评估OpenCV双目相机标定结果:如何判断标定质量,确保可靠性
发布时间: 2024-08-13 01:08:34 阅读量: 83 订阅数: 33 
# 1. OpenCV双目相机标定概述
OpenCV双目相机标定是一种计算机视觉技术,用于确定双目相机系统的几何参数,包括相机内参和外参。这些参数对于准确的三维重建和测量至关重要。
双目相机标定过程涉及使用一组已知的三维点,从不同的相机视图中获取图像。然后,使用这些图像来估计相机的位置、方向和焦距等参数。标定结果可以提高双目相机系统的精度和可靠性,使其适用于各种计算机视觉应用。
# 2. 双目相机标定理论基础
### 2.1 标定原理和数学模型
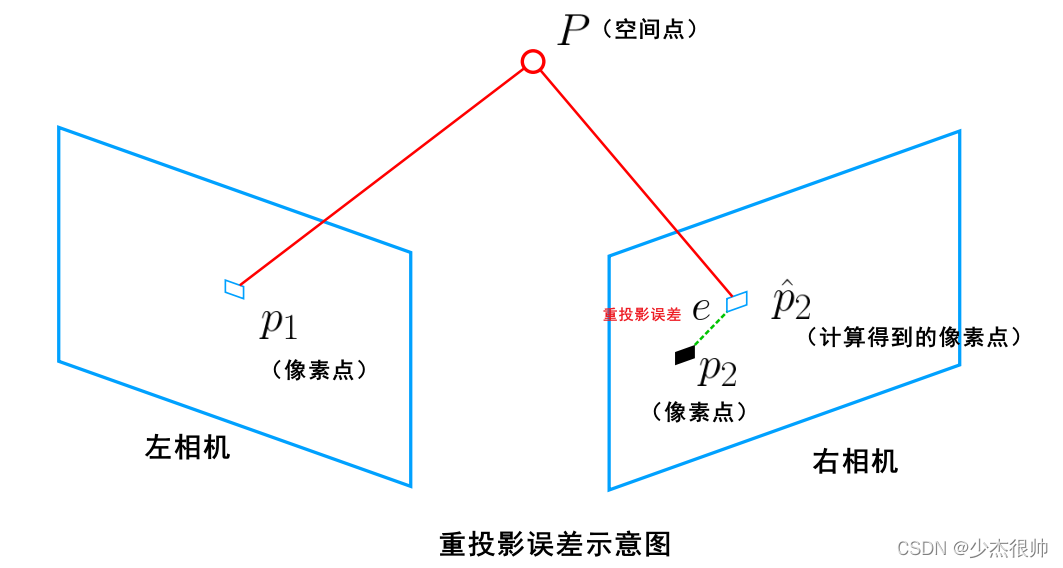
双目相机标定旨在确定相机内参和外参,内参包括焦距、主点坐标、畸变系数等,外参包括相机之间的相对位姿(平移和旋转)。标定过程通过获取一系列具有已知三维空间位置的标定点,并利用这些点在图像中的投影位置,建立相机成像模型与三维世界坐标之间的映射关系。
标定原理基于小孔成像模型,假设相机成像遵循透视投影模型。设相机坐标系为 O-xyz,其中 z 轴与光轴重合,图像平面为 xy 平面,则相机成像模型可以表示为:
```
[x, y, z] = K * [X, Y, Z, 1]^T
```
其中,[x, y, z] 为图像坐标,[X, Y, Z] 为世界坐标,K 为相机内参矩阵,表示为:
```
K =
[fx 0 cx]
[0 fy cy]
[0 0 1]
```
其中,fx 和 fy 为焦距,cx 和 cy 为主点坐标。
### 2.2 标定参数的含义和作用
**内参:**
* **焦距 (fx, fy):**焦距是相机光心到图像平面的距离,单位为像素。焦距决定了图像的放大倍率,较大的焦距会产生较小的视场角。
* **主点坐标 (cx, cy):**主点是图像平面上光轴与 xy 平面的交点,单位为像素。主点坐标表示图像的中心位置。
* **畸变系数:**畸变是由于镜头制造或组装过程中的缺陷造成的图像几何失真。常见的畸变类型包括径向畸变和切向畸变。
**外参:**
* **平移向量 (Tx, Ty, Tz):**平移向量表示相机坐标系相对于世界坐标系的平移量,单位为米。
* **旋转矩阵 (R):**旋转矩阵表示相机坐标系相对于世界坐标系的旋转变换,是一个 3x3 正交矩阵。
外参描述了相机之间的相对位姿,对于双目相机系统,需要标定两台相机的内参和外参。
# 3.1 标定过程和注意事项
**标定过程**
双目相机标定过程主要分为以下几个步骤:
1. **采集标定图像:**使用双目相机拍摄一张或多张包含棋盘格或其他标定图案的图像。
2. **检测和提取角点:**在标定图像中检测和提取棋盘格或标定图案的角点。
3. **计算相机内参:**根据角点的对应关系和标定图案的已知尺寸,计算每个相机的内参矩阵,包括焦距、主点坐标和畸变系数。
4. **计算外参:**根据内参矩阵和角点的对应关系,计算两个相机的相对位置和姿态,即外参矩阵。
**注意事项**
在进行双目相机标定时,需要特别注意以下事项:
- **标定图案的选择:**标定图案应具有良

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏全面深入地介绍了 OpenCV 双目相机标定的原理、算法和实践。从揭秘标定原理到实战应用,从解决常见问题到优化技巧,从误差来源到畸变校正,从特征提取到特征匹配,从相机模型到外参估计,从标定板设计到参数优化,从评估结果到工具使用,专栏涵盖了双目相机标定的方方面面。通过深入浅出的讲解和丰富的实战案例,专栏旨在帮助读者轻松掌握双目相机标定技术,解决 3D 视觉难题,并提升 OpenCV 双目相机标定的精度和效率。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
紧急揭秘!防止Canvas转换中透明区域变色的5大技巧
# 摘要
Canvas作为Web图形API,广泛应用于现代网页设计与交互中。本文从Canvas转换技术的基本概念入手,深入探讨了在渲染过程中透明区域变色的理论基础和实践解决方案。文章详细解析了透明度和颜色模型,渲染流程以及浏览器渲染差异,并针对性地提供了预防透明区域变色的技巧。通过对Canvas上下文优化
超越MFCC:BFCC在声学特征提取中的崛起

# 摘要
声学特征提取是语音和音频处理领域的核心,对于提升识别准确率和系统的鲁棒性至关重要。本文首先介绍了声学特征提取的原理及应用,着重探讨
Flutter自定义验证码输入框实战:提升用户体验的开发与优化

# 摘要
本文详细介绍了在Flutter框架中实现验证码输入框的设计与开发流程。首先,文章探讨了验证码输入框在移动应用中的基本实现,随后深入到前端设计理论,强调了用户体验的重
光盘刻录软件大PK:10个最佳工具,找到你的专属刻录伙伴
# 摘要
本文全面介绍了光盘刻录技术,从技术概述到具体软件选择标准,再到实战对比和进阶优化技巧,最终探讨了在不同应用场景下的应用以及未来发展趋势。在选择光盘刻录软件时,本文强调了功能性、用户体验、性能与稳定性的重要性。此外,本文还提供了光盘刻录的速度优化、数据安全保护及刻录后验证的方法,并探讨了在音频光盘制作、数据备份归档以及多媒体项目中的应用实例。最后,文章展望了光盘刻录技术的创
【FANUC机器人接线实战教程】:一步步教你完成Process IO接线的全过程
# 摘要
本文系统地介绍了FANUC机器人接线的基础知识、操作指南以及故障诊断与解决策略。首先,章节一和章节二深入讲解了Process IO接线原理,包括其优势、硬件组成、电气接线基础和信号类型。随后,在第三章中,提供了详细的接线操作指南,从准备工作到实际操作步骤,再到安全操作规程与测试,内容全面而细致。第四章则聚焦于故障诊断与解决,提供了一系列常见问题的分析、故障排查步骤与技巧,以及维护和预防措施
ENVI高光谱分析入门:3步掌握波谱识别的关键技巧

# 摘要
本文全面介绍了ENVI高光谱分析软件的基础操作和高级功能应用。第一章对ENVI软件进行了简介,第二章详细讲解了ENVI用户界面、数据导入预处理、图像显示与分析基础。第三章讨论了波谱识别的关键步骤,包括波谱特征提取、监督与非监督分类以及分类结果的评估与优化。第四章探讨了高级波谱分析技术、大数据环境下的高光谱处理以及ENVI脚本
ISA88.01批量控制核心指南:掌握制造业自动化控制的7大关键点

# 摘要
本文详细介绍了ISA88.01批量控制标准的理论基础和实际应用。首先,概述了ISA88.01标准的结构与组件,包括基本架构、核心组件如过程模块(PM)、单元模块(UM)
【均匀线阵方向图优化手册】:提升天线性能的15个实战技巧
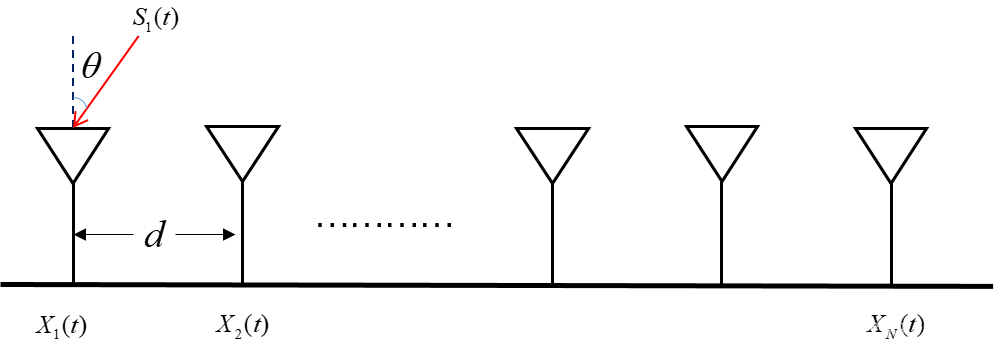
# 摘要
本文系统地介绍了均匀线阵天线的基础知识、方向图优化理论基础、优化实践技巧、系统集成与测试流程,以及创新应用。文章首先概述了均匀线阵天线的基本概念和方向图的重要性,然后
STM32F407 USB通信全解:USB设备开发与调试的捷径
# 摘要
本论文深入探讨了STM32F407微控制器在USB通信领域的应用,涵盖了从基础理论到高级应用的全方位知识体系。文章首先对USB通信协议进行了详细解析,并针对STM32F407的USB硬件接口特性进行了介绍。随后,详细阐述了USB设备固件开发流程和数据流管理,以及USB通信接口编程的具体实现。进一步地,针对USB调试技术和故障诊断、性能优化进行了系统性分析。在高级应用部分,重点介绍了USB主
车载网络诊断新趋势:SAE-J1939-73在现代汽车中的应用
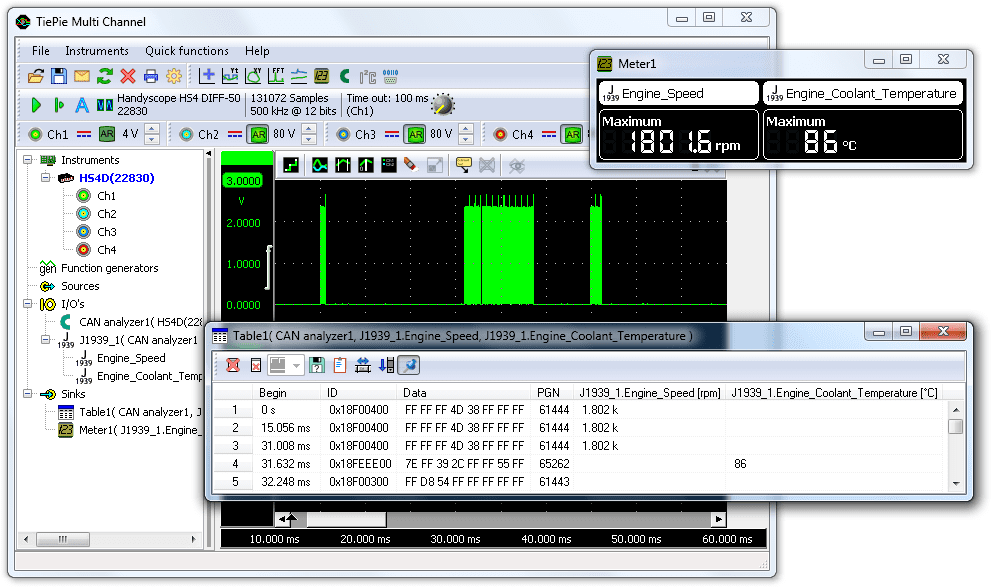
# 摘要
随着汽车电子技术的发展,车载网络诊断技术变得日益重要。本文首先概述了车载网络技术的演进和SAE-J1939标准及其子标准SAE-J1939-73的角色。接着深入探讨了SAE-J1939-73标准的理论基础,包括数据链路层扩展、数据结构、传输机制及诊断功能。文章分析了SAE-J1939-73在现代汽车诊断中的实际应用,车载网络诊断工具和设备,以
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )