【STM32F407资源管理攻略】:如何高效使用MicroPython管理硬件资源
发布时间: 2024-12-14 18:41:45 阅读量: 4 订阅数: 7 

microPython 在STM32F407板上的移植
参考资源链接:[STM32F407移植MicroPython实战指南](https://wenku.csdn.net/doc/6412b760be7fbd1778d4a15e?spm=1055.2635.3001.10343)
# 1. STM32F407与MicroPython简介
STM32F407系列微控制器以其高性能、低成本和丰富的功能成为嵌入式开发领域的明星产品。本章将介绍STM32F407的基本特性,并将其与MicroPython结合使用的基础知识。MicroPython是一种精简的Python 3实现,专为微控制器和嵌入式系统设计,它将Python的强大功能和易用性带到了硬件编程领域。通过将MicroPython部署到STM32F407上,开发者能够使用Python语言直接编写和运行脚本,极大降低开发难度,提高开发效率。
## 1.1 STM32F407的特性与应用领域
STM32F407集成了ARM® Cortex®-M4核心,运行频率高达168 MHz,具备浮点单元(FPU),支持广泛的通信接口和高性能模拟前端。因其卓越的处理能力和丰富的周边功能,广泛应用于工业控制、医疗设备、智能家居、无人机等需要复杂处理和实时反馈的领域。
## 1.2 MicroPython简介及其在STM32F407上的优势
MicroPython专为资源受限的微控制器设计,保留了Python的核心语法和特性,如动态类型、自动垃圾回收等。它预编译到STM32F407微控制器中后,开发者能够利用Python的高级语言特性进行快速开发,无需复杂的硬件操作。相较于传统的嵌入式开发,MicroPython简化了编程过程,使得原型制作和小批量生产更加便捷和高效。
# 2. MicroPython基础及环境搭建
## 2.1 MicroPython的基本概念和特性
### 2.1.1 MicroPython与标准Python的区别
MicroPython是Python 3编程语言的一个精简且高效的实现,旨在微控制器和受限环境如嵌入式系统中运行。它将Python语言的高度易用性和可读性带到了硬件编程领域,特别适用于资源有限的设备,如STM32F407微控制器。
与标准Python相比,MicroPython的主要区别在于它将Python语言的核心库进行了大幅度精简,并且直接在微控制器上运行。这意味着,它不仅移除了许多标准库中对于微控制器不重要的模块,还重新实现了部分模块以适应硬件的特性。
例如,在标准Python中,可以使用丰富的网络和图形界面库,但在MicroPython中,由于硬件资源的限制,可能只能使用最基础的网络支持和字符界面。此外,MicroPython在执行速度上要快于标准Python,这是因为MicroPython的运行环境是为了优化解释器执行效率而专门设计的。
### 2.1.2 MicroPython在STM32F407上的运行机制
MicroPython在STM32F407微控制器上的运行机制依托于它的轻量级虚拟机。首先,我们需要将MicroPython固件烧录到STM32F407的内部或外部存储器中。然后,通过特定的软件工具,如REPL(Read-Eval-Print Loop),用户可以直接与这个虚拟机进行交互。
MicroPython通过直接操作STM32F407的硬件寄存器来实现对外设的控制。开发者可以使用Python语言编写脚本,通过特定的库函数直接控制GPIO(通用输入输出)引脚,读取ADC(模拟数字转换器)值,控制PWM(脉冲宽度调制)信号等。这种方式不仅简化了开发过程,还大大缩短了产品的开发周期。
## 2.2 STM32F407开发环境的搭建
### 2.2.1 需要的硬件和软件工具
为了开发基于STM32F407和MicroPython的项目,我们需要准备一些硬件和软件工具:
- STM32F407开发板:用于运行MicroPython和编写代码。
- USB转串口适配器:用于连接开发板与电脑,实现代码上传和串口通信。
- 螺丝刀等基本工具:用于拆卸和组装开发板。
- MicroPython固件:官方提供的固件文件,用于烧录到开发板。
软件工具包括:
- STM32CubeMX:ST公司提供的图形化配置工具,可以用于配置微控制器的各种参数。
- STM32 ST-LINK Utility:ST公司提供的固件烧录工具,用于将MicroPython固件烧录到微控制器中。
- uPyCraft:专为MicroPython开发的集成开发环境,提供代码编辑、编译、上传等功能。
### 2.2.2 开发板的初始化与MicroPython固件烧录
在开始编写代码之前,首先要完成开发环境的初始化和MicroPython固件的烧录。
1. 使用STM32CubeMX配置开发板的参数,包括GPIO模式、时钟频率、中断等。
2. 通过ST-LINK Utility将配置好的固件下载到开发板中。
3. 重启开发板,连接USB转串口适配器至电脑。
4. 使用uPyCraft或其他串口终端工具打开开发板的REPL接口,这表明环境搭建完成。
## 2.3 MicroPython的交互式环境与脚本编写
### 2.3.1 交互式REPL的使用方法
REPL是MicroPython的交互式环境,允许用户即时输入Python代码并得到执行结果。通过连接开发板上的串口,我们可以启动REPL环境。
在REPL中输入代码后,可以直接看到输出结果。这使得测试和学习MicroPython变得非常方便。例如,输入`print("Hello, MicroPython!")`,回车后屏幕上就会显示这句话。
REPL还支持历史命令,使用`Ctrl+B`可以查看之前执行过的命令。此外,REPL中的代码可以被复制和粘贴,为编程提供了便利。
### 2.3.2 编写和运行MicroPython脚本
虽然REPL是学习和测试的好工具,但为了构建更复杂的应用程序,我们需要编写和运行脚本。uPyCraft IDE提供了一个方便的环境来编写、编辑和上传MicroPython脚本到开发板。
在uPyCraft中,编写代码后,可以通过`Ctrl+S`保存文件,并通过`F5`快捷键将其上传到开发板。上传完成后,可以使用REPL或IDE内置的串口终端运行脚本。
以下是一个简单的MicroPython脚本示例:
```python
import machine
import utime
# 初始化LED对应的GPIO引脚
led = machine.Pin(2, machine.Pin.OUT)
# 定义一个简单的闪烁LED的函数
def blink_led(times):
for i in range(times):
led.value(1) # 打开LED
utime.sleep(1) # 等待1秒
led.value(0) # 关闭LED
utime.sleep(1) # 等待1秒
# 运行LED闪烁函数,使LED闪烁10次
blink_led(10)
```
在上述代码中,首先导入了`machine`和`utime`库来操作硬件和进行时间控制,然后定义了LED的GPIO引脚,并编写了一个控制LED闪烁的函数`blink_led`。最后,调用该函数使LED闪烁10次。
通过运行这个脚本,我们可以观察到开发板上的LED灯按照指定的频率闪烁。这个过程体现了MicroPython编程的直观和易用性,也展示了它在嵌入式系统开发中的强大功能。
# 3. STM32F407硬件资源的编程接口
## 3.1 GPIO控制
### 3.1.1 GPIO的工作模式和配置
STM32F407的通用输入输出端口(GPIO)是微控制器中最基本且广泛使用的接口。通过编程这些端口,可以控制连接到微控制器引脚的外部设备,如LED灯、按钮、传感器等。GPIO有五种基本的工作模式:
- 输入模式(Floating Input, Pull-up Input, Pull-down Input)
- 输出模式(Push-pull, Open-drain)
- 复用功能模式(Alternate function mode)
- 模拟模式(Analog mode)
每种模式提供了不同的电气特性来适应不同的应用场景。配置GPIO包括选择模式、设置输出类型、速度、上拉/下拉电阻等。
以下是配置STM32F407 GPIO为输出模式的一个基本例子:
```python
from machine import Pin
from time import sleep
# 初始化Pin对象,设置为输出模式,没有上拉或下拉电阻
led_pin = Pin(13, Pin.OUT)
# 控制LED灯亮/灭
while True:
led_pin.value(1) # 使LED亮
sleep(1) # 等待1秒
led_pin.value(0) # 使LED灭
sleep(1) # 等待1秒
```
在这个例子中,我们使用了`machine`模块中的`Pin`类来操作GPIO。首先,我们创建了一个`Pin`对象,指定了GPIO引脚号和模式。`Pin(13, Pin.OUT)`指定了引脚号为13并且设置为输出模式。然后,通过循环控制LED的开关。
### 3.1.2 编程实现LED控制和按键读取
通过GPIO编程,我们可以实现对LED灯的控制和读取按键输入。以下是一个基本的示例,说明如何通过MicroPython控制LED灯并读取按键状态:
```python
from machine import Pin
import time
# LED配置为输出模式
led = Pin(13, Pin.OUT)
# 按键配置
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 MicroPython 在 STM32F407 板上的移植过程,从硬件兼容性到软件环境搭建,提供了一步到位的移植教程。此外,还介绍了 MicroPython 在 STM32F407 上的外设驱动开发、实时操作系统集成、低功耗编程技巧、接口对接和高级应用。专栏还提供了资源管理攻略,帮助开发者高效使用 MicroPython 管理硬件资源。最后,通过案例分析和性能测试,评估了 MicroPython 在 STM32F407 上的兼容性、性能和安全性,为嵌入式开发者提供了全面深入的 MicroPython 移植指南。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
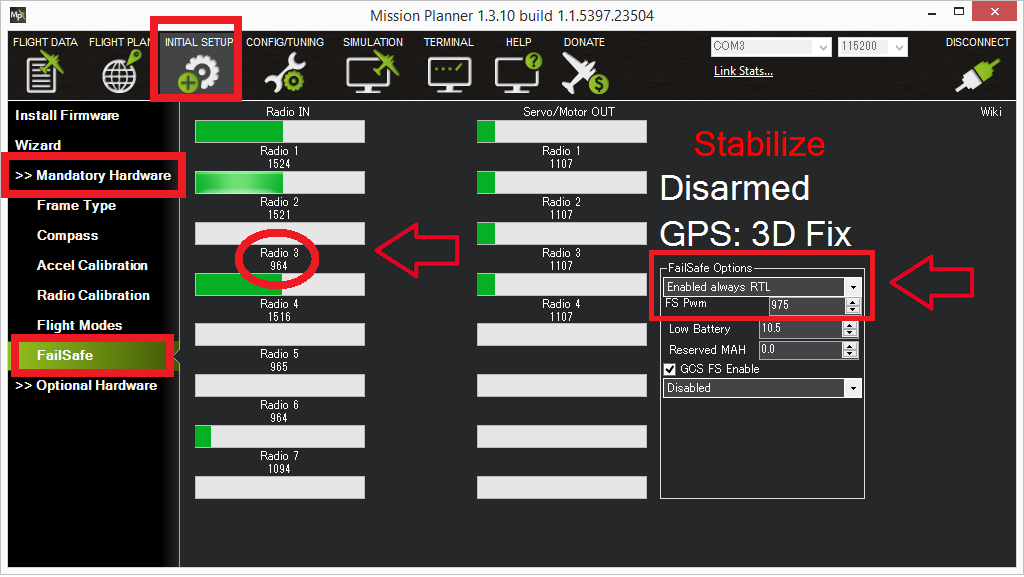
【Mission Planner高级定制指南】:掌握自定义功能的秘诀
参考资源链接:[Mission Planner全参数中文详解:新手调参指南](https://wenku.csdn.net/doc/5vpizp902i?spm=1055.2635.3001.10343)
# 1. Mission Planner软件概述
Mission Planner 是一款为无人机(UAV)设计的开源地面控制站软件,它提供了与飞行器通信、规划任务、监视飞行状态和分析飞行
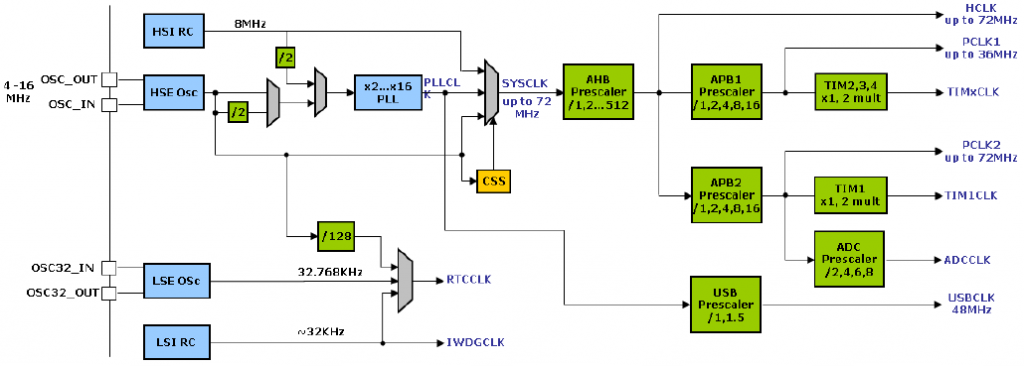
STM32F1时钟配置终极指南:HAL库下的系统时钟优化策略
参考资源链接:[STM32F1 HAL库详解与应用指南](https://wenku.csdn.net/doc/6412b754be7fbd1778d49e9c?spm=1055.2635.3001.10343)
# 1. STM32F1时钟系统概述
## 1.1 STM32F1时钟系统简介
STM32F1系列微控制器(MCU)的时钟系统是其核心功能之一
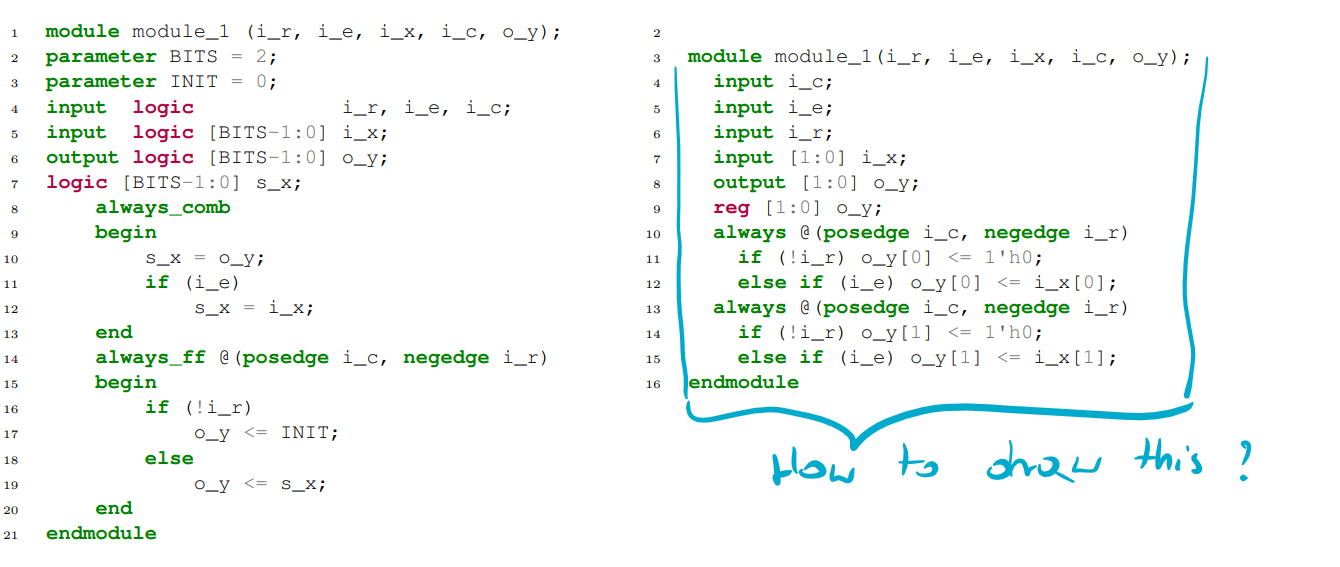
Verilog进阶必修课:揭秘复杂时序问题的处理之道
参考资源链接:[Verilog时序检查详解:$setup、$hold与$setuphold](https://wenku.csdn.net/doc/848qwsffrf?spm=1055.2635.3001.10343)
# 1. Verilog语言基础回顾
## 1.1 Verilog语言概述
Verilog是一种硬件描述语言(HDL),广泛用于数字逻辑电路的设计和仿真。它的语法类似于C语言,易于学习
【R语言高级应用详解】:掌握这些函数编写与代码复用技巧,提升工作效率
参考资源链接:[RStudio使用指南:提升R语言编程效率](https://wenku.csdn.net/doc/6412b71bbe7fbd1778d491b9?spm=1055.2635.3001.10343)
# 1. R语言基础与高级特性
## 1.1 R语言概述
R语言是一种用于统计分析、图形表示和报告的编程语言和软件环境。自从1997年被开发以来,R语言已经发展成为一个
Fluent PBM模型与工业应用:实战案例分析与最佳实践

参考资源链接:[fluent软件PBM模型(群体平衡方程)帮助文档](https://wenku.csdn.net/doc/6412b5cfbe7fbd177
HC6800-ES-V2.0布线优化:打造高速网络通信的秘诀
参考资源链接:[HC6800-ES-V2.0开发板详细电路原理图解析](https://wenku.csdn.net/doc/64642fc85928463033c1b2c3?spm=1055.2635.3001.10343)
# 1. HC6800-ES-V2.0布线系统的概述
## 1.1 HC6800-ES-V2.0的定义与功能
HC6800-ES-V2.0布线系统是业界先进的高速数据通讯布线解决方案,专门设计用于满足当前以及未来数据中心的需求。它是一种结构化布线系统,支持多协议,能够以高效、稳定的方式传输数据和信号。通过其模块化设计,HC6800-ES-V2.0可提供灵活的安装、升级
【eDP 1.3 协议精讲】:技术要点全解析与实战指南

参考资源链接:[eDP 1.3协议:嵌入式显示应用的标准化接口标准](https://wenku.csdn.net/doc/6401ad10cc
【银河麒麟V10终极指南】:Windows exe应用在Linux环境下的完美运行术

参考资源链接:[银河麒麟V10桌面版借助CrossOver安装Windows exe应用指南](https://wenku.csdn.net/doc/30vy0e1qdw?spm=1055.2635.3001.10343)
# 1. 银河麒麟V10概述与系统架构
## 1.1 系统架构简介
银河麒麟V10是基于Linux内核开发的操作系统
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )