GrblController高效通信秘诀:同步与通信的最佳实践
发布时间: 2024-12-03 22:13:30 阅读量: 7 订阅数: 11 
参考资源链接:[GrblController安装与使用教程](https://wenku.csdn.net/doc/6412b792be7fbd1778d4ac76?spm=1055.2635.3001.10343)
# 1. GrblController基础介绍与同步原理
GrblController是一个开源的固件,主要用于微控制器上,通过G代码指令控制步进电机。在CNC机床加工中,它的存在极大地方便了用户对机床的控制,特别是对于DIY爱好者和小型工作坊来说,它是一个不可或缺的工具。了解GrblController的基础功能和它实现同步操作的原理,是深入掌握并有效应用它的前提。
## 1.1 GrblController核心功能概述
GrblController的核心功能包括但不限于:运动控制(如线性、圆弧插补)、速度规划、加减速管理以及行程限制。这些功能共同构建了GrblController高效可靠的运动控制环境,为CNC机器的精确操作提供了可能。
## 1.2 GrblController的同步原理
同步原理指的是GrblController如何确保G代码指令被有序且准确地执行。它依赖于一个事件循环和一个精确的步进时钟来驱动电机和解释G代码,保证同步执行。理解这一原理对于排查问题和优化性能至关重要。
## 1.3 同步与异步操作的区别
在GrblController中,同步操作指的是按照G代码指令顺序依次执行,而异步操作通常涉及到实时响应外部事件或中断。同步操作因其预测性和简单性在GrblController中占主导地位,但了解异步操作在某些特定场景下的应用也是必要的。
## 1.4 本章小结
本章介绍了GrblController的核心功能和它如何利用同步原理来控制CNC机器。为了深入理解GrblController,下一章将详细探讨其通信机制,从理论基础到实践中遇到的挑战,并介绍相应的解决策略。
# 2. GrblController通信机制深度解析
### 2.1 GrblController同步通信的理论基础
同步通信作为数据传输的基本方式之一,允许数据在通信双方之间以预先定义的顺序进行交换,从而保证了数据的完整性和顺序性。在GrblController中,同步通信是确保CNC机床与控制器之间指令准确无误地传输的关键。
#### 2.1.1 同步通信的基本概念和重要性
同步通信意味着发送方在发送数据之前,需等待接收方的接收就绪信号。这种方式在保证数据同步的同时,也带来了较大的时间开销,因为通信双方需要不断进行握手确认。GrblController在CNC机床控制中运用同步通信来确保每一条G代码指令都能够在准确的时刻被机床执行,从而获得精确的加工结果。
#### 2.1.2 Grbl协议与G代码解析
Grbl协议是基于G代码的通信协议,它规定了CNC机床如何解析和执行由GrblController发送的指令。G代码是一系列的指令和代码,用来控制CNC机床的运动和操作。为了深入理解Grbl协议,我们需要首先了解G代码的基本结构,包括预备功能(G代码)、辅助功能(M代码)等,它们决定了机床的具体行为。
### 2.2 GrblController的通信协议细节
#### 2.2.1 通信协议层次结构
通信协议通常具有一定的层次结构,GrblController的通信协议分为物理层、数据链路层和应用层。物理层负责数据的物理传输,例如RS-232或USB接口;数据链路层确保数据包在物理介质上可靠传输;应用层则处理与用户直接相关的通信逻辑,如G代码的发送与接收。
#### 2.2.2 数据包的构建与解析流程
数据包的构建从将G代码转换为Grbl协议定义的数据格式开始,然后将数据封装到数据包中。GrblController在接收到数据包后,按照Grbl协议规则进行解析。这里的关键是解析函数的实现,它按照协议规定,将数据包中的信息转换为机床能够理解和执行的控制信号。
```c
// 伪代码示例
function parseDataPacket(dataPacket) {
// 检查数据包的正确性
if(!isValid(dataPacket)) {
return ERROR;
}
// 提取指令
GCodeInstruction instruction = extractGCode(dataPacket);
// 执行指令
executeGCode(instruction);
return SUCCESS;
}
```
#### 2.2.3 错误检测与重传机制
在通信过程中,错误检测和重传机制是保障数据完整性的关键组成部分。GrblController通过校验和(Checksum)和超时重传等方法来实现这一功能。当接收方检测到数据包损坏或丢失时,会通过控制信号告知发送方重发数据包。
### 2.3 同步通信的实践挑战与解决方案
#### 2.3.1 延迟和丢包问题
在实时控制系统中,延迟和丢包是常见的问题。GrblController通过实时监控通信状态,并在发现异常时及时重发数据包来缓解这一问题。同时,合理调整通信参数,如超时时间,也是保证系统稳定性的有效措施。
#### 2.3.2 实时性与性能优化策略
为了提升GrblController的实时性和性能,可以采用以下几种策略:
- 使用更高速的通信接口,如USB 3.0。
- 在GrblController中实现多线程,以提高数据处理的效率。
- 对数据包进行压缩,减少传输时间。
通过实践,我们可以观察到GrblController在稳定运行下的通信效率和系统响应时间,进而调整策略,以达到最优性能。
本章节我们深入了解了GrblController同步通信的理论基础、通信协议细节,以及面对实践挑战时的解决方案。接下来的章节将会探讨GrblController在CNC机床中的应用实践,以及如何通过各种方法提升通信性能。
# 3. GrblController在CNC机床中的应用实践
## 3.1 CNC机床通信接口的实现
在现代制造业中,CNC(Computer Numerical Control)机床是不可或缺的精密设备。GrblController作为一个先进的控制器,它在CNC机床中的应用提供了强大的通信能力。为了充分利用GrblController的优势,正确实现CNC机床的通信接口至关重要。
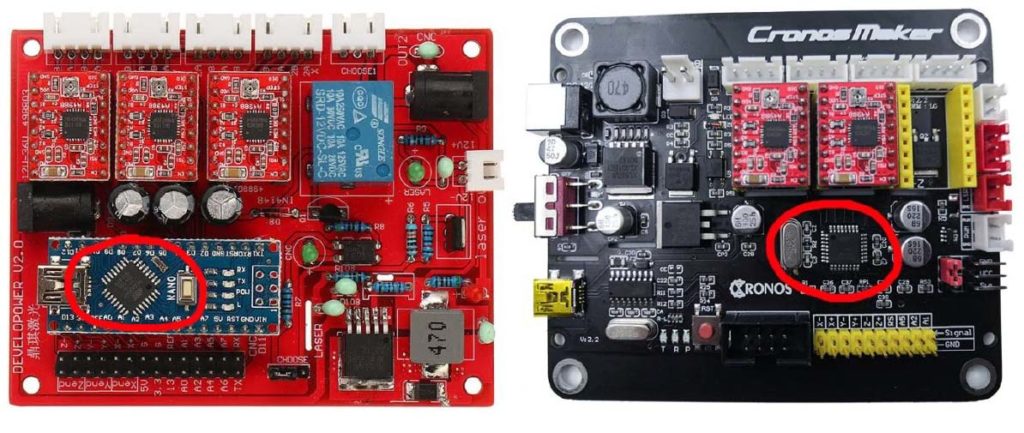
### 3.1.1 CNC机床与GrblController的硬件连接
硬件连接是实现通信的第一步。要将CNC机床与GrblController正确连接,需要注意以下几点:
- **电源连接**:确保GrblController与CNC机床的电源相匹配,并且电压、电流符合设备规格。
- **信号线连接**:GrblController接收来自计算机或其他设备的G代码指令,并通过步进驱动器接口控制CNC机床的电机。
- **参考点设定**:通过Grbl的G代码指令,精确设定CNC机床的参考点,这对于加工精度至关重要。
- **限位开关设置**:设置适当的限位开关,以防CNC机床在运动过程中发生碰撞。
下面是一个示例代码块,展示了如何配置GrblController的基本参数:
```c
// 设置Grbl的步进电机参数
$100=250.000 (X步进/微步)
$101=250.000 (Y步进/微步)
$102=250.000 (Z步进/微步)
// 设置限位开关的状态
$30=1 (X轴限位开关有效)
// 启用Grbl的软限位功能
$21=1 (软限位启用)
```
### 3.1.2 CNC机床状态监控与控制
CNC机床的状态监控对于保证加工质量与安全至关重要。GrblController提供了丰

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**GrblController 专栏简介**
GrblController 专栏是数控系统安装、使用和优化方面的权威指南。它涵盖了从初学者到高级用户的各个方面,提供了全面的教程、秘诀和故障排除解决方案。专栏深入探讨了 GrblController 的架构和工作原理,并提供了关键参数调优指南,以提升性能。此外,它还介绍了自动化脚本编写、高效通信和实时监控技巧,以提高效率和精确度。专栏还提供了打造自动化数控环境和在教育应用中使用 GrblController 的指南,使其成为所有数控爱好者和专业人士的宝贵资源。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
PCAN-Explorer 5故障诊断大师:深入理解诊断功能与解决之道(实用、专业、急迫性)
参考资源链接:[PCAN-Explorer5全面指南:硬件连接、DBC操作与高级功能](https://wenku.csdn.net/doc/4af937hfmn?spm=1055.2635.3001.10343)
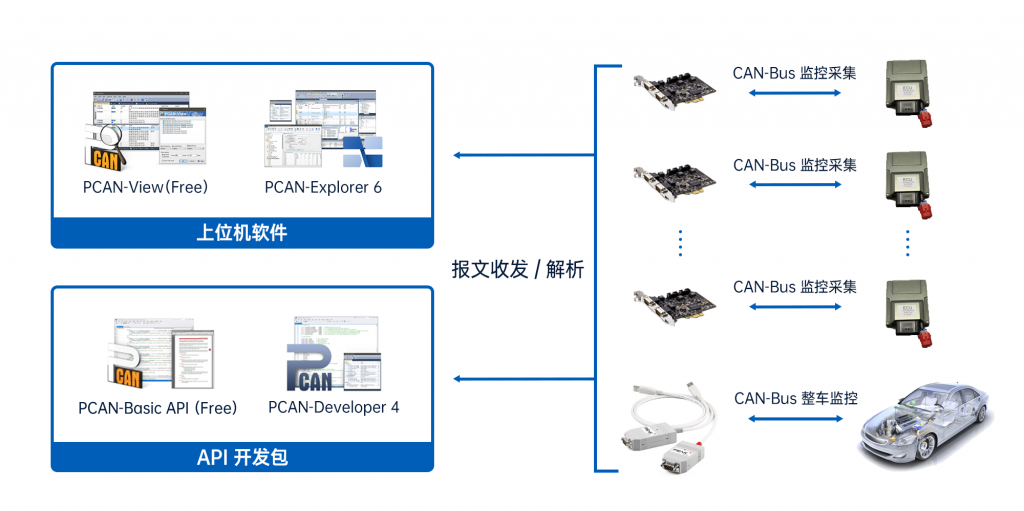
# 1. PCAN-Explorer 5概述
## 1.1 简介
PCAN-Explor
三菱PLC-QJ71MB91互操作性指南:与其他控制器无缝集成的实现方法
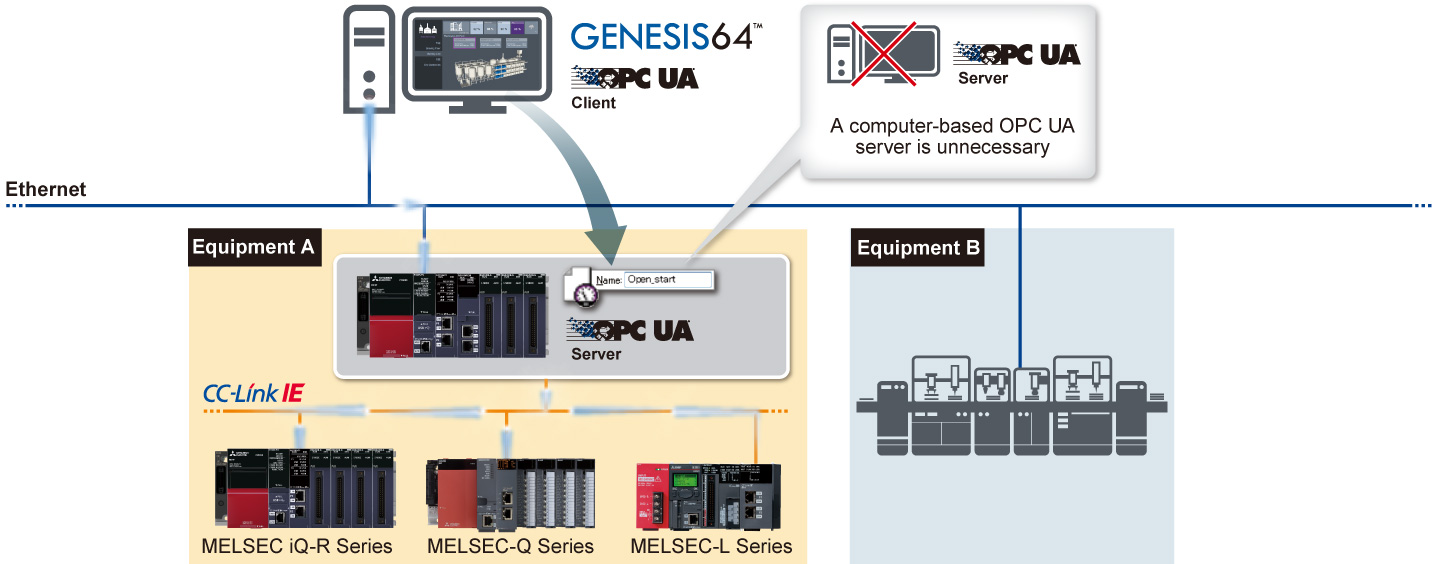
参考资源链接:[三菱PLC QJ71MB91 MODBUS接口手册:安全操作与配置指南](https://wenku.csdn.net/doc/6412b6edbe7fbd1778d4879d?spm=1055.2635.3001.10343)
# 1. 三菱PLC-QJ71MB91互操作性概述
## 1.1 三菱PLC-
线性代数矩阵理论:关键性分析与应用
参考资源链接:[《矩阵论》第三版课后答案详解](https://wenku.csdn.net/doc/ijji4ha34m?spm=1055.2635.3001.10343)
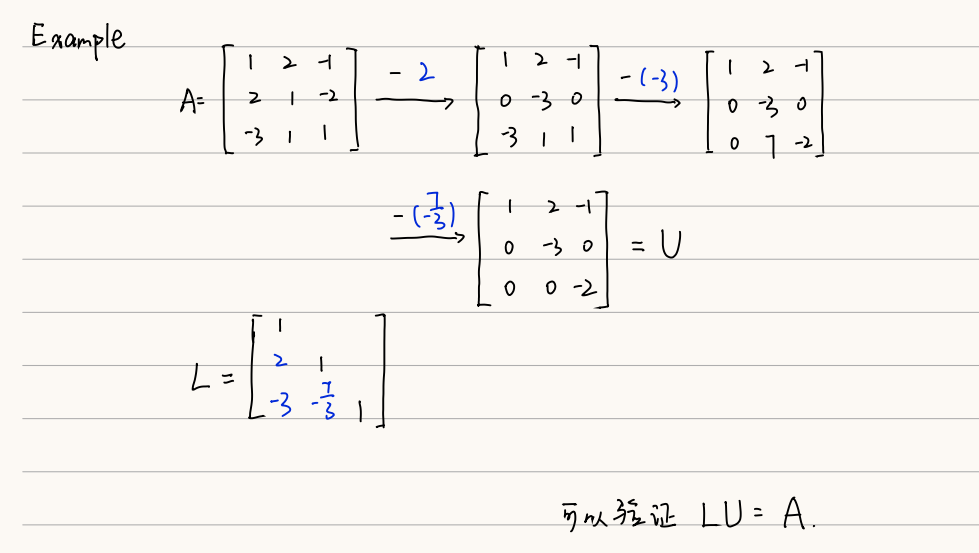
# 1. 线性代数矩阵理论基础
## 1.1 线性代数的重要性
在数学的多个分支中,线性代数因其在科学和工程领域的广泛应用而占据了核心地位。矩阵作为线性代数中的一种基本工具,是研究线性变换和解决线性方程组的有效手段。了解和掌握矩阵
统计推断的可视化方法
参考资源链接:[统计推断(Statistical Inference) 第二版 练习题 答案](https://wenku.csdn.net/doc/6412b77cbe7fbd1778d4a767?spm=1055.2635.3001.10343)
# 1. 统计推断与可视化的关系
## 1.1 统计推断与可视化的桥梁作用
统计推断与可视化是数据分析中密不可分的两个环节。统计推断通过数学方法从样本数
VRAY渲染器粒子系统:100个术语与效果实现,创造无限可能

参考资源链接:[VRAY渲染器关键参数中英文对照与详解](https://wenku.csdn.net/doc/2mem793wpe?spm=1055.2635.3001.10343)
# 1. VRAY渲染器粒子系统概述
本章将为您搭建一个理解VRAY渲染器中粒子系统的框架,让读者明白V
WS1850S LPCD固件更新维护手册:保持系统最佳状态,专业维护轻松搞定!

参考资源链接:[WS1850S LPCD低功耗卡检测手册:配置与操作详解](https://wenku.csdn.net/doc/644b82e0ea0840391e559897?spm=1055.2635.3001.10343)
# 1. WS1850S LPCD固件更新概述
在现代信息技术领域中,随着设备数量的不断增加和用户需求的日益增长,固件更新成为了确保设备运行效率和安全性的必要手段。本章节旨在为读者
GWR 4.0定制开发:根据需求个性化系统功能的5个步骤

参考资源链接:[GWR4.0地理加权回归模型初学者教程](https://wenku.csdn.net/doc/5v36p4syxf?spm=1055.2635.3001.10343)
# 1. GWR 4.0定制开发的概览与重要性
## 1.1 GWR 4.0的定义和定制开发需求
GWR 4.0是一种先进的软件解决方案,旨在为用户提供高度个性化和优化的服务。它允许企业
图像处理新技术前沿:IMX385LQR与人工智能的完美融合
参考资源链接:[Sony IMX385LQR:高端1080P星光级CMOS传感器详解](https://wenku.csdn.net/doc/6412b6d9be7fbd1778d48342?spm=1055.2635.3001.10343)
# 1. IMX385LQR传感器的革新特性
IMX385LQR传感器自问世以来,就以其创新性特性在图像捕捉领域引发关注。该传感器搭载了先进的堆栈式CMOS设计,这种结构可以极大地提升光信号的转换效率,进而增强在各种光照条件下的成像质量。此外,IMX385LQR具备高速数据读取能力,它的高速接口技术使其能够快速处理大量图像数据,这对于需要实时捕捉和分析
【并行测试的秘密武器】:马头拧紧枪缩短回归周期的并行测试策略
参考资源链接:[Desoutter CVI CONFIG用户手册:系统设置与拧紧工具配置指南](https://wenku.csdn.net/doc/2g1ivmr9zx?spm=1055.2635.3001.10343)
# 1. 并行测试的基本概念
## 1.1 并行测试的定义
并行测试(Parallel Testing),顾
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )