【嵌入式开发者的MicroPython秘籍】:STM32F407全攻略
发布时间: 2024-12-14 18:11:15 阅读量: 5 订阅数: 7 

嵌入式综合项目:STM32F407基于ARM_Cortex-M4处理器,QT5.9.9客户端,
参考资源链接:[STM32F407移植MicroPython实战指南](https://wenku.csdn.net/doc/6412b760be7fbd1778d4a15e?spm=1055.2635.3001.10343)
# 1. MicroPython简介与安装
## MicroPython简介
MicroPython是Python 3编程语言的一个精简且高效的实现,专为微控制器和嵌入式系统而设计。它允许开发者直接在硬件上编写Python脚本,从而快速实现原型设计和开发过程。与传统的C/C++相比,MicroPython显著降低了学习曲线,提高了开发效率,尤其适用于硬件编程和物联网(IoT)应用开发。
## MicroPython的安装
要在嵌入式设备上安装MicroPython,通常有以下几种方法:
1. 使用预编译的固件:许多微控制器板都支持直接下载和安装预编译的MicroPython固件。例如,对于ESP8266或ESP32等热门开发板,可以通过简单的命令行工具进行固件烧录。
2. 从源代码编译:对于不提供现成固件的硬件平台,可以通过下载MicroPython的源代码并根据具体硬件平台进行编译。这一过程涉及到的工具链和编译命令较为复杂,但提供了更多的定制性。
3. 使用集成开发环境(IDE):某些IDE(如Thonny Python IDE)提供了对MicroPython的原生支持,可以简化安装和编程流程。
下面是一个简单的示例,展示如何将MicroPython固件烧录到ESP32开发板上:
```bash
esptool.py --chip esp32 --port /dev/ttyUSB0 erase_flash
esptool.py --chip esp32 --port /dev/ttyUSB0 --baud 460800 write_flash -z 0x1000 /path/to/micropython/firmware.img
```
以上命令中,`esptool.py`是用于ESP系列开发板的官方固件烧录工具,`/dev/ttyUSB0`是Linux系统下的串行端口,根据操作系统的不同,这个端口可能有不同的标识。`/path/to/micropython/firmware.img`需要替换为你下载的固件文件路径。
安装好MicroPython后,通常会有一个REPL(Read-Eval-Print Loop)环境等待你的交互,你可以直接在REPL中输入Python命令进行测试和验证。
# 2. STM32F407的MicroPython编程基础
### 3.1 MicroPython脚本语言特性
#### 3.1.1 变量和基本数据类型
在MicroPython中,变量的使用与其他高级编程语言大同小异。用户无需显式声明变量类型,变量类型在赋值时自动确定。基本数据类型包括整型、浮点型、字符串、布尔型等。
```python
# 整型
num_int = 123
# 浮点型
num_float = 123.456
# 字符串
text = "Hello MicroPython"
# 布尔型
flag = True
```
如上代码块所示,变量`num_int`、`num_float`、`text`和`flag`分别为整型、浮点型、字符串和布尔型数据。整型和浮点型用于数值计算,字符串用于文本处理,布尔型用于逻辑判断。
#### 3.1.2 控制结构和函数定义
控制结构是编程中用于控制程序流程的语句。在MicroPython中,常见的控制结构包括if-else条件语句、for和while循环语句。函数是组织好的、可重复使用的代码块,用于执行特定任务。
```python
# 控制结构示例
if num_int > 100:
print("Number is greater than 100")
else:
print("Number is less than 100")
# 函数定义示例
def add_numbers(a, b):
return a + b
# 调用函数
sum = add_numbers(5, 7)
print("Sum of numbers:", sum)
```
在上述代码块中,展示了if-else条件语句用于比较操作,并根据结果打印不同信息。`add_numbers`函数定义了两个输入参数`a`和`b`,返回它们的和。函数调用时将两个数字作为参数传入,并打印计算结果。
### 3.2 输入输出(I/O)操作
#### 3.2.1 GPIO控制和外设接口
STM32F407微控制器的通用输入输出(GPIO)引脚在与MicroPython配合使用时,提供了丰富的外设接口。开发者可以通过配置GPIO引脚模式、设置引脚电平等操作实现与各种外部设备的交互。
```python
from machine import Pin
import time
# 配置GPIO为输出模式,并命名为"LED_PIN"
led_pin = Pin(2, Pin.OUT)
# 切换LED状态
led_pin.value(1) # 开启LED灯
time.sleep(1) # 等待1秒
led_pin.value(0) # 关闭LED灯
```
在以上代码块中,我们使用`machine`库中的`Pin`类来定义一个GPIO引脚对象,并将其配置为输出模式。通过改变该引脚的值(0代表低电平,1代表高电平)来控制LED灯的开关。
#### 3.2.2 串口通信和数据交换
串口通信是微控制器之间常见的通信方式,STM32F407支持多种串口通信接口。在MicroPython中,开发者可以使用`UART`类来实现串口通信,从而实现数据的发送和接收。
```python
from machine import UART
# 初始化串口对象,指定TX和RX引脚及波特率
uart = UART(0, 9600, tx=Pin(1), rx=Pin(2))
# 发送数据
uart.write(b'Hello UART')
# 接收数据
if uart.any():
data = uart.read(10)
print("Received:", data)
```
在上述代码块中,我们创建了一个UART对象,设置波特率为9600,并指定发送(TX)和接收(RX)引脚。然后通过`write`方法发送一个字节串`'Hello UART'`,使用`read`方法来接收数据并打印。
### 3.3 中断和定时器管理
#### 3.3.1 中断的配置和处理
中断用于响应外部或内部事件,STM32F407的中断系统允许程序在执行其他任务时,能够及时响应外部事件。在MicroPython中配置中断需要指定中断号、触发条件和中断服务程序。
```python
from machine import Pin
def int_handler(pin):
print("Interrupt triggered!")
# 初始化中断引脚
button_pin = Pin(0, Pin.IN)
button_pin.irq(trigger=Pin.IRQ_FALLING, handler=int_handler)
while True:
# 主循环中的其他任务
pass
```
此代码块展示了一个中断处理示例,其中`button_pin.irq`方法用于配置中断。当检测到下降沿信号(即按钮被按下)时,将触发`int_handler`函数,打印"Interrupt triggered!"。
#### 3.3.2 定时器的创建和使用
STM32F407提供了多个硬件定时器,通过MicroPython,开发者可以创建软件定时器来执行周期性任务。硬件定时器可以用于精确时间控制,比如定时任务、时间同步等。
```python
from machine import Timer
# 创建定时器实例,编号为0
timer = Timer(0)
# 定义定时器中断回调函数
def timer_callback(t):
print("Timer triggered!")
# 定时器每隔1秒触发一次
timer.init(period=1000, callback=timer_callback)
while True:
# 主循环中的其他任务
pass
```
在上述代码中,我们创建了一个名为`timer`的定时器实例,设置为每隔1秒触发一次定时器中断,并调用`timer_callback`函数。在定时器的回调函数中可以执行需要周期性执行的任务。
下表展示了STM32F407的几个常用定时器及其参数说明:
| 定时器 | 定时范围(单位:秒) | 精度(单位:微秒) | 备注 |
| :----: | :------------------: | :----------------: | :--: |
| TIM1 | 0 - 65535 | 0.001 | 高级定时器 |
| TIM2 | 0 - 65535 | 0.001 | 通用定时器 |
| TIM3 | 0 - 65535 | 0.001 | 通用定时器 |
| TIM4 | 0 - 65535 | 0.001 | 通用定时器 |
定时器的精确配置需要根据应用场景和精度要求来选择合适的定时器和相关参数。
# 3. STM32F407的MicroPython编程基础
## 3.1 MicroPython脚本语言特性
### 3.1.1 变量和基本数据类型
在MicroPython中,变量的定义非常简单,不需要指定类型,可以直接赋值使用。基本数据类型包括整型(int)、浮点型(float)、字符串(str)、布尔型(bool)、None等。
```python
# 示例代码
a = 10 # 整型变量
b = 10.5 # 浮点型变量
c = "Hello" # 字符串变量
d = True # 布尔型变量
e = None # 空值
```
由于MicroPython是Python的一个子集,它继承了Python在语法上的简洁性。基本的数据类型操作和Python基本一致,如字符串的连接、整数和浮点数的数学运算等。
### 3.1.2 控制结构和函数定义
控制结构主要涉及到条件判断和循环结构,函数定义则涉及到函数的声明和参数传递。下面是一些基本的示例。
```python
# 条件判断示例
if a > b:
print("a is greater than b")
# 循环结构示例
for i in range(10):
print(i)
# 函数定义示例
def add(x, y):
return x + y
```
控制结构允许我们在编写程序时根据不同的条件执行不同的代码块,使得程序具有更加灵活和动态的行为。函数定义则有助于我们编写模块化的代码,使程序更加清晰和易于维护。
## 3.2 输入输出(I/O)操作
### 3.2.1 GPIO控制和外设接口
STM32F407的GPIO(通用输入输出)引脚可以配置为输入、输出、模拟或者特殊功能引脚。使用MicroPython进行GPIO操作是非常直接的。下面是一个简单的示例代码:
```python
from pyb import Pin
# 初始化一个GPIO引脚为输出模式,并输出高电平
pin = Pin('B4', Pin.OUT_PP)
pin.value(1)
# 切换GPIO引脚的状态为低电平
pin.value(0)
```
在这个例子中,我们首先从pyb模块导入了Pin类。然后创建一个Pin实例,指定引脚号和模式。最后,通过调用value方法来控制引脚的电平状态。
### 3.2.2 串口通信和数据交换
串口通信在嵌入式设备中十分常见,用于与其他设备或计算机进行数据交换。在MicroPython中,可以方便地进行串口的初始化和数据的发送接收。示例如下:
```python
from pyb import UART
# 初始化UART对象,指定使用的串口和参数
uart = UART(1, 9600)
# 发送字符串数据
uart.send('Hello UART')
# 接收数据
data = uart.recv(100)
```
这里,我们首先导入了pyb模块下的UART类,并创建了一个UART对象,配置了对应的串口号和波特率。然后使用send方法发送数据,使用recv方法接收数据。
## 3.3 中断和定时器管理
### 3.3.1 中断的配置和处理
中断是微控制器响应外部事件的一种方式。在MicroPython中,可以通过设置GPIO引脚的中断模式来实现中断事件的处理。下面是一个简单的示例:
```python
from pyb import Pin, ExtInt
# 定义一个回调函数,当中断触发时执行
def callback(arg):
print("Interrupt callback!")
# 配置一个外部中断,指定引脚、触发方式和回调函数
extint = ExtInt(Pin('B2'), ExtInt.IRQ_RISING, Pin.PULL_NONE, callback)
# 主程序循环,等待中断发生
while True:
pass
```
在这个例子中,我们首先定义了一个回调函数。然后创建了一个ExtInt对象,指定了引脚、触发方式、上拉电阻状态以及回调函数。最后,主程序进入一个无限循环,等待中断事件发生。
### 3.3.2 定时器的创建和使用
定时器是微控制器中重要的功能,用于实现时间的精确控制。在MicroPython中,我们可以创建定时器并在定时器事件中执行任务。
```python
from pyb import Timer
# 创建一个定时器对象
timer = Timer(1)
# 定义一个回调函数,定时器触发时执行
def callback(t):
print("Timer callback!")
# 配置定时器周期性触发,指定时间间隔和回调函数
timer.init(period=2000, callback=callback)
```
这个示例中,首先创建了一个Timer对象。然后定义了一个回调函数,用于在定时器中断触发时被调用。最后,使用init方法初始化定时器,设置周期时间,并指定回调函数。
以上内容介绍了STM32F407的MicroPython编程基础中的脚本语言特性、输入输出操作以及中断和定时器管理。这些是进行嵌入式开发时的基础工具和方法。接下来的章节将继续深入探讨外围设备操作和高级应用开发,以及如何将理论知识应用到实际项目中去。
# 4. STM32F407的外围设备操作
## 4.1 ADC和DAC转换应用
### 4.1.1 模拟信号采集
模拟数字转换器(ADC)是微控制器中常见的外围设备,它负责将模拟信号转换为数字信号,这对于需要处理来自各种传感器的模拟数据的应用程序至关重要。STM32F407微控制器具有高性能的12位ADC模块,该模块通常能够达到2.4 MSPS(百万样本每秒)的采样率。
在MicroPython中使用STM32F407的ADC进行模拟信号采集的基本步骤如下:
1. 导入必要的模块。
2. 初始化ADC。
3. 配置通道和采样时间。
4. 开始转换。
5. 读取转换结果。
下面是一段示例代码,演示了如何配置STM32F407的ADC来读取一个模拟输入:
```python
from machine import ADC, Pin
import time
# 创建ADC对象,并指定ADC通道
adc = ADC(Pin(0)) # 假设ADC通道0已连接到物理引脚0
# 设置ADC为12位分辨率
adc.atten(ADC.ATTN_11DB)
# 开始持续的连续转换模式
adc.start()
while True:
# 读取一个转换结果,这是一个介于0到4095之间的整数
val = adc.read()
print(val)
time.sleep(0.1) # 等待一段时间再进行下一次读取
```
在这段代码中,`atten()`函数用于设置ADC的衰减,以匹配输入信号的电压范围。`read()`函数负责读取一个转换结果。
### 4.1.2 数字信号输出
数字模拟转换器(DAC)是将数字信号转换为模拟信号的设备。STM32F407微控制器内置了一个12位双通道DAC,可以为各种应用提供模拟输出。DAC的用途广泛,例如控制电机速度、调节LED亮度或模拟各种传感器信号。
在MicroPython中操作DAC进行数字信号输出的基本步骤如下:
1. 导入必要的模块。
2. 创建DAC对象。
3. 设置输出值。
下面是一段示例代码,演示了如何使用STM32F407的DAC输出一个稳定的模拟电压信号:
```python
from machine import DAC
import time
# 创建DAC对象,并指定使用通道1
dac = DAC(1)
# 设置DAC的输出电压范围为0到3.3V
dac.write(2048) # 将输出设置为中间值,即3.3V / 2
while True:
# 可以改变写入的值,以调整输出电压
dac.write(1024) # 设置输出电压大约为1.65V
time.sleep(1)
dac.write(3072) # 设置输出电压大约为2.48V
time.sleep(1)
```
在这段代码中,`write()`函数将值写入DAC,以输出对应的模拟电压。DAC的分辨率为12位,所以其有效值范围是0到4095。在这里,我们用中间值2048输出约3.3V/2的电压。通过改变`write()`函数中的值,我们可以轻松调整输出电压。
## 4.2 传感器和无线通信
### 4.2.1 常见传感器的数据读取
STM32F407微控制器与各种传感器的配合使用,可以收集并处理来自真实世界的数据。例如,可以读取温度传感器、湿度传感器、光传感器、压力传感器等的数据。
以读取一个常见的温度传感器为例,比如LM35温度传感器,它输出一个与温度成线性关系的模拟电压信号。下面是读取LM35传感器数据的代码示例:
```python
from machine import ADC
import time
# 创建ADC对象,并指定连接LM35的通道
adc = ADC(Pin(0))
# 设置ADC为12位分辨率
adc.atten(ADC.ATTN_11DB)
# 读取传感器的函数
def read_temperature():
val = adc.read() # 读取模拟值
# LM35每摄氏度的输出为10mV
temp = val * (3.3 / 4096) * 100 # 将ADC值转换为温度值
return temp
while True:
temp = read_temperature()
print("Temperature: {:.2f} C".format(temp))
time.sleep(1)
```
在这个示例中,我们定义了一个函数`read_temperature()`来读取并转换LM35传感器的模拟输出为摄氏温度值。
### 4.2.2 蓝牙和Wi-Fi模块的集成
除了处理传感器数据,微控制器还可以与蓝牙和Wi-Fi模块等无线通信模块集成,以实现数据的远程传输和控制。
这里以蓝牙模块为例,展示如何在MicroPython中使用蓝牙模块进行串口通信。首先,需要将蓝牙模块与STM32F407微控制器的串口连接。接下来,可以通过以下代码进行蓝牙串口通信:
```python
from machine import UART
import time
# 创建UART对象,连接到蓝牙模块
uart = UART(1, baudrate=9600)
def send_data(data):
uart.write(data) # 发送数据到蓝牙模块
def receive_data():
# 检查数据是否可读,并读取最多128字节
if uart.any():
return uart.read(128)
return None
while True:
# 发送数据到蓝牙模块
send_data("Hello Bluetooth!\r\n")
# 等待一段时间,让蓝牙模块处理数据
time.sleep(2)
# 从蓝牙模块读取数据
data = receive_data()
if data:
print("Received:", data)
```
在这段代码中,我们使用`UART`对象来配置和使用蓝牙模块。`send_data()`函数用于发送数据,而`receive_data()`函数检查并读取来自蓝牙模块的数据。
## 4.3 显示和人机交互
### 4.3.1 OLED/LCD显示技术
为用户提供视觉反馈是嵌入式系统中常见的需求。OLED和LCD显示器是两种常用的显示技术,它们可以显示文本、图形或图像。
假设我们使用的是一个I2C接口的OLED显示模块,以下是如何使用MicroPython与该模块通信的示例代码:
```python
from machine import I2C, Pin
from ssd1306 import SSD1306_I2C
# 创建I2C对象和SSD1306 OLED显示对象
i2c = I2C(0, scl=Pin(22), sda=Pin(21))
oled = SSD1306_I2C(128, 64, i2c)
def show_message(message):
oled.fill(0) # 清除显示
oled.text(message, 0, 0) # 在显示上打印消息
oled.show() # 刷新显示内容
while True:
show_message("Hello, Display!")
time.sleep(2)
```
在这段代码中,我们首先创建了一个`I2C`对象来与OLED模块通信,然后创建了一个`SSD1306_I2C`对象来控制OLED显示。`show_message()`函数用于在OLED上显示文本消息。
### 4.3.2 触摸屏和按键输入处理
除了显示设备,人机交互还包括输入设备,如触摸屏和物理按钮。STM32F407可以连接这些输入设备,并通过MicroPython进行编程以响应用户的交互。
在本节中,我们将不提供具体的代码示例,因为实现触摸屏或按键输入处理的代码会依赖于所使用的具体硬件模块的特性。通常,您需要阅读模块的数据手册来了解如何正确地初始化和读取这些设备的状态,并且在MicroPython中编写相应的驱动代码。
不过,可以总结的是,实现输入设备通常涉及到以下步骤:
- 初始化输入设备。
- 在主循环中或通过中断来读取输入设备的状态。
- 解析状态,并执行相应的逻辑或函数调用。
此外,实现用户输入时,合理地管理状态和事件是关键,这包括防抖动处理、长按检测和输入缓冲等,以确保系统对用户操作的正确响应。
```mermaid
graph LR
A[初始化输入设备] --> B[读取输入状态]
B --> C[解析状态]
C --> D[执行逻辑处理]
```
以上流程图展示了输入设备的一般处理流程,从初始化到最终执行与用户交互相关的逻辑。
# 5. STM32F407高级应用开发
## 5.1 实时操作系统(RTOS)集成
### 5.1.1 RTOS基础和选择
实时操作系统(RTOS)是一种为实时应用设计的操作系统,它能够确保计算任务在确定的时间内完成。RTOS对于需要在严格时间限制下运行的应用至关重要,例如工业控制系统、嵌入式医疗设备、汽车电子等。它们可以提供多任务处理能力,包括任务切换、同步、通信和调度。
在选择RTOS时,需要考虑一些关键因素,如任务的优先级数量、内存使用、响应时间和调度策略。一些流行的选择包括FreeRTOS、uC/OS-II和RT-Thread。每个RTOS都有其特点和优势,选择时需要根据项目需求和硬件资源进行权衡。
一个典型的RTOS具备以下特性:
- **多任务处理:** 允许同时运行多个任务。
- **任务调度:** 决定哪个任务执行和在何时执行。
- **同步机制:** 确保任务间正确地共享资源。
- **通信机制:** 任务间传递消息和数据。
- **中断管理:** 处理外部和内部中断。
接下来的章节将深入探讨任务管理和线程同步机制。
### 5.1.2 任务管理与线程同步
在RTOS中,任务管理是确保软件稳定运行的核心。任务可以理解为轻量级的线程,它们在操作系统中被调度和执行。每个任务通常包含一个入口函数、参数、优先级和堆栈空间。
#### 创建任务
在FreeRTOS中创建任务的代码示例如下:
```c
void Task1(void *pvParameters)
{
for(;;) // 无限循环
{
// 任务代码
}
}
int main(void)
{
// 硬件初始化代码
// ...
// 创建任务
xTaskCreate(
Task1, // 任务函数
"Task 1", // 任务名称
128, // 任务堆栈大小
NULL, // 传递给任务函数的参数
1, // 任务优先级
NULL ); // 任务句柄
// 启动调度器
vTaskStartScheduler();
// 如果返回,则说明没有足够的RAM来创建任务
for(;;);
}
```
#### 线程同步
在多任务环境中,线程同步机制是防止数据竞争和死锁的关键。常见的同步机制包括互斥锁(Mutexes)、信号量(Semaphores)和事件组(Event Groups)。
**互斥锁(Mutexes)**
互斥锁用于保护共享资源,防止多个任务同时访问导致数据不一致。使用互斥锁时需要注意避免优先级倒置问题。
```c
void TaskWithMutex(void *pvParameters)
{
// 获取互斥锁
if(xSemaphoreTake(mutualExclusionLock, portMAX_DELAY) == pdTRUE)
{
// 临界区代码
// ...
// 释放互斥锁
xSemaphoreGive(mutualExclusionLock);
}
}
```
**信号量(Semaphores)**
信号量用于实现任务之间的同步,它可以被用来实现任务间的等待/通知机制。
```c
void TaskThatWaitsForSignal(void *pvParameters)
{
// 等待信号量
if(xSemaphoreTake(signalSemaphore, portMAX_DELAY) == pdTRUE)
{
// 现在信号量已获得,可以继续执行
// ...
}
}
void TaskThatSendsSignal(void *pvParameters)
{
// 执行其他任务代码
// ...
// 发送信号量
xSemaphoreGive(signalSemaphore);
}
```
通过上述示例代码,我们可以看到任务创建和同步是实时系统中非常重要的部分。正确地使用任务管理和同步机制可以显著提高系统的响应性和可靠性。
## 5.2 高级网络功能
### 5.2.1 以太网接口编程
以太网作为最广泛的局域网技术,提供了标准化的通信接口。在STM32F407上,实现以太网通信通常需要使用硬件以太网接口或通过网络模块。
STM32F407使用以太网MAC(媒体访问控制器)通过RMII(Reduced Media Independent Interface)或MII(Media Independent Interface)接口与物理层(PHY)芯片进行通信。
#### 以太网MAC初始化
以下是初始化MAC的代码片段,使用了HAL库函数进行以太网MAC初始化:
```c
/* 确保STM32CubeMX生成的HAL代码在此前已经被导入 */
/* 初始化以太网 */
void MX_Ethernet_Init(void)
{
heth.Instance = ETH;
heth.Init MediaType = RMII;
heth.Init.RxDesc = NULL;
heth.Init.TxDesc = NULL;
heth.Init.MACAddr = eth_macaddress;
heth.Init.RxBufferSize = 1524;
heth.Init.TxThreshold = ETH_TX招标位;
heth.Init.RxThreshold = ETH_RX招标位;
heth.Init背压 = ETH_BACK PRESSURE_7_8;
heth.Init.dropout = ETH.Dropout_1_2;
heth.Init.InterFrameGap = ETH_INTER FRAME GAP_9_6;
heth.Init.OkToBoot = true;
heth.Init驼背 = false;
heth.Init.CRCStrip = false;
heth.Init.ChecksumOffload = false;
heth.Init.WakeUpMode = HAL_eth_WakeUp_Poll;
heth.Init.AutoNegotiation = ETH_AUTO_negotiation_100M;
heth.Init.Speed = ETH_SPEED_100M;
heth.Init.DuplexMode = ETH_DUPLEX_MODE_FULLDUPLEX;
heth.Init.PhyAddress = RMII ETH Phy 地址;
if(HAL_eth_Init(&heth) != HAL_OK)
{
/* 初始化失败处理 */
}
}
```
#### 以太网通信
一旦MAC初始化完成,就可以通过socket API进行网络通信。
```c
struct sockaddr_in server_address;
int sock = socket(AF_INET, SOCK_STREAM, 0);
server_address.sin_family = AF_INET;
server_address.sin_port = htons(80); // HTTP端口
inet_pton(AF_INET, "192.168.0.100", &server_address.sin_addr); // 服务器地址
connect(sock, (struct sockaddr *)&server_address, sizeof(server_address));
send(sock, "GET /index.html HTTP/1.1\r\n\r\n", 21, 0);
char buf[1024];
int size = recv(sock, buf, sizeof(buf), 0);
```
以上代码展示了如何使用TCP协议发送HTTP请求并接收响应数据。
### 5.2.2 高级通信协议实现
在嵌入式系统中实现高级通信协议,如MQTT(消息队列遥测传输)协议,可以使得设备能够以轻量级的方式参与物联网(IoT)应用。MQTT是基于发布/订阅模型的轻量级消息协议,它允许设备发布消息到服务器(称为Broker),也可以订阅其他设备发布的话题来接收消息。
#### MQTT协议实现
实现MQTT协议可以使用多种开源库,例如Eclipse Paho。以下是如何使用Paho客户端库创建MQTT连接的示例:
```c
#include "MQTTClient.h"
#define ADDRESS "tcp://broker.hivemq.com:1883"
#define CLIENTID "STM32F407Client"
#define TOPIC "test/topic"
#define PAYLOAD "Hello World!"
#define PAYLOADLEN strlen(PAYLOAD)
MQTTClient client;
void connlost(void *context, char *cause)
{
printf("\nConnection lost\n");
printf(" причиной: %s\n", cause);
}
void messageArrived(void *context, char *topicName, int topicLen, MQTTClient_message *message)
{
printf("Topic %s\n", topicName);
printf("Message %s\n", message->payload);
MQTTClient_freeMessage(&message);
MQTTClient_free(topicName);
}
void delivered(void *context, MQTTClient_deliveryToken dt)
{
printf("Message with token value %d delivery confirmed\n", dt);
}
int main(int argc, char* argv[])
{
MQTTClient_connectOptions conn_opts = MQTTClient_connectOptions_initializer;
int rc;
MQTTClient_create(&client, ADDRESS, CLIENTID,
MQTTCLIENT_PERSISTENCE_NONE, NULL);
conn_opts.keepAliveInterval = 20;
conn_opts.cleansession = 1;
conn_opts.on_message_arrived = messageArrived;
conn_opts.on_connect = connlost;
conn_opts.on_success = delivered;
if ((rc = MQTTClient_connect(client, &conn_opts)) != MQTTCLIENT_SUCCESS)
{
printf("Failed to connect, return code %d\n", rc);
exit(EXIT_FAILURE);
}
MQTTClient_message pubmsg = MQTTClient_message_initializer;
pubmsg.payload = PAYLOAD;
pubmsg.payloadlen = PAYLOADLEN;
MQTTClient_deliveryToken token;
MQTTClient_publishMessage(client, TOPIC, &pubmsg, &token);
printf("Waiting for up to 15 seconds for publication of %s\n"
"on topic %s for client with ClientID: %s\n", PAYLOAD, TOPIC, CLIENTID);
rc = MQTTClient_waitForCompletion(client, token, 15000);
printf("Message with delivery token %d delivered\n", token);
MQTTClient_disconnect(client, 10000);
MQTTClient_destroy(&client);
}
```
该示例展示了如何创建一个MQTT客户端,订阅一个话题,并发布消息。通过这种方式,STM32F407可以轻松地与云服务和其他设备进行数据交换。
## 5.3 安全性和加密技术
### 5.3.1 基本加密算法介绍
在嵌入式设备中,数据安全和加密技术至关重要。这不仅可以防止未授权访问,还可以确保数据在传输过程中的完整性。
STM32F407具有硬件加密加速器,它支持AES、DES和SHA算法。使用这些硬件加速器可以提高数据加密和验证的速度,降低CPU负担。
#### AES加密
高级加密标准(AES)是一种广泛使用的对称加密算法,它可以保证数据的安全。在STM32F407上使用AES加密涉及设置加密模式、密钥、初始化向量(IV)和密文。
```c
/* 仅为代码示例 */
/* 需要包含STM32F4xx HAL头文件 */
#include "stm32f4xx_hal.h"
/* AES上下文结构 */
AES_HandleTypeDef AesHandle;
void AES_Init(void)
{
/* AES初始化代码 */
/* 设置加密模式和密钥 */
}
void AES_Encrypt(uint8_t *src, uint8_t *dst, uint16_t size)
{
/* 使用硬件加密加速器执行加密 */
HAL_AES_Encrypt(&AesHandle, src, dst, size);
}
```
#### SHA-256哈希
SHA-256是SHA-2算法家族中的一员,它是一个安全的哈希算法,常用于数据完整性验证。
```c
/* 仅为代码示例 */
/* 需要包含STM32F4xx HAL头文件 */
#include "stm32f4xx_hal.h"
/* SHA-256上下文结构 */
SHA256_HandleTypeDef Sha256Handle;
void SHA256_Init(void)
{
/* SHA-256初始化代码 */
}
void SHA256_Update(uint8_t *src, uint16_t size)
{
/* 更新哈希值 */
HAL_SHA256_Update(&Sha256Handle, src, size);
}
void SHA256_Finalize(uint8_t hash[32])
{
/* 获取最终的哈希值 */
HAL_SHA256_Finalize(&Sha256Handle, hash);
}
```
### 5.3.2 数据安全与加密实例
为了实现数据加密和安全,可以考虑以下几个步骤:
1. **加密存储** - 在存储介质上加密敏感数据,保护固件更新。
2. **安全启动** - 确保设备启动过程中的代码和数据安全。
3. **安全通信** - 使用TLS/SSL协议在设备和服务器之间建立安全通道。
4. **固件签名** - 使用数字签名验证固件的完整性和源。
在实际应用中,STM32F407可以与W5500以太网模块结合,实现完整的TLS/SSL协议。结合之前的以太网通信代码,设备可以通过SSL/TLS安全地发送和接收数据。
在实现以上安全特性时,开发者需要考虑到性能影响,尤其是对于资源受限的嵌入式设备。然而,由于STM32F407带有硬件加密加速器,可以在保持高性能的同时,也实现加密与安全需求。
# 6. 项目实战与案例分析
## 6.1 实战项目概览与需求分析
### 6.1.1 项目目标和预期效果
在本章节中,我们将深入探讨一个具体的实战项目案例,这个项目以STM32F407为核心的智能环境监测系统。项目的主要目标是通过STM32F407的强大处理能力和MicroPython的高效编程,实现一个多传感器数据采集、处理和展示的解决方案。
预期效果如下:
- 实时监测环境中的温度、湿度、光照强度等多个参数。
- 通过LCD屏幕或远程服务器展示实时数据。
- 支持本地存储,可记录历史数据供分析使用。
- 可扩展蓝牙或Wi-Fi模块,实现数据的远程无线传输。
### 6.1.2 系统设计和模块划分
为了达到上述目标,我们将系统划分为以下模块:
- **传感器模块**:负责数据的采集工作,包括温湿度传感器、光照传感器等。
- **数据处理模块**:使用STM32F407进行数据的初步处理和分析。
- **人机交互模块**:通过LCD/OLED显示设备展示数据,并通过按键或触摸屏进行用户交互。
- **通信模块**:集成蓝牙和Wi-Fi模块,用于数据的远程传输。
## 6.2 编码实现与调试
### 6.2.1 关键代码片段和功能实现
在这个阶段,我们将通过代码块来展示如何使用MicroPython进行项目编程。以下为一个简单的示例,用于读取DHT11温湿度传感器的数据并打印:
```python
from machine import Pin, Timer
import dht
# 设置DHT11传感器的GPIO引脚
sensor_pin = Pin(4, Pin.OUT)
sensor = dht.DHT11(sensor_pin)
def read_sensor(timer):
try:
sensor.measure()
print('Temperature: {} C'.format(sensor.temperature()))
print('Humidity: {} %'.format(sensor.humidity()))
except Exception as e:
print('Failed to read from sensor:', str(e))
# 设置定时器,定期读取传感器数据
sensor_timer = Timer(0)
sensor_timer.init(period=5000, mode=Timer.PERIODIC, callback=read_sensor)
```
### 6.2.2 调试过程与问题解决
在调试过程中,我们可能会遇到各种问题,比如传感器数据读取失败、通信不畅等。遇到此类问题时,我们需要按照以下步骤进行排查:
1. 检查硬件连接是否正确。
2. 验证传感器模块是否正确配置。
3. 使用MicroPython的串口打印调试信息,检查数据流。
4. 更新固件和库文件,确保兼容性和最新功能。
## 6.3 项目评估与优化建议
### 6.3.1 性能评估和用户体验
项目完成后,需要对整个系统的性能进行评估,包括系统的稳定性和响应速度。用户体验也是评估的重要方面,如数据显示是否直观、交互是否友好等。
### 6.3.2 代码优化与扩展升级
优化方面可以从以下几个维度进行:
- **性能优化**:分析代码瓶颈,使用更高效的算法或数据结构。
- **资源优化**:精简代码和资源使用,减少内存和存储占用。
- **可扩展性优化**:设计模块化的代码结构,便于未来添加新的功能或硬件。
### 预备实践
实际操作中,可以采取以下措施:
- **代码审查**:定期进行代码审查,保证代码质量。
- **自动化测试**:编写自动化测试脚本,快速发现问题。
- **用户反馈**:收集用户反馈,针对用户需求进行定制化优化。
至此,我们通过项目的案例分析,一步步深入理解了从项目规划到实施、再到后期优化的完整过程。在实际开发中,以上步骤将是一个循环迭代的过程,通过不断的测试和改进,最终实现一个既稳定又高效的智能环境监测系统。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 MicroPython 在 STM32F407 板上的移植过程,从硬件兼容性到软件环境搭建,提供了一步到位的移植教程。此外,还介绍了 MicroPython 在 STM32F407 上的外设驱动开发、实时操作系统集成、低功耗编程技巧、接口对接和高级应用。专栏还提供了资源管理攻略,帮助开发者高效使用 MicroPython 管理硬件资源。最后,通过案例分析和性能测试,评估了 MicroPython 在 STM32F407 上的兼容性、性能和安全性,为嵌入式开发者提供了全面深入的 MicroPython 移植指南。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Qt环境搭建终极指南】:5分钟内解决Qt Creator版本检测噩梦
参考资源链接:[解决qt-creator创建工程说“没有有效的qt版本问题”](https://wenku.csdn.net/doc/6412b6f3be7fbd1778d48903?spm=1055.2635.3001.10343)
# 1. Qt环境搭建快速入门
## 开启Qt旅程:基础搭建
在开始我们的Qt编程之旅前,了解并安装一个适合的开发环境是必要的。本章会引导你通过几个简单的步骤快速搭建起Qt的
网络数据分析:综合实验中的数据驱动方法:数据分析师必备技能

参考资源链接:[通达学院:网络前沿SSH实验——远程管理路由器](https://wenku.csdn.net/doc/1w5jjs3s54?spm=1055.2635.3001.10343)
# 1. 网络数据分析概述
## 1.1 网络数据分析的重要性
在当今这个数据爆炸的时代,网络数据分析不仅对企业的市场战略和运营决策起到了关键作用,而且对网络安全和流量管理等领域也有着不可替代的重要性。有效的网络数据分析可以帮助企业发现潜在的市场
【高效优化】ST-FOC4.2电机控制:中文社区分享的调整秘诀

参考资源链接:[STM32PMSM FOC SDK V4.2全中文详解:高性能电机驱动与API应用](https
【FreeRTOS监控与可视化】:Tracealyzer实时数据监控技巧
参考资源链接:[Tracealyzer配置指南:FreeRTOS实时分析与调试](https://wenku.csdn.net/doc/6412b547be7fbd1778d4293d?spm=1055.2635.3001.10343)
# 1. FreeRTOS监控与可视化的基础概念
在现代嵌入式系统的开发与维
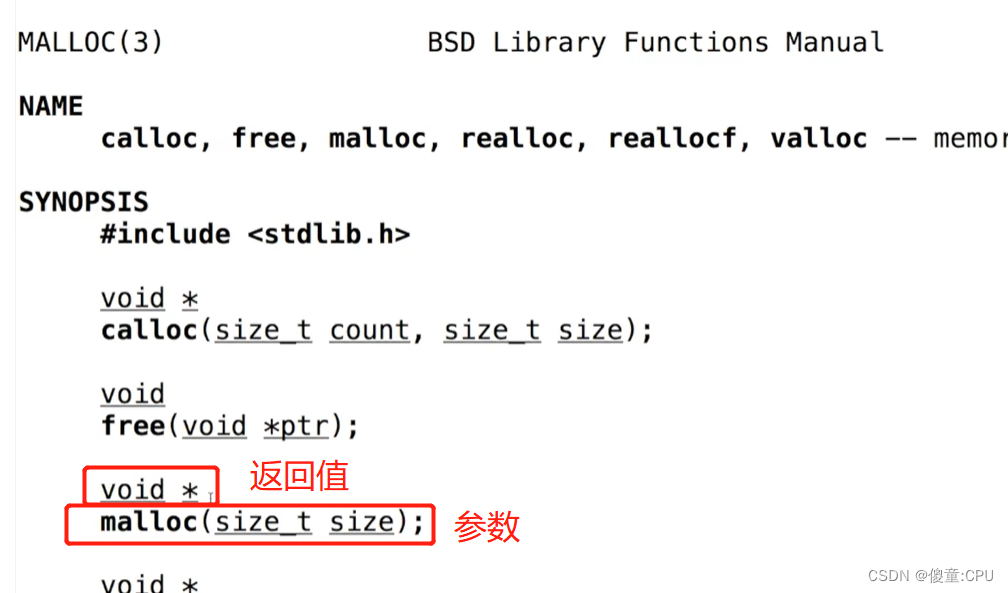
C语言内存分配全解析:malloc、calloc、realloc和free的精准用法
参考资源链接:[C语言入门资源:清晰PDF版,亲测可用](https://wenku.csdn.net/doc/6412b6d0be7fbd1778d48122?spm=1055.2635.3001.10343)
# 1. C语言内存管理基础
在计算机科学中,内存管理是软件开发的核心组成部分之一,特别是在系统编程语言如C语言中。正确理解并有效管理内存是编写高效、稳定且安
【动态规划速成课】:从算法导论到实战,一步到位
参考资源链接:[《算法导论》中文版各章习题答案汇总](https://wenku.csdn.net/doc/3rfigz4s5s?spm=1055.2635.3001.10343)
# 1. 动态规划的核心概念和算法原理
动态规划是计算机科学中一种解决问题的方法论,特别是在优化问题和决策过程中非常有用。动态规划的核心在于将一个复杂问题分解为更小的子问题,并通过解决子问题来构
VBS与IE的协同工作:自动化测试与网页导航的终极结合!

参考资源链接:[VBScript中开启IE的两种方法:Application与WScript.Shell示例](https://wenku.csdn.net/doc/64533e54ea0840391e778de9?spm=1055.2635.3001.10343)
# 1. VBS与IE协同工作简介
在当前的软件开发和测试环境中,自动化测试已成为提高效率和质量的关
HTML学习宝典:利用MDN从入门到精通
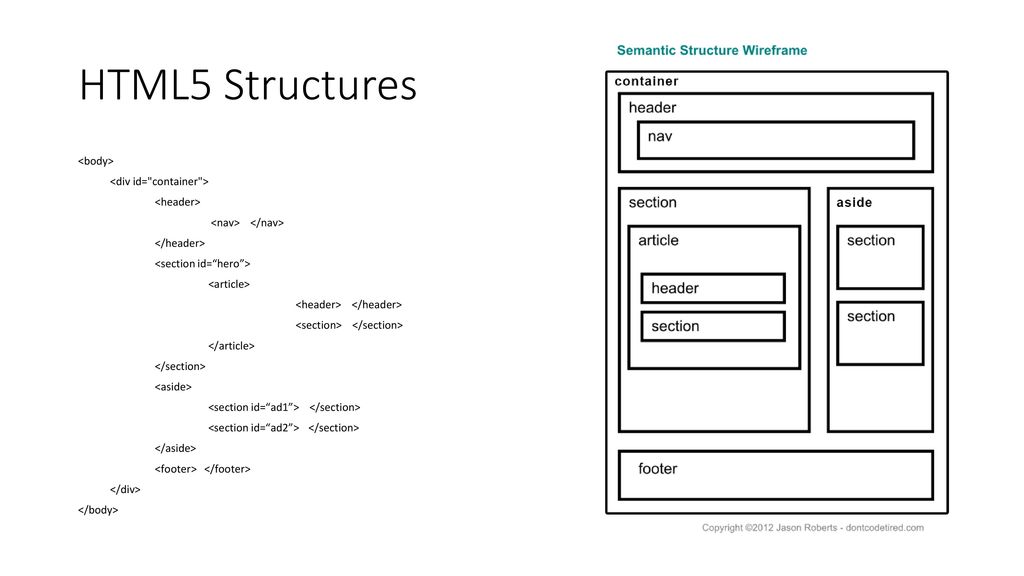
参考资源链接:[MDN离线文档:中文API镜像及注意事项](https://wenku.csdn.net/doc/68x0ofhfub?spm=1055.2635.3001.10343)
# 1. HTML基础与结构
HTML(HyperText Markup Language)是构建网页的基础。任何网站都离不开HTML,它通过使用各种标记(tags)来定义网页上的内容和结构。本章将介绍HTML的基
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )