单片机温度控制系统PID参数整定:理论与实践
发布时间: 2024-07-15 05:07:45 阅读量: 55 订阅数: 29 

单片机温度控制.zip_PID 温度_PID单片机_PID温度_PID温度控制_温度PID

# 1. 单片机温度控制系统简介
单片机温度控制系统是一种利用单片机对温度进行控制的系统。它主要由传感器、单片机、执行器和显示器组成。传感器负责检测温度,并将温度信号转换为电信号;单片机负责对温度信号进行处理,并输出控制信号;执行器根据控制信号对温度进行调节;显示器负责显示温度值。
单片机温度控制系统具有体积小、成本低、可靠性高、易于实现等优点,广泛应用于工业、农业、医疗等领域。例如,在工业生产中,单片机温度控制系统可以用于控制炉窑、烘箱等设备的温度;在农业生产中,单片机温度控制系统可以用于控制温室、畜舍等环境的温度;在医疗领域,单片机温度控制系统可以用于控制手术室、病房等环境的温度。
# 2. PID控制理论
### 2.1 PID控制原理
**比例-积分-微分(PID)控制**是一种反馈控制机制,广泛用于工业自动化和过程控制中。PID控制器通过测量被控变量(PV)与设定值(SP)之间的误差(e),并根据误差的比例、积分和微分值来调整控制输出(u),以实现对被控变量的精准控制。
**PID控制原理**
* **比例(P)控制:**根据误差的当前值调整控制输出。P控制具有快速响应误差变化的优点,但容易产生稳态误差。
* **积分(I)控制:**根据误差的累积值调整控制输出。I控制可以消除稳态误差,但响应速度较慢。
* **微分(D)控制:**根据误差变化率调整控制输出。D控制可以提高系统的稳定性,但容易受到噪声的影响。
### 2.2 PID控制器的设计与实现
**PID控制器的设计**
PID控制器的设计涉及到三个关键参数的确定:比例增益(Kp)、积分时间(Ti)和微分时间(Td)。这些参数的设置会影响控制系统的性能,包括响应速度、稳定性和精度。
**PID控制器的实现**
PID控制器可以通过模拟电路或数字算法实现。模拟PID控制器使用运算放大器和电容电阻网络来计算控制输出。数字PID控制器使用微处理器或FPGA来实现控制算法,具有更高的精度和灵活性。
**代码块 1:数字PID控制器实现**
```python
def pid_control(error, Kp, Ti, Td):
"""
PID控制算法实现
参数:
error: 误差值
Kp: 比例增益
Ti: 积分时间
Td: 微分时间
返回:
控制输出
"""
integral = 0
derivative = 0
output = Kp * error + integral + Td * derivative
integral += error * Ti
derivative = (error - previous_error) / Td
previous_error = error
return output
```
**逻辑分析:**
该代码实现了数字PID控制算法。它首先计算误差值,然后根据比例增益、积分时间和微分时间计算控制输出。积分项和微分项分别用于消除稳态误差和提高系统稳定性。
# 3. PID参数整定方法
### 3.1 Ziegler-Nichols方法
Ziegler-Nichols方法是一种经典的PID参数整定方法,其原理是通过阶跃响应曲线来确定PID控制器的参数。该方法分为以下几个步骤:
1. **打开环路,施加阶跃输入**

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏全面探讨了单片机在温度控制领域的应用。从原理到应用,专家们深入剖析了单片机温度控制系统的各个方面。从算法优化到故障排查,从抗干扰设计到人机交互界面,再到无线通信和云端连接,本专栏提供了全面的指导。此外,还涵盖了能耗优化、可靠性评估、测试验证、成本优化等重要主题。通过深入的分析和丰富的案例,本专栏旨在帮助工程师和开发人员设计和构建高效、可靠且经济的单片机温度控制系统。无论是在工业自动化、医疗保健、智能家居、农业、环境监测还是能源管理领域,本专栏都提供了宝贵的见解,帮助读者充分利用单片机在温度控制中的强大功能。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
93K缓存策略详解:内存管理与优化,提升性能的秘诀
# 摘要
93K缓存策略作为一种内存管理技术,对提升系统性能具有重要作用。本文首先介绍了93K缓存策略的基础知识和应用原理,阐述了缓存的作用、定义和内存层级结构。随后,文章聚焦于优化93K缓存策略以提升系统性能的实践,包括评估和监控93K缓存效果的工具和方法,以及不同环境下93K缓存的应用案例。最后,本文展望了93K缓存
Masm32与Windows API交互实战:打造个性化的图形界面
# 摘要
本文旨在介绍基于Masm32和Windows API的程序开发,从基础概念到环境搭建,再到程序设计与用户界面定制,最后通过综合案例分析展示了从理论到实践的完整开发过程。文章首先对Masm32环境进行安装和配置,并详细解释了Masm编译器及其他开发工具的使用方法。接着,介绍了Windows API的基础知识,包括API的分类、作用以及调用机制,并对关键的API函数进行了基础讲解。在图形用户界面(GUI)的实现章节中,本文深入
数学模型大揭秘:探索作物种植结构优化的深层原理
# 摘要
本文系统地探讨了作物种植结构优化的概念、理论基础以及优化算法的应用。首先,概述了作物种植结构优化的重要性及其数学模型的分类。接着,详细分析了作物生长模型的数学描述,包括生长速率与环境因素的关系,以及光合作用与生物量积累模型。本文还介绍了优化算法,包括传统算法和智能优化算法,以及它们在作物种植结构优化中的比较与选择。实践案例分析部分通过具体案例展示了如何建立优化模型,求解并分析结果。
S7-1200 1500 SCL指令性能优化:提升程序效率的5大策略

# 摘要
本论文深入探讨了S7-1200/1500系列PLC的SCL编程语言在性能优化方面的应用。首先概述了SCL指令性能优化的重要性,随后分析了影响SCL编程性能的基础因素,包括编程习惯、数据结构选择以及硬件配置的作用。接着,文章详细介绍了针对SCL代码的优化策略,如代码重构、内存管理和访问优化,以及数据结构和并行处理的结构优化。
泛微E9流程自定义功能扩展:满足企业特定需求

# 摘要
本文深入探讨了泛微E9平台的流程自定义功能及其重要性,重点阐述了流程自定义的理论基础、实践操作、功能扩展案例以及未来的发展展望。通过对流程自定义的概念、组件、设计与建模、配置与优化等方面的分析,本文揭示了流程自定义在提高企业工作效率、满足特定行业需求和促进流程自动化方面的重要作用。同时,本文提供了丰富的实践案例,演示了如何在泛微E9平台上配置流程、开发自定义节点、集成外部系统,
KST Ethernet KRL 22中文版:硬件安装全攻略,避免这些常见陷阱

# 摘要
本文详细介绍了KST Ethernet KRL 22中文版硬件的安装和配置流程,涵盖了从硬件概述到系统验证的每一个步骤。文章首先提供了硬件的详细概述,接着深入探讨了安装前的准备工作,包括系统检查、必需工具和配件的准备,以及
约束理论与实践:转化理论知识为实际应用
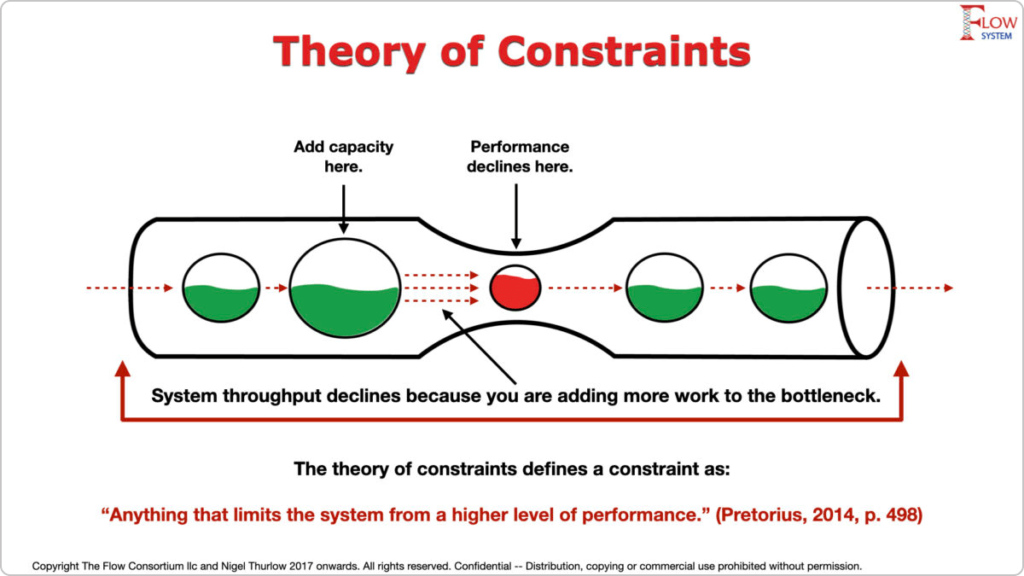
# 摘要
约束理论是一种系统性的管理原则,旨在通过识别和利用系统中的限制因素来提高生产效率和管理决策。本文全面概述了约束理论的基本概念、理论基础和模型构建方法。通过深入分析理论与实践的转化策略,探讨了约束理论在不同行业,如制造业和服务行业中应用的案例,揭示了其在实际操作中的有效性和潜在问题。最后,文章探讨了约束理论的优化与创新,以及其未来的发展趋势,旨在为理论研究和实际应用提供更广阔的
FANUC-0i-MC参数与伺服系统深度互动分析:实现最佳协同效果
# 摘要
本文深入探讨了FANUC 0i-MC数控系统的参数配置及其在伺服系统中的应用。首先介绍了FANUC 0i-MC参数的基本概念和理论基础,阐述了参数如何影响伺服控制和机床的整体性能。随后,文章详述了伺服系统的结构、功能及调试方法,包括参数设定和故障诊断。在第三章中,重点分析了如何通过参数优化提升伺服性能,并讨论了伺服系统与机械结构的匹配问题。最后,本文着重于故障预防和维护策略,提
ABAP流水号安全性分析:避免重复与欺诈的策略
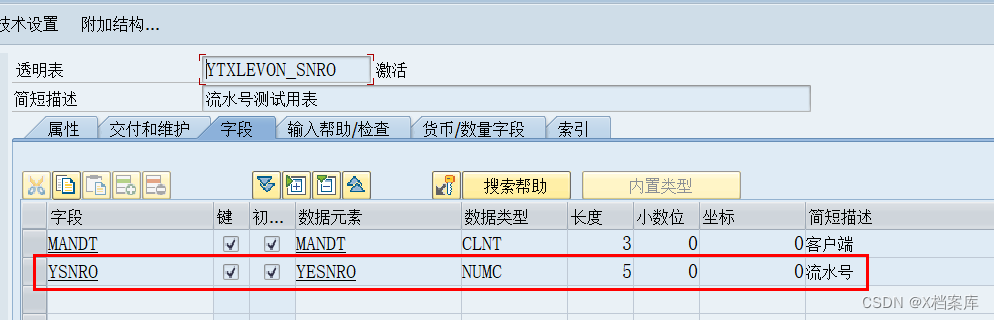
# 摘要
本文全面探讨了ABAP流水号的概述、生成机制、安全性实践技巧以及在ABAP环境下的安全性增强。通过分析流水号生成的基本原理与方法,本文强调了哈希与加密技术在保障流水号安全中的重要性,并详述了安全性考量因素及性能影响。同时,文中提供了避免重复流水号设计的策略、防范欺诈的流水号策略以及流水号安全的监控与分析方法。针对ABAP环境,本文论述了流水号生成的特殊性、集成安全机制的实现,以及安全问题的ABAP代
Windows服务器加密秘籍:避免陷阱,确保TLS 1.2的顺利部署
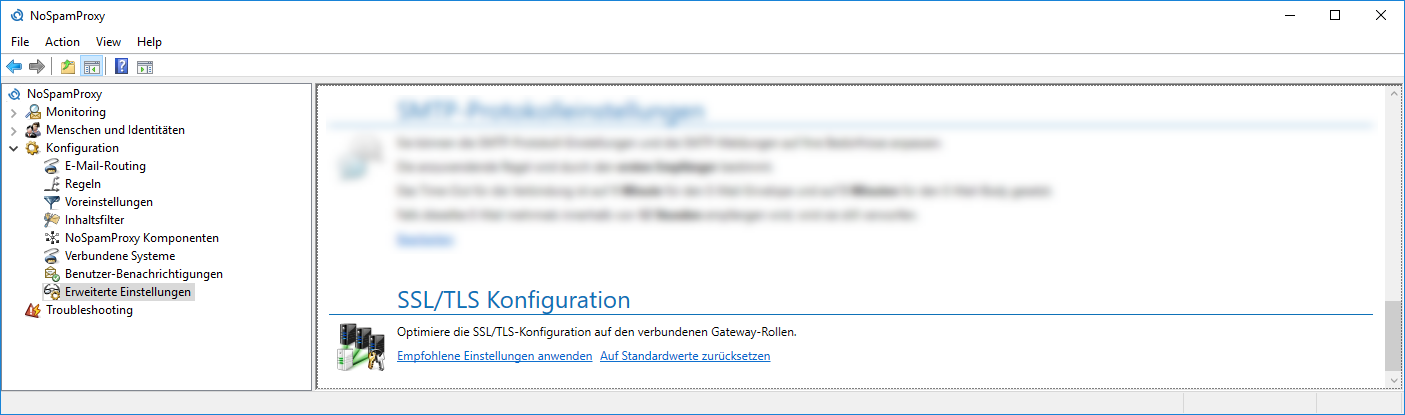
# 摘要
本文提供了在Windows服务器上配置TLS 1.2的全面指南,涵盖了从基本概念到实际部署和管理的各个方面。首先,文章介绍了TLS协议的基础知识和其在加密通信中的作用。其次,详细阐述了TLS版本的演进、加密过程以及重要的安全实践,这
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )