【计算机视觉初探】:专升本计算机视觉基础知识入门!
发布时间: 2024-12-15 13:35:07 阅读量: 2 订阅数: 3 

参考资源链接:[2021广东专插本计算机基础真题及答案解析](https://wenku.csdn.net/doc/3kcsk8vn06?spm=1055.2635.3001.10343)
# 1. 计算机视觉概述
在当今数字化时代,计算机视觉作为人工智能的一个重要分支,已经成为推动技术革新的关键力量。计算机视觉通过分析图像和视频数据,赋予计算机“看”的能力,以实现对场景和对象的识别、跟踪和理解。随着硬件性能的提升和算法的进步,计算机视觉的应用范围不断扩大,从最初的工业自动化扩展到了现在的自动驾驶、医疗影像分析、智能安防、增强现实等诸多领域。本章我们将揭开计算机视觉的神秘面纱,从基础原理出发,探讨其发展历程、核心技术和潜在的应用场景。
# 2. 图像处理基础
图像处理是计算机视觉的核心部分,它包括图像的采集、数字化处理、分析、识别等众多技术。我们将深入探讨图像处理的基础,包括图像的基本概念、常用图像处理技术以及如何从图像中提取特征。
### 2.1 图像的基本概念
图像处理的第一步是理解图像本身。数字图像由像素阵列构成,每个像素由数字值表示颜色和亮度等信息。在这一小节,我们首先了解图像的数字化表示方法,接着深入到颜色模型。
#### 2.1.1 图像的数字化表示
图像的数字化表示是将图像转换为计算机可以处理的数据格式。一个基本的灰度图像可以使用一个二维数组来表示,其中每个元素对应一个像素的亮度值,取值范围通常是0到255(8位深度)。彩色图像则更加复杂,通常使用RGB颜色模型来表示,即红色、绿色、蓝色三个颜色通道的组合。在RGB模型中,每个颜色通道也通常是一个0到255的数值。为了存储这些数据,计算机使用位图(Bitmap)格式,常见的有BMP、JPEG、PNG等。
```python
# 示例:在Python中使用Pillow库来读取和显示一个图像
from PIL import Image
# 打开一个图像文件
image = Image.open('example.jpg')
# 显示图像
image.show()
```
在上面的Python代码中,我们使用了Pillow库来加载和显示一个名为"example.jpg"的图像文件。这是图像处理中常见的第一步,即图像的读取。
#### 2.1.2 图像的颜色模型
颜色模型是用于描述颜色的方法或系统。除了RGB模型之外,还有其他几种常见的颜色模型,如HSV(色调、饱和度、值)模型,它更接近于人类视觉感知方式,因此在处理图像时更为直观。还有一种CMYK(青色、洋红色、黄色、黑色)模型,常用于印刷和出版领域。
```python
# 示例:使用Pillow将图像从RGB颜色空间转换到HSV空间
from PIL import Image
import numpy as np
# 打开图像并转换为numpy数组以便进行处理
image = np.array(Image.open('example.jpg'))
# 将RGB图像转换为HSV空间
image_hsv = cv2.cvtColor(image, cv2.COLOR_RGB2HSV)
# 将转换后的图像转换回RGB空间(通常在处理之后)
image_rgb = cv2.cvtColor(image_hsv, cv2.COLOR_HSV2RGB)
# 将numpy数组转换回Pillow图像对象以便显示
image = Image.fromarray(image_rgb)
# 显示图像
image.show()
```
在上述代码中,我们使用了OpenCV库(通过cv2模块)来在RGB和HSV颜色空间之间转换图像。由于OpenCV主要是用于处理图像和视频的库,因此在这里使用它来进行颜色空间转换。
### 2.2 图像处理技术
图像处理技术涵盖了多种方法和算法,用于改善、变换或分析图像数据。接下来,我们将详细讲解三种常见的图像处理技术:图像变换、图像滤波增强技术和图像分割边缘检测。
#### 2.2.1 常用的图像变换
图像变换是指将图像从一个域转换到另一个域的过程,常用的图像变换包括傅里叶变换、小波变换等。这些变换有助于分析图像的频率特性,并对图像进行压缩、滤波和其他形式的处理。
```python
# 示例:使用Python和NumPy库来实现傅里叶变换
import numpy as np
import matplotlib.pyplot as plt
from scipy.fft import fft2, fftshift
# 创建一个简单的二维图像数据(128x128像素)
image = np.zeros((128, 128))
image[64, 64] = 1
# 执行二维傅里叶变换
f_transform = fft2(image)
# 为了可视化,将零频率分量移动到频谱中心
f_shift = fftshift(f_transform)
# 计算幅度谱(取对数以增强低幅度分量的可视化效果)
magnitude_spectrum = 20 * np.log(np.abs(f_shift))
# 显示结果
plt.imshow(magnitude_spectrum, cmap='gray')
plt.title('Magnitude Spectrum')
plt.show()
```
在上述代码中,我们创建了一个简单的二维图像,并对其执行了二维傅里叶变换。然后将零频率分量移到频谱中心,并显示了它的幅度谱。傅里叶变换是分析图像的重要工具,可以帮助我们理解图像的频率特性。
#### 2.2.2 图像滤波和增强技术
图像滤波是通过应用各种滤波器来改善图像质量的过程。滤波可以去除噪声、锐化或模糊图像。图像增强则是提高图像的视觉效果,使得图像中的某些特征更加突出。例如,直方图均衡化可以用来增强图像的对比度。
```python
# 示例:使用OpenCV进行直方图均衡化增强图像的对比度
import cv2
# 读取图像
image = cv2.imread('example.jpg', cv2.IMREAD_GRAYSCALE)
# 对图像应用直方图均衡化
equalized_image = cv2.equalizeHist(image)
# 显示原始图像和处理后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Equalized Image', equalized_image)
# 等待按键然后关闭所有窗口
cv2.waitKey(0)
cv2.destroyAllWindows()
```
上述代码使用OpenCV库来对灰度图像进行直方图均衡化处理,从而增强图像的对比度。直方图均衡化是图像处理中常用的技术,尤其适用于改善图像的全局对比度。
#### 2.2.3 图像分割和边缘检测
图像分割是将图像分割为多个部分或对象的过程。图像边缘检测是从图像中检测出边界的过程,这些边界通常对应于对象的轮廓。图像分割和边缘检测是计算机视觉中的重要技术,它们为理解图像内容提供了基础。
```python
# 示例:使用Canny算法进行边缘检测
import cv2
import matplotlib.pyplot as plt
# 读取图像
image = cv2.imread('example.jpg', cv2.IMREAD_GRAYSCALE)
# 使用Canny算法进行边缘检测
edges = cv2.Canny(image, threshold1=100, threshold2=200)
# 显示原始图像和边缘检测结果
plt.subplot(1, 2, 1)
plt.imshow(image, cmap='gray')
plt.title('Original Image')
plt.subplot(1, 2, 2)
plt.imshow(edges, cmap='gray')
plt.title('Edge Detection')
plt.show()
```
在这段代码中,我们使用了OpenCV库中的Canny边缘检测算法来处理灰度图像,并使用matplotlib显示了结果。Canny算法是一种非常流行的边缘检测方法,它首先使用高斯滤波去除噪声,然后计算图像梯度的强度和方向,并应用非极大值抑制和双阈值方法来确定边缘。
### 2.3 图像的特征提取
图像特征是图像中对人或机器有意义的区域或形状。特征提取涉及识别、选择和提取对任务有价值的特征。在本小节中,我们将讨论点、线、面特征以及特征描述符的计算方法。
#### 2.3.1 点、线、面特征
点特征通常对应图像中的特定点,比如角点或关键点。线特征和面特征通常表示图像中的直线和区域。这些特征对于图像理解和识别是至关重要的。
```python
# 示例:使用Harris角点检测法来识别图像中的关键点
import cv2
import matplotlib.pyplot as plt
# 读取图像
image = cv2.imread('example.jpg')
# 转换为灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用Harris角点检测
gray = np.float32(gray)
dst = cv2.cornerHarris(gray, blockSize=2, ksize=3, k=0.04)
# 对于结果进行膨胀以便更加容易看到角点
dst = cv2.dilate(dst, None)
# 阈值化,以便得到二值图像
image[dst > 0.01 * dst.max()] = [0, 0, 255]
# 显示图像
plt.imshow(image)
plt.title('Harris Corner Detection')
plt.show()
```
在上述代码中,我们使用了OpenCV库中的Harris角点检测算法来寻找图像中的角点,并通过膨胀和阈值化将其突出显示。角点是图像中的显著特征点,可用于跟踪和识别图像中的对象。
#### 2.3.2 特征描述符的计算方法
特征描述符是一组数值,描述了图像特征的独特属性,它们用于比较和识别图像中的对象。特征描述符的例子包括SIFT(尺度不变特征变换)和SURF(加速鲁棒特征)等。
```python
# 示例:使用ORB算法来计算特征描述符
import cv2
import numpy as np
# 读取图像
image = cv2.imread('example.jpg')
# 转换为灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 初始化ORB检测器
orb = cv2.ORB_create()
# 检测关键点并计算描述符
keypoints, descriptors = orb.detectAndCompute(gray, None)
# 打印关键点和描述符数量
print("Number of keypoints detected:", len(keypoints))
print("Descriptor size:", descriptors.shape)
# 显示图像中的关键点
cv2.drawKeypoints(image, keypoints, image)
cv2.imshow('ORF Keypoints', image)
cv2.waitKey(0)
cv2
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
PowerBuilder数据窗口高级技巧:揭秘如何提升数据处理效率
参考资源链接:[PowerBuilder6.0/6.5基础教程:入门到精通](https://wenku.csdn.net/doc/6401abbfcce7214c316e959e?spm=1055.2635.3001.10343)
# 1. 数据窗口的基本概念和功能
数据
ANSYS Fluent UDF 优化秘籍:提升模拟效率的终极指南

参考资源链接:[2020 ANSYS Fluent UDF定制手册(R2版)](https://wenku.csdn.net/doc/50fpnuzvks?spm=1055.2635.3001.10343)
# 1. ANSYS Fluent UDF简介
ANSYS
Tasking编译器最佳实践:嵌入式系统开发的秘籍曝光
参考资源链接:[Tasking TriCore编译器用户指南:VX-toolset使用与扩展指令详解](https://wenku.csdn.net/doc/4ft7k5gwmd?spm=1055.2635.3001.10343)
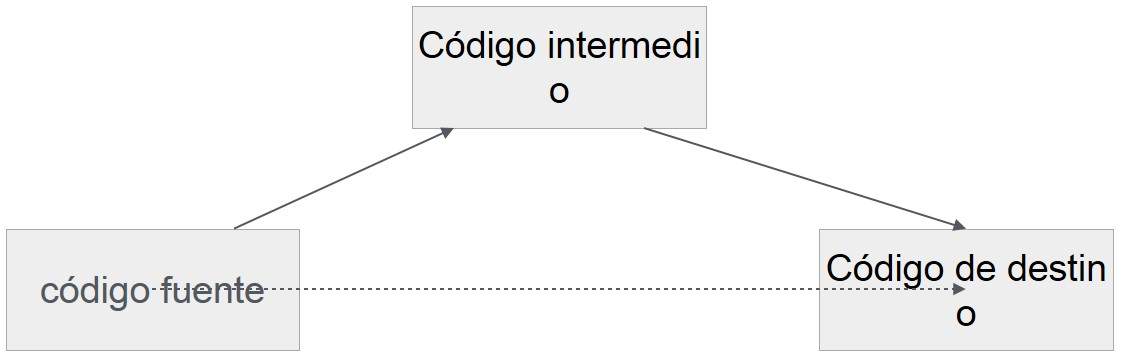
# 1. Tasking编译器概述及其在嵌入式系统中的作用
在现代嵌入式系统开发中,Tasking编译器扮演着至关重要的角色。Tasking编译器是一类针对特定编程语
【深度剖析FatFS】:构建高效嵌入式文件系统的关键步骤
参考资源链接:[FatFS文件系统模块详解及函数用法](https://wenku.csdn.net/doc/79f2wogvkj?spm=1055.2635.3001.10343)
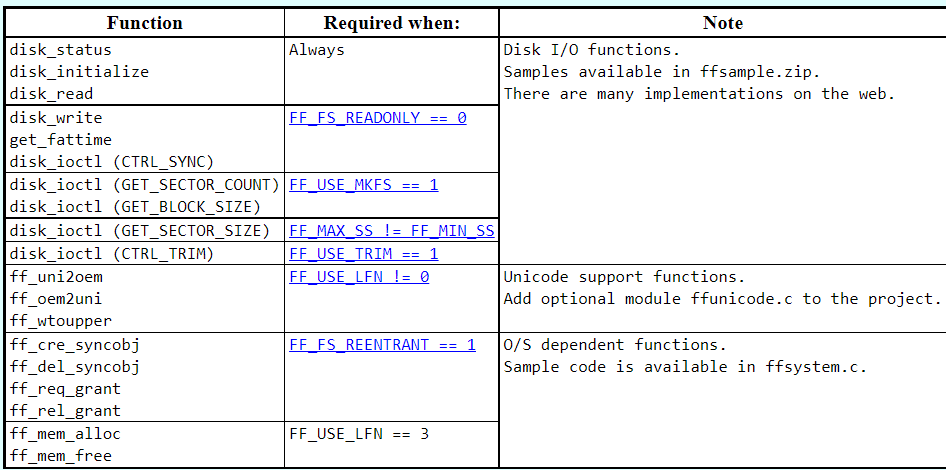
# 1. FatFS概述与基础架构
FatFS是一个完全用ANSI C编写的通用的 FAT 文件系统模块。它设计用于小型嵌入式系统,例如微控制器,拥有灵活的可配置选项和良好的移植性。本章节将介绍Fat
【处理器设计核心】:掌握计算机体系结构量化分析第六版精髓
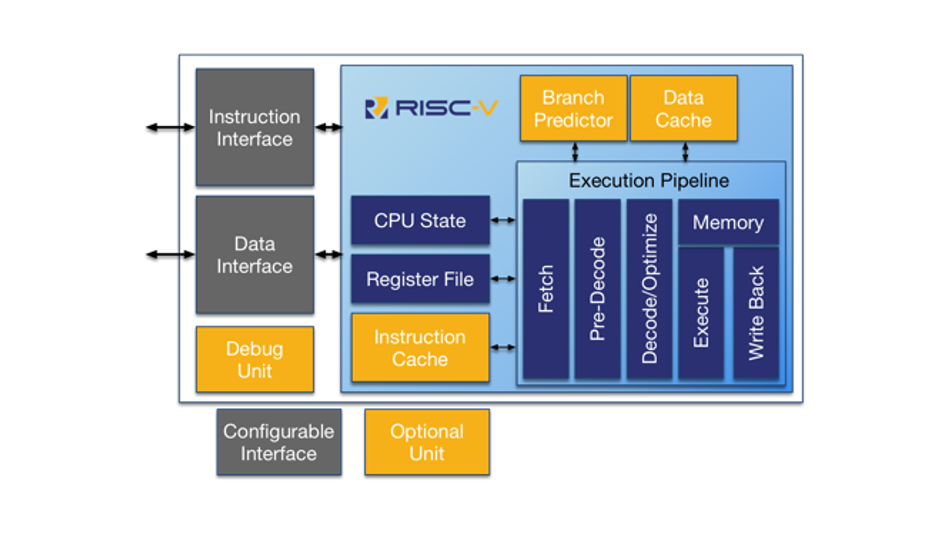
参考资源链接:[量化分析:计算机体系结构第六版课后习题解答](https://wenku.csdn.net/doc
【iOS音效提取与游戏开发影响案例研究】:提升游戏体验的音效秘诀

参考资源链接:[iPhone原生提示音提取:全面分享下载指南](https://wenku.csdn.net/doc/2dpcybiuco?spm=1055.2635.3001.10343)
# 1
DisplayPort 1.4 vs HDMI 2.1:技术规格大比拼,专家深入剖析
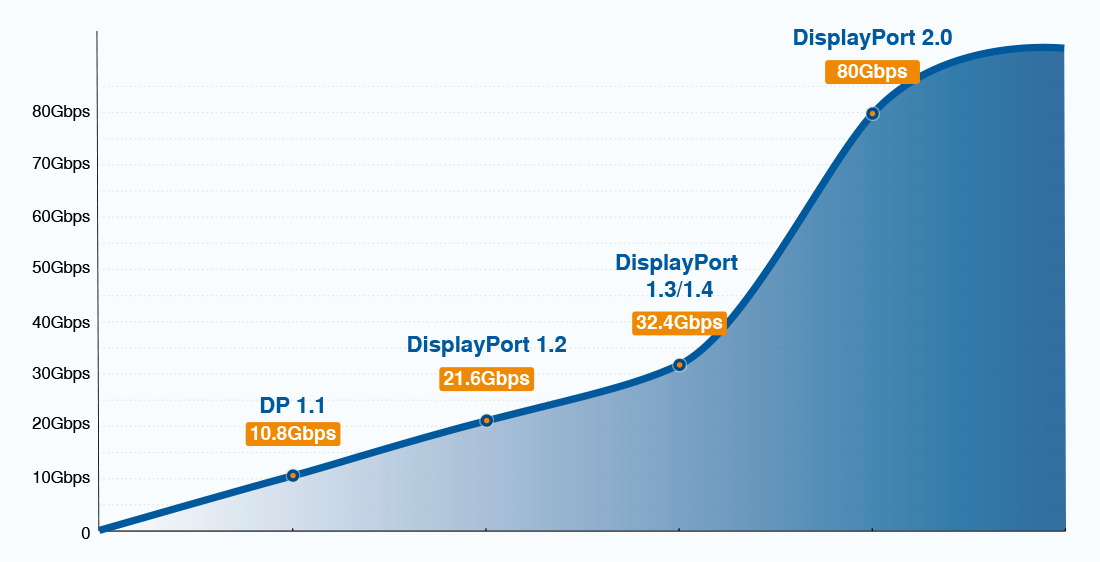
参考资源链接:[display_port_1.4_spec.pdf](https://wenku.csdn.net/doc/6412b76bbe7fbd1778d4a3a1?spm=1055.2635.3001.10343)
# 1. DisplayPort 1.4与HDMI 2.1简介
在数字显示技术的快速演进中,Display
【C语言编程精进】:手把手教你打造高效、易用的计算器
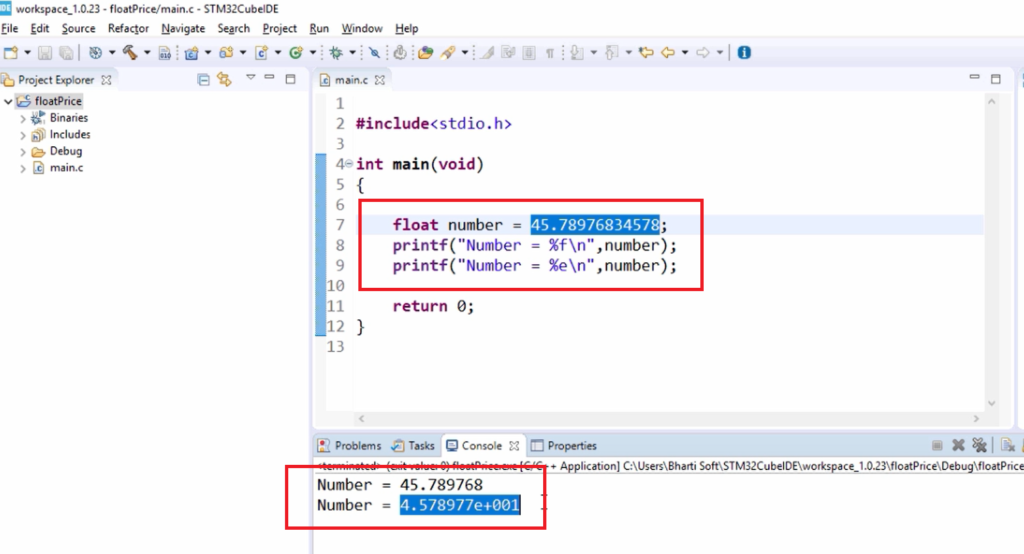
参考资源链接:[编写一个支持基本运算的简单计算器C程序](https://wenku.csdn.net/doc/4d7dvec7kx?spm=1055.2635.3001.10343)
# 1. C语言基础与计算器概念
## 1.1 C语言编程简介
C语言,一种广泛使用的计算机编程语言,具有强大的功能、简洁的语法和高效的执行能力。它诞生于1972年,由Dennis Ritchie开
Ubuntu显卡驱动管理:【手把手教学】关键步骤与高级技巧
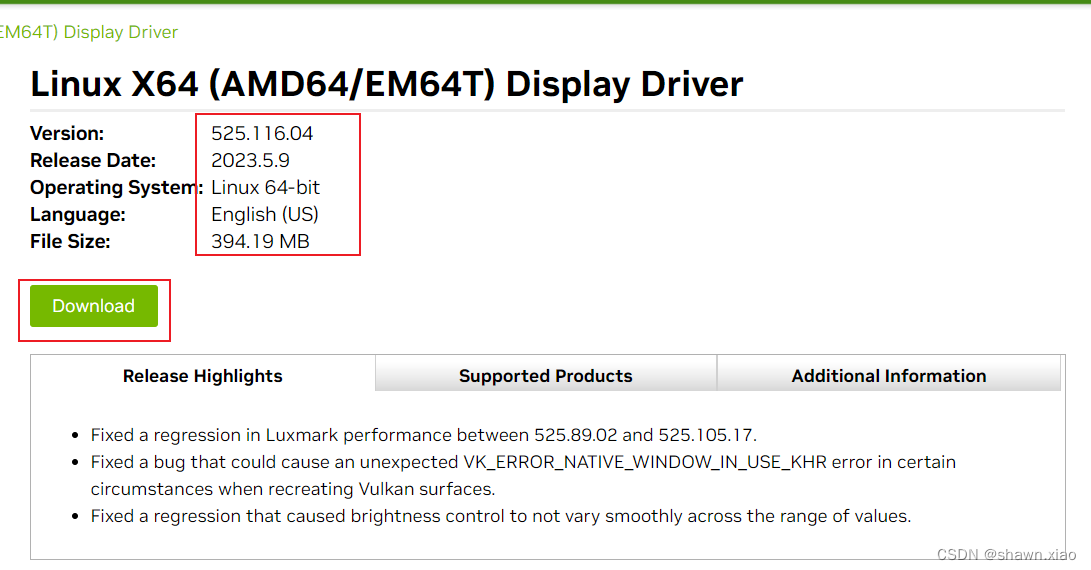
参考资源链接:[Ubuntu vs Debian:AMD显卡驱动在Debian中的安装教程](https://wenku.csdn.net/doc/frnaypmyjc?spm=1055.2635.3001.10343)
# 1. Ubuntu显卡驱动概述
在当今高速发展的信息技术领域中,显卡驱动扮演着不可或缺的角色,尤其在Linux操作系统,如Ubuntu中,驱动的选择和安装对系统性能和稳定性有着直接影响。Ubun
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )