极技巧

# 摘要
移动应用性能优化是确保用户良好体验的关键因素之一。本文概述了移动应用性能优化的重要性,并分别从前端和后端两个角度详述了优化技巧。前端优化技巧涉及用户界面渲染、资源加载、代码执行效率的提升,而后端优化策略包括数据库操作、服务器资源管理及API性能调优。此外,文章还探讨了移动应用架构的设计原则、网络优化与安全性、性能监控与反馈系统的重要性。最后,通过案例分析来总结当前优化实践,并展望未来优
【CEQW2数据分析艺术】:生成报告与深入挖掘数据洞察
# 摘要
本文全面探讨了数据分析的艺术和技术,从报告生成的基础知识到深入的数据挖掘方法,再到数据分析工具的实际应用和未来趋势。第一章概述了数据分析的重要性,第二章详细介绍了数据报告的设计和高级技术,包括报告类型选择、数据可视化和自动化报告生成。第三章深入探讨了数据分析的方法论,涵盖数据清洗、统计分析和数据挖掘技术。第四章探讨了关联规则、聚类分析和时间序列分析等更高级的数据洞察技术。第五章将
ARM处理器安全模式解析:探索与应用之道

# 摘要
本文对ARM处理器的安全模式进行了全面概述,从基础理论讲起,详细阐述了安全状态与非安全状态、安全扩展与TrustZone技术、内存管理、安全启动和引导过程等关键概念。接着,文章深入探讨了ARM安全模式的实战应用,包括安全存储、密钥管理、安全通信协议以及安全操作系统的部署与管理。在高级应用技巧章节,本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )