相位锁定环(PLL)的实战指南:理论与实现细节全揭露
发布时间: 2024-12-14 02:14:01 阅读量: 11 订阅数: 13 

PLL dq 理论:pll 是使用 dq 参考理论实现的-matlab开发

参考资源链接:[胡广书《数字信号处理》第三版课后习题解答](https://wenku.csdn.net/doc/764xq846rz?spm=1055.2635.3001.10343)
# 1. 相位锁定环(PLL)基础介绍
在电子工程的领域中,相位锁定环(Phase-Locked Loop,简称PLL)是一种广泛应用于频率合成、信号恢复、时钟生成与同步等场景的重要技术。PLL利用反馈机制实现对输入信号频率和相位的跟踪,以达到锁定状态。为了更好地理解PLL,本章节将介绍其基本概念、组成和工作原理,为深入探讨PLL的高级应用和设计优化打下基础。
## 1.1 PLL的定义和关键术语
PLL是一个闭环控制系统,它由三个主要部分组成:相位检测器、环路滤波器和压控振荡器(VCO)。相位检测器用来比较输入信号和VCO的输出信号,生成一个误差信号。这个误差信号经过环路滤波器处理后,用于调整VCO的输出频率,直到VCO输出与输入信号同步,达到锁定状态。
## 1.2 PLL的主要组成部分解析
相位检测器是PLL的心脏部分,其作用是生成误差信号,对输入信号和VCO输出信号的相位差进行检测。环路滤波器在误差信号中去除高频噪声,并平滑误差信号以提供稳定的控制电压给VCO。VCO根据控制电压调整输出频率,是完成频率和相位调整的关键部件。
接下来的章节将详细介绍PLL的核心理论与工作原理,深入探讨其数学模型和性能指标。
# 2. ```
# 第二章:PLL核心理论与工作原理
## 2.1 PLL的基本概念和组成
### 2.1.1 PLL的定义和关键术语
相位锁定环(PLL)是一种反馈控制系统,它能够使一个本地振荡器(Local Oscillator, LO)的输出频率和相位与一个参考频率信号同步。PLL广泛应用于无线通信、频率合成、时钟恢复等领域。PLL的核心是相位比较器(Phase Detector),它对输入信号和振荡器的输出信号进行比较,并输出两者之间的相位差。环路滤波器(Loop Filter)处理相位比较器的输出,控制压控振荡器(Voltage-Controlled Oscillator, VCO)的频率,直到输出信号与输入信号同步。
关键术语包括:
- **参考频率(Reference Frequency)**:输入的信号频率,PLL将尝试与这个频率同步。
- **反馈频率(Feedback Frequency)**:VCO产生的输出频率,经过分频器(如果有的话)后被送回相位比较器。
- **相位差(Phase Difference)**:参考频率和反馈频率之间的相位差。
- **控制电压(Control Voltage)**:环路滤波器输出的电压,用来控制VCO的频率。
- **锁定状态(Locked State)**:PLL达到稳定状态,输入和输出频率、相位一致。
### 2.1.2 PLL的主要组成部分解析
PLL的主要组成部分包括相位比较器、环路滤波器、压控振荡器(VCO)以及可选的分频器。各个组件的详细作用如下:
- **相位比较器**:通过比较输入参考信号和VCO输出信号的相位,产生一个与相位差成比例的误差电压或误差电流。
- **环路滤波器**:通常是一个低通滤波器,用于滤除相位比较器输出中的高频噪声,保持控制电压的平滑性。
- **压控振荡器(VCO)**:根据控制电压的大小改变其输出频率,如果控制电压上升,VCO输出频率也上升,反之亦然。
- **分频器**:用于降低VCO输出频率,以便与输入参考频率进行比较,特别是在输出频率远高于输入频率的场合。
## 2.2 PLL的工作原理和数学模型
### 2.2.1 PLL的相位检测机制
相位检测机制是PLL能够实现相位同步的关键。相位比较器是相位检测机制的核心部件,它的功能可以类比为一个误差生成器。当VCO的输出频率和相位与输入参考信号不匹配时,相位比较器会输出一个误差信号。这个误差信号经过环路滤波器滤波后,用来调整VCO的频率,直到两个信号的相位对齐。在理想情况下,相位锁定后,VCO输出频率是输入频率的整数倍。
### 2.2.2 环路滤波器的功能和设计
环路滤波器设计的关键在于其传递函数的选择,它决定了PLL系统的动态响应和噪声滤除特性。一个理想的环路滤波器需要平衡好跟踪速度、噪声滤除效果以及相位裕度。常见的环路滤波器有无源比例积分滤波器(PI滤波器)和有源比例积分微分滤波器(PID滤波器)。
传递函数可以表示为:
\[ H(s) = \frac{K_f (1+sT_1)}{sT_2} \]
其中,\(K_f\)是滤波器增益,\(T_1\)和\(T_2\)分别是积分和微分时间常数。在设计环路滤波器时,需要仔细选择这些参数来确保系统性能。
### 2.2.3 压控振荡器(VCO)的特性
VCO是PLL中调整输出频率的部件,它的性能直接影响PLL的相位噪声和频率稳定度。VCO的特性包括其调频灵敏度(\(K_v\)),表示为频率变化与控制电压变化的比率,以及其频率范围。
VCO可以有不同的实现方式,常见的有LC振荡器和环形振荡器等。LC振荡器在高频应用中更加稳定,但需要较大的芯片面积;环形振荡器则占用更少的面积,但可能具有较高的相位噪声。
## 2.3 PLL的性能指标与分析
### 2.3.1 相位噪声与抖动
相位噪声指的是VCO输出频率在理想频率周围的随机波动。高相位噪声可能会导致接收信号解调困难,特别是在无线通信系统中。抖动可以看作是相位噪声在时域上的表现,过大的抖动会影响数字信号的同步和数据的完整性。
减小相
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《数字信号处理习题》专栏是一本全面的指南,涵盖了数字信号处理的各个方面。它提供了 20 个实用技巧,帮助构建精通信号处理系统;详细介绍了数字滤波器设计的秘诀;揭示了窗函数优化的奥秘;提供了多速率信号处理技术的必备知识;分享了信号编码压缩的 10 个关键技巧;深入剖析了生物医学信号处理;对比了 MATLAB 和 Python 的最佳实践;展示了数字信号处理案例的完整解析;讲解了频谱分析方法;指导量化误差最小化;介绍了数字信号处理中的非线性技术;详解了自适应滤波器的原理和应用;揭示了相位锁定环的实战细节;阐述了信号检测与估计理论;揭秘了波形生成与调制技术;以及探讨了现代谱估计技术。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
STM32G431开发板初体验:新手必看的10个实用入门技巧
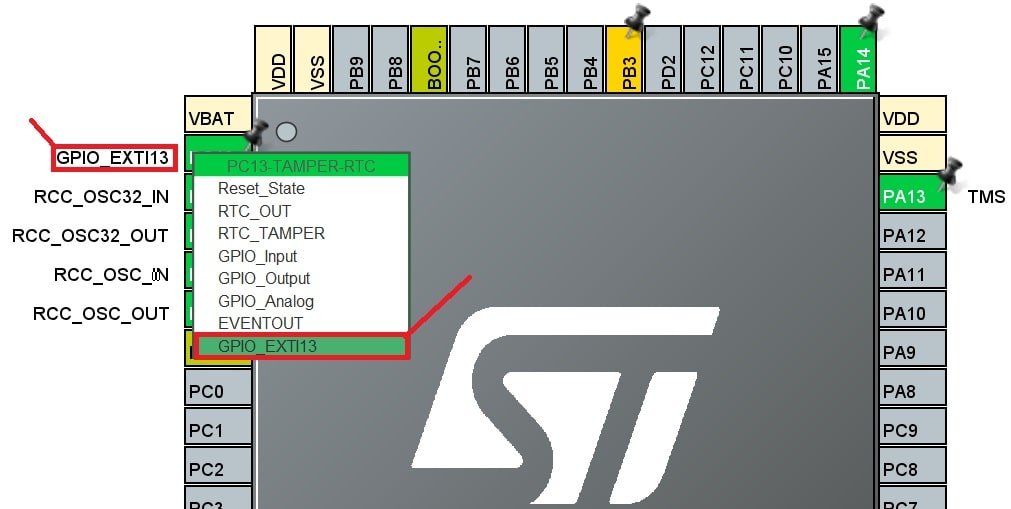
参考资源链接:[STM32G431开发板详解:接口与芯片原理图指南](https://wenku.csdn.net/doc/6462d47e543f844488995d9c?spm=1055.2635.3001.10343)
# 1. STM32G431开发板概述
## 1.1 STM32G431开发板简介
STM
【HC6800-MS内存管理】:原理图解读与内存优化实践

参考资源链接:[HC6800-MS开发板详细电路图与组件解析](https://wenku.csdn.net/doc/6461c98e543f84448895221c?spm=1055.2635.3001.10343)
# 1. HC6800-MS内存管理基础
## 1.1 内存管理的重要性
内存作为计算机系统中最基本的资源之一,其有效管理直
【立即行动】西门子PLC程序块加解锁:安全加锁的紧急措施
参考资源链接:[西门子PLC S7-300/400程序块加锁解锁方法](https://wenku.csdn.net/doc/6412b56bbe7fbd1778d43144?spm=1055.2635.3001.10343)
# 1. 西门子PLC程序块加解锁概述
在自动化控制系统领域,西门子PLC(可编程逻辑控制器)是一个重要的组成
.NET Framework 3.5 SP1问题全解析:专家教你如何一网打尽安装难题
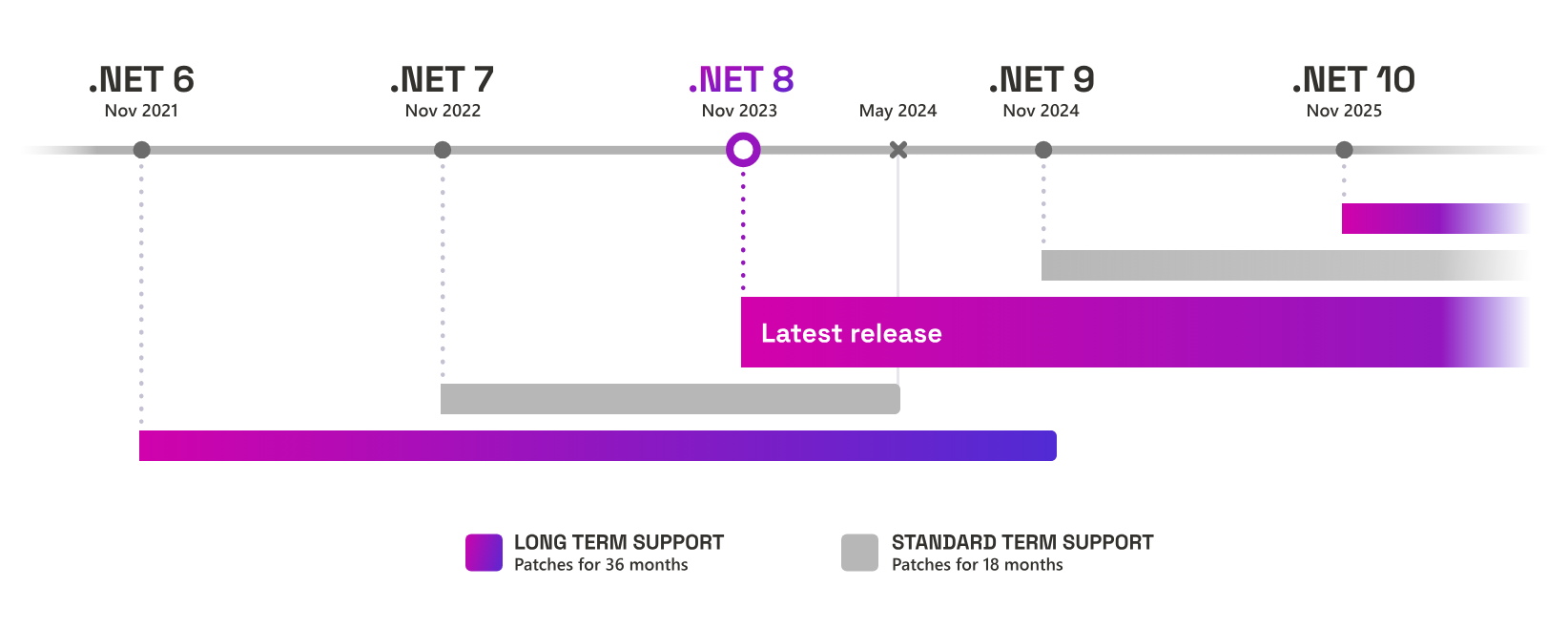
参考资源链接:[离线安装 .NET Framework 3.5 SP1 完整包及语言包教程](https://wenku.csdn.net/doc/4z3yuygoyi?spm=1055.2635.3001.10343)
# 1. .NET Framework 3.5 SP1概述
## .NET Framework 3.5 SP1简介
.NET Framework 3.5 SP1
ARINC664 Part 7实践秘籍:理论到实施的无缝转换(操作手册)
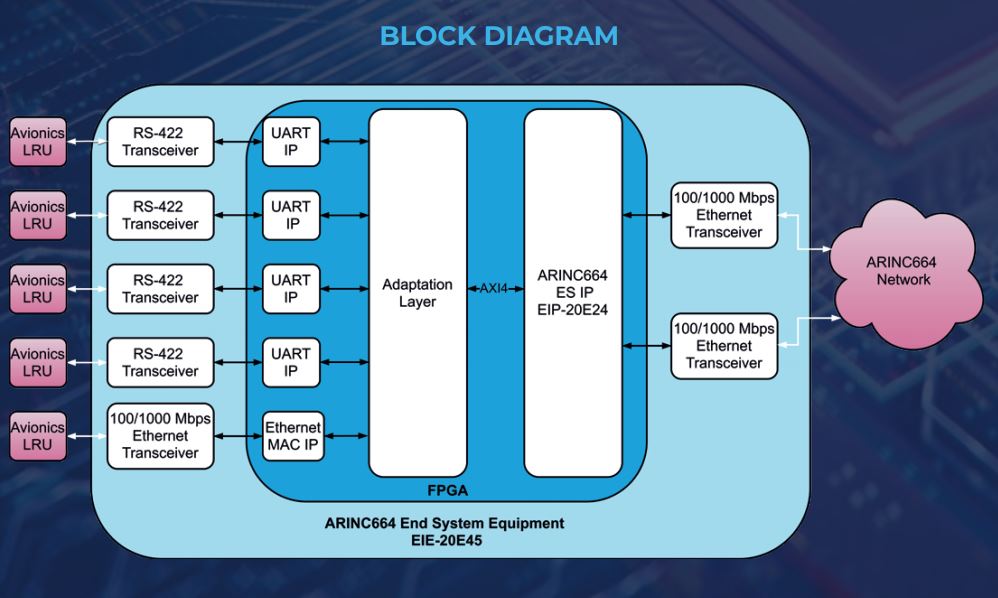
参考资源链接:[ARINC664第7部分:中文版航空电子全双工交换式以太网规范](https://wenku.csdn.net/doc/6412b79ebe7fbd1778d4af0c?spm=1055.2635.3001.10343)
# 1. ARINC664 Part 7标准概述
## 1.1 标准的起源和应用背景
ARINC664 Part 7是一种航空电子数据网络通信标准
Cadence Allegro高级优化:板边Outline设计的8个高级技巧
参考资源链接:[cadence allegro里如何绘制板边outline](https://wenku.csdn.net/doc/6412b621be7fbd1778d459e4?spm=1055.2635.3001.10343)
# 1. Cadence Allegro概述与板边设计基础
## 简介
Cadence Allegro是电子设计自动化(EDA)领域内广受欢迎的PCB设计工具
【Honeywell OH4502二次开发全能教程】:接口编程与应用拓展

参考资源链接:[honeywell OH4502二维2.4G说明书(最终版)中文.pdf](https://wenku.csdn.net/doc/6412b45fbe7fbd1778d3f60e?spm=1055.2635.3001.10343)
# 1. Honeywell OH4502设备概述
## 设备简介
Honeywell OH4
提高数据传输可靠性:海明码的扩展与优化策略

参考资源链接:[海明码与码距:概念、例子及纠错能力分析](https://wenku.csdn.net/doc/5qhk39kpxi?spm=1055.26
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )