【STM32F407的MicroPython编程】:外设驱动开发与实时操作系统集成
发布时间: 2024-12-14 18:25:04 阅读量: 6 订阅数: 7 

STM32L496实现基于MicroPython方式驱动【RT-Thread工程,支持STM32L4系列单片机】.zip

参考资源链接:[STM32F407移植MicroPython实战指南](https://wenku.csdn.net/doc/6412b760be7fbd1778d4a15e?spm=1055.2635.3001.10343)
# 1. STM32F407的MicroPython概述
## 1.1 什么是STM32F407
STM32F407系列是STMicroelectronics(意法半导体)生产的高性能ARM Cortex-M4微控制器。这些处理器在工业和商业应用中非常受欢迎,得益于其丰富的外设集成、高性能处理能力以及广泛的生态系统支持。
## 1.2 MicroPython简介
MicroPython是Python 3编程语言的精简实现,专为微控制器和其他小系统设计。它旨在提供Python语言的易用性,同时减少对系统资源的需求。与传统的嵌入式C语言开发相比,MicroPython提供了更快速的开发周期和更简洁的代码。
## 1.3 STM32F407与MicroPython结合的优势
将STM32F407与MicroPython结合,能够让开发者利用Python的简洁语法和强大的库来快速实现复杂的功能。此外,Python社区丰富的资源和工具为STM32F407平台上的应用开发提供了额外的支持。
通过这篇文章,我们将详细探讨STM32F407的MicroPython编程基础、固件安装、基础语法、外设驱动开发、实时操作系统集成以及高级应用实践。无论你是嵌入式系统的新手还是资深开发者,都能够在本系列文章中找到有价值的信息。
# 2. MicroPython环境搭建与基础编程
## 2.1 STM32F407的MicroPython固件安装
### 2.1.1 下载与安装步骤
首先,需要从官方网站或者授权的第三方资源下载适合STM32F407的MicroPython固件。确保下载的固件版本与您的开发板兼容。通常情况下,您可能需要一个名为`STM32CubeProgrammer`的工具来帮助烧写固件到开发板上。
接下来是固件的烧写过程,这里以Windows操作系统为例:
1. 打开`STM32CubeProgrammer`程序。
2. 通过USB连接您的开发板到电脑。
3. 在`STM32CubeProgrammer`中选择您的开发板型号。
4. 选择“Connect”连接到开发板。
5. 在“Firmware Upgrade”模块中找到您下载的固件文件。
6. 选择“Upgrade”开始烧写过程。
7. 等待烧写完成,显示“Upgrade Success”表示成功。
完成以上步骤后,STM32F407开发板将会运行MicroPython环境。接下来,需要安装必要的软件,使得我们能够通过电脑与开发板通信,进行代码的编写、上传和执行。
### 2.1.2 开发环境配置
对于使用Windows的用户,以下是一些基本的开发环境配置步骤:
1. **安装Python解释器**:首先确保在您的PC上安装了Python,因为我们将使用它来编写代码并运行MicroPython脚本。
2. **安装串口通信软件**:安装如`PuTTY`或`Tera Term`等串口通信软件,用于与开发板进行串口通信。
3. **安装代码编辑器**:推荐使用`Visual Studio Code`,并安装`MicroPython`扩展,以便更好地编写和管理代码。
4. **设置串口连接**:配置串口连接参数,比如波特率(通常为115200),数据位、停止位等。
5. **测试连接**:通过串口通信软件尝试连接开发板,如果能成功发送和接收数据,表示开发环境已经配置完毕。
完成环境配置后,您将能够开始编写MicroPython代码并将其上传到STM32F407开发板。
## 2.2 MicroPython基础语法和结构
### 2.2.1 数据类型与变量
MicroPython支持常用的数据类型,如整型(int)、浮点型(float)、字符串(str)、布尔型(bool)以及None类型。变量在MicroPython中是动态类型,不需要显式声明类型。例如,以下代码展示了如何使用变量:
```python
# 定义变量
a = 10
b = 10.5
c = 'Hello MicroPython'
d = True
# 打印变量值
print(a)
print(b)
print(c)
print(d)
```
在这段代码中,我们定义了几种基本类型的变量并打印它们的值。MicroPython中不需要指定数据类型,解释器会根据变量赋值的类型自动推断。
### 2.2.2 控制流语句
控制流语句是编程中用于控制程序执行顺序的关键工具,MicroPython支持常见的控制流语句,如`if`、`for`、`while`和`try...except`等。例如,使用`if`语句进行简单的条件判断:
```python
if a > b:
print('a is greater than b')
elif a < b:
print('a is less than b')
else:
print('a is equal to b')
```
在上面的代码块中,我们进行了一个简单的条件判断。`if`、`elif`、`else`语句块根据变量`a`和`b`的比较结果输出相应的信息。
接下来是循环控制语句的使用,比如`for`循环可以遍历序列(如列表、元组、字符串)中的每个元素:
```python
for i in range(5):
print(i)
```
以上代码块会输出从0到4的整数,`range`函数生成一个序列。
### 2.2.3 函数定义与调用
在MicroPython中,定义和调用函数也遵循Python的标准方式。函数使用`def`关键字来定义,并且需要指定参数(如果有的话)。例如,定义一个函数来计算两个数的和:
```python
def add_numbers(num1, num2):
return num1 + num2
# 调用函数
result = add_numbers(10, 20)
print(result) # 输出:30
```
上述代码展示了如何定义一个名为`add_numbers`的函数,它接受两个参数,并返回它们的和。然后我们调用这个函数,并打印返回结果。
## 2.3 MicroPython的IO操作
### 2.3.1 引脚操作与控制
MicroPython允许直接操作硬件引脚,可以配置GPIO引脚为输入或输出模式,并控制其高低电平。下面的代码展示了如何定义一个LED闪烁的功能:
```python
from machine import Pin
import time
# 定义LED引脚,GPIO引脚号需要根据实际开发板来确定
led_pin = Pin('A0', Pin.OUT)
def toggle_led(pin):
pin.value(1) # 设置引脚高电平
time.sleep(0.5) # 等待0.5秒
pin.value(0) # 设置引脚低电平
time.sleep(0.5) # 等待0.5秒
while True:
toggle_led(led_pin)
```
在这段代码中,我们首先从`machine`模块导入`Pin`类,并初始化了一个GPIO引脚。然后定义了一个切换LED状态的函数,并通过无限循环持续执行该函数,实现LED闪烁的效果。
### 2.3.2 串口通信基础
串口通信是微控制器中常用的一种通信方式。在MicroPython中,可以通过`machine`模块的`UART`类进行串口通信。以下是串口通信的基本设置和数据发送示例:
```python
from machine import UART
import time
# 初始化UART,指定RX和TX引脚,波特率,字节大小,停止位和校验位
uart = UART(1, 9600, timeout=1000)
# 发送字符串数据
uart.write('Hello UART')
# 接收数据,最多接收10个字节
data = uart.read(10)
print(data)
```
在该示例中,我们创建了一个`UART`对象,并指定了必要的参数。然后通过`write`方法发送数据,并通过`read`方法接收数据。
### 2.3.3 SPI与I2C总线交互
SPI(Serial Peripheral Interface)和I2C(Inter-Integrated Circuit)是两种常见的串行通信协议,它们在嵌入式系统中被广泛使用。MicroPython提供了支持这些协议的接口。以下是SPI通信的一个基础示例:
```python
from machine import SPI, Pin
# 初始化SPI总线,使用SCK, MISO, MOSI引脚,并设置模式和波特率
spi = SPI(1, baudrate=100000, polarity=0, phase=0, sck=Pin(14), mosi=Pin(13), miso=Pin(12))
# 使用SPI发送接收数据
spi.write('Hello SPI')
rx_data = spi.read(10)
print(rx_data)
```
在这个代码块中,我们创建了一个`SPI`对象,并指定了SPI总线相关的参数。通过`write`方法发送数据,通过`read`方法接收数据。
I2C通信同样在MicroPython中得到了支持。这里是一个简单的I2C通信示例:
```python
from machine import I2C, Pin
# 初始化I2C总线,使用SDA和SCL引脚,并设置频率
i2c = I2C(0, scl=Pin(18), sda=Pin(19), freq=400000)
# 指定从设备地址和寄存器地址,读取数据
data = i2c.readfrom_mem(0x50, 0x01, 3)
print(data)
```
在这个代码块中,我们创建了一个`I2C`对象,并通过`readfrom_mem`方法从指定设备和寄存器地址读取数据。
通过这些基本的IO操作,开发者能够对STM32F407进行简单的硬件控制,为后续的外设驱动开发和高级应用实践打下基础。
# 3. STM32F407的外设驱动开发
## 3.1 定时器和PWM控制
### 3.1.1 定时器的初始化与配置
在STM32F407的外设驱

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 MicroPython 在 STM32F407 板上的移植过程,从硬件兼容性到软件环境搭建,提供了一步到位的移植教程。此外,还介绍了 MicroPython 在 STM32F407 上的外设驱动开发、实时操作系统集成、低功耗编程技巧、接口对接和高级应用。专栏还提供了资源管理攻略,帮助开发者高效使用 MicroPython 管理硬件资源。最后,通过案例分析和性能测试,评估了 MicroPython 在 STM32F407 上的兼容性、性能和安全性,为嵌入式开发者提供了全面深入的 MicroPython 移植指南。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
星三角降压启动的秘密揭露:10个案例,10大技巧,全面提升电气性能
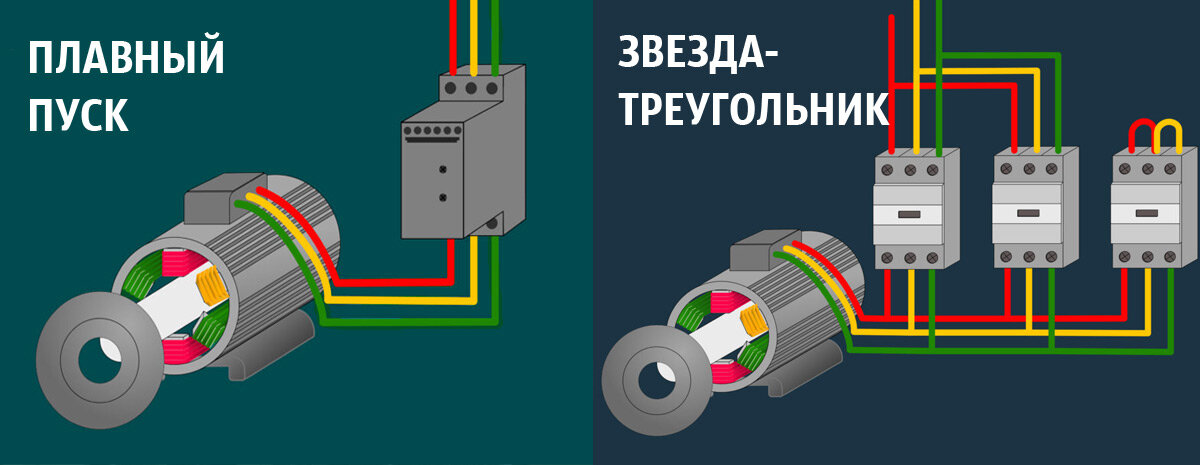
参考资源链接:[星三角降压启动plc梯形图电路图](https://wenku.csdn.net/doc/6412b783be7fbd1778d4a91d?spm=1055.2635.3001.10343)
# 1. 星三角降压启动概述
星三角降压启动是工业电动机启动方式中常见的一种方法,通
【SAP PPDS数据模型深度剖析】:全面解读数据结构与流程框架

参考资源链接:[SAP PPDS 的实施挑战](https://wenku.csdn.net/doc/v22sg2vs83?spm=1055.2635.3001.10343)
# 1. SAP PPDS数据模型概述
在当今企业资源规划(ERP)系统中,生产计划和详
Python变量与数据类型:掌握这10个技巧,让你的代码更高效

参考资源链接:[《Python语言程序设计》课后习题解析与答案](https://wenku.csdn.net/doc/5guzi5pw84?spm=1055.2635.3001.10343)
# 1. Python变量与数据类型基础
Python 作为一种解释型、面
Gabi软件新手终极指南:掌握12大核心技能,成为专家

参考资源链接:[GaBi4入门教程:全面解析软件操作与数据库应用](https://wenku.csdn.net/doc/4u2agq0o4r?spm=1055.2635.3001.10343)
# 1. Gabi软件介绍和基础操作
在信息时代,数据分析工具是企业不可或缺的资产。Gabi软件作为其中的佼佼者,凭借其强大的数据处理能力和用户友好的操作界面在业内广受欢迎。本章将对Gabi软件进行初步介绍,并带领读者完
【MQL4机器人实战】:构建你的高效自动化交易系统
参考资源链接:[MQL4中文手册:详解语法、函数与最新修订](https://wenku.csdn.net/doc/6412b745be7fbd1778d49b24?spm=1055.2635.3001.10343)
# 1. MQL4机器人概述
## MQL4机器人简介
MQL4机器人是基于MetaQuotes La
Yamaha机器人传感器应用:3大技巧提升感知能力,专家不传之谜

参考资源链接:[Yamaha机器人编程手册:RCX控制器与4轴机械手命令详解](https://wenku.csdn.net/doc/3buyfmee8t?spm=1055.2635.3001.10343)
# 1. Yamaha机器人传感器应用概述
## 简介
Yamaha机器人传感器,作为机器人自动化与智能化的核心
【计算机系统结构基础】:掌握核心概念与术语,成为领域内的高手
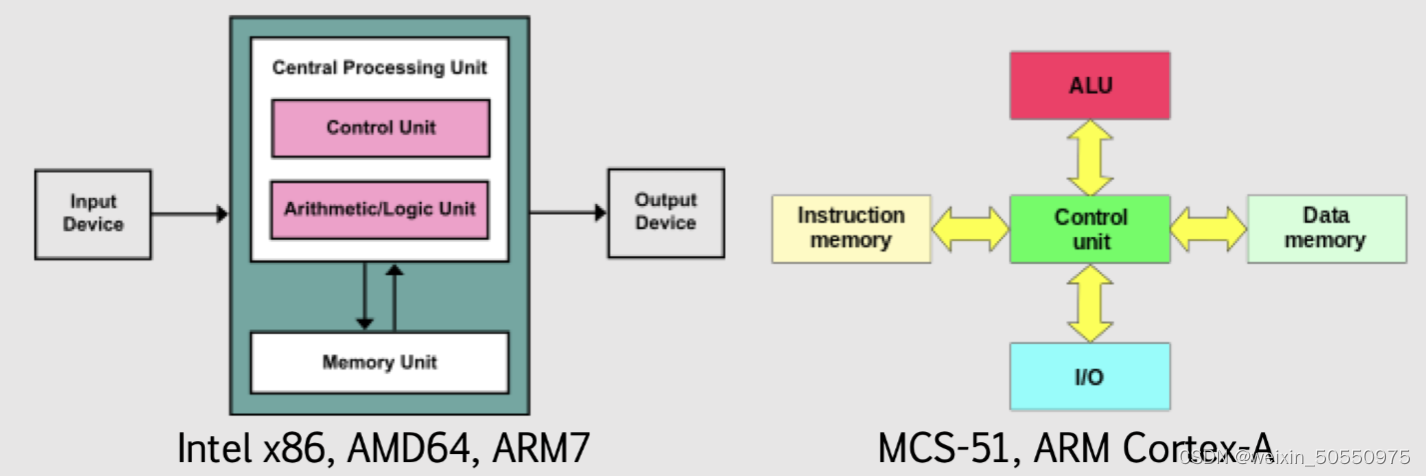
参考资源链接:[计算机系统结构课后习题答案-完整版-李学干版-word可编辑.doc](https://wenku.csdn.net/doc/6401acedcce7214c316eda82?spm=1055.2635.3001.10343)
# 1. 计算机系统结构概述
## 1.1 基本概念
计算机系统结构是研究计算机硬件和软件的组织方式,以及它们之间的协作方式。它涉及到硬件组件的设计、互
通信协议转换器选择与使用:西门子 S7-1200 与 ABB ACS510 的数据校验与同步

参考资源链接:[S7-1200 PLC通过Modbus与ABB ACS510变频器通信实战](https://wenku.csdn.net/doc/6412b794be7fbd1778d
拼多多盈利质量透视:深度剖析财务报表与增长驱动力
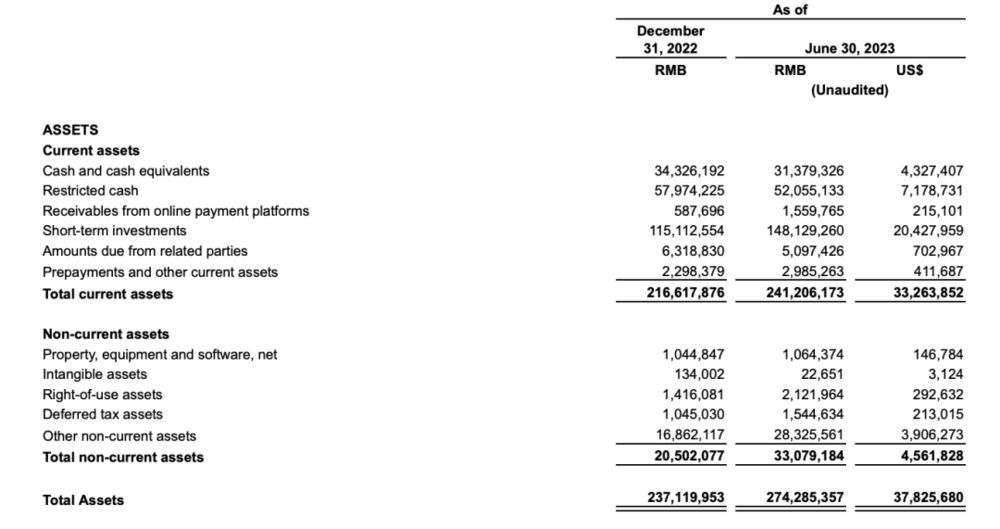
参考资源链接:[拼多多财务报表分析:揭示电商巨头的成功秘诀](https://wenku.csdn.net/doc/1hd4gcrewb?spm=1055.2635.3001.10343)
# 1. 拼多多财务报表基础分析
拼多多作为一家在电子商务领域迅速崛起的公司,其财务报表是评估其经营状况和市场表现的
快速掌握MATLAB xcorr函数

参考资源链接:[MATLAB中xcorr函数详解:计算随机过程互相关序列](https://wenku.csdn.net/doc/6i14uskrnb?spm=1055.2635.3001.
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )