OpenCV边缘检测与图像分割:探索图像理解的新领域
发布时间: 2024-08-13 02:53:39 阅读量: 26 订阅数: 43 

opencv-基于c++实现的opencv图像处理算法之prewitt边缘检测.zip
# 1. OpenCV边缘检测的理论基础
边缘检测是计算机视觉中图像处理的重要技术,用于提取图像中物体的边界和轮廓。OpenCV(Open Source Computer Vision Library)是一个流行的计算机视觉库,提供了各种边缘检测算法。
边缘检测的目的是找到图像中像素亮度发生剧烈变化的位置,这些位置通常对应于物体的边界。OpenCV边缘检测算法基于不同的数学原理,如梯度、拉普拉斯算子等,来计算图像中像素的梯度或二阶导数,从而检测边缘。
# 2. OpenCV边缘检测算法实践
### 2.1 Canny边缘检测算法
#### 2.1.1 算法原理和步骤
Canny边缘检测算法是一种多阶段边缘检测算法,它通过以下步骤来检测图像中的边缘:
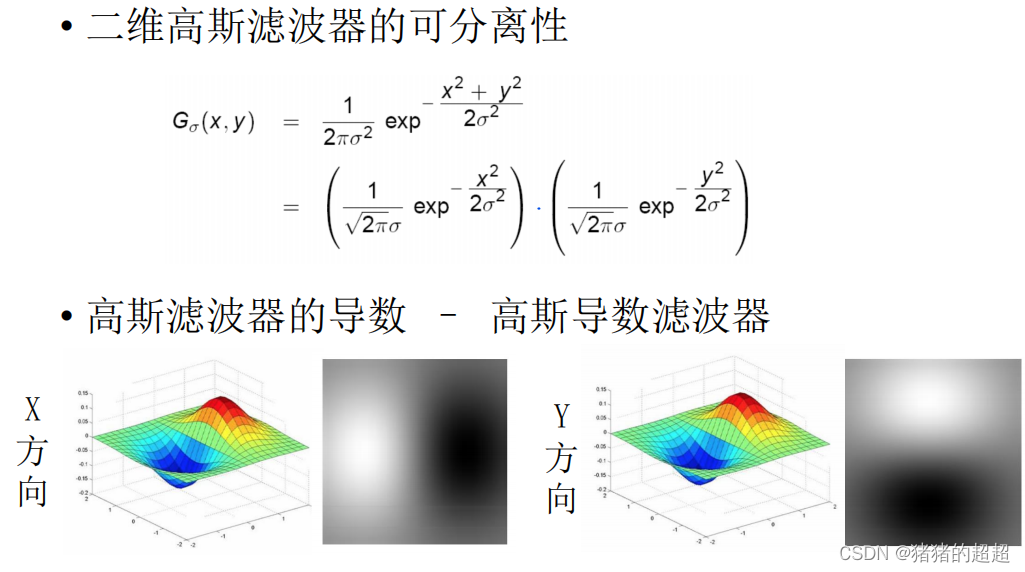
1. **高斯滤波:**使用高斯滤波器对图像进行平滑,以去除噪声。
2. **计算梯度:**使用Sobel算子或Prewitt算子计算图像中每个像素的梯度幅值和梯度方向。
3. **非极大值抑制:**沿着每个梯度方向,只保留梯度幅值最大的像素,以抑制非极大值。
4. **双阈值化:**使用两个阈值对梯度幅值进行阈值化。高于高阈值的像素被视为强边缘,低于低阈值的像素被视为非边缘。介于两者之间的像素被视为弱边缘。
5. **滞后阈值化:**使用滞后阈值化将弱边缘与强边缘连接起来。如果弱边缘与强边缘相邻,则将其视为强边缘。
#### 2.1.2 参数调整和效果展示
Canny边缘检测算法有两个主要参数:
- **高阈值:**用于区分强边缘和弱边缘。
- **低阈值:**用于区分弱边缘和非边缘。
参数调整会影响边缘检测的结果。较高的阈值会导致检测到的边缘更少,而较低的阈值会导致检测到的边缘更多。
下表展示了不同参数设置下的Canny边缘检测结果:
| 高阈值 | 低阈值 | 效果 |
|---|---|---|
| 100 | 50 | 检测到较少边缘,边缘更清晰 |
| 50 | 25 | 检测到更多边缘,边缘更粗糙 |
### 2.2 Sobel边缘检测算法
#### 2.2.1 算法原理和步骤
Sobel边缘检测算法是一种一阶边缘检测算法,它通过以下步骤来检测图像中的边缘:
1. **卷积:**使用Sobel算子(一个3x3的卷积核)对图像进行卷积。
2. **计算梯度:**计算每个像素的梯度幅值和梯度方向。
3. **阈值化:**使用阈值对梯度幅值进行阈值化,以区分边缘和非边缘。
#### 2.2.2 参数调整和效果展示
Sobel边缘检测算法有一个主要参数:
- **阈值:**用于区分边缘和非边缘。
参数调整会影响边缘检测的结果。较高的阈值会导致检测到的边缘更少,而较低的阈值会导致检测到的边缘更多。
下表展示了不同阈值设置下的Sobel边缘检测结果:
| 阈值 | 效果 |
|---|---|
| 100 | 检测到较少边缘,边缘更清晰 |
| 50 | 检测到更多边缘,边缘更粗糙 |
### 2.3 Laplacian边缘检测算法
#### 2.3.1 算法原理和步骤
Laplacian边缘检测算法是一种二阶边缘检测算法,它通过以下步骤来检测图像中的边缘:
1. **拉普拉斯算子:**使用拉普拉斯算子(一个3x3的卷积核)对图像进行卷积。
2. **零交叉:**寻找拉普拉斯算子卷积结果中零交叉的点,这些点对应于图像中的边缘

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 OpenCV 边缘检测专栏,在这里,您将深入了解图像边缘检测的奥秘。从入门到实战,我们将揭示 OpenCV 中边缘检测算法的秘密,并探索深度学习如何赋能图像边缘检测。我们还将比较不同的算法,提供参数优化秘籍,并展示图像边缘检测在医学图像分析、自动驾驶、轮廓提取、图像分割、目标检测、图像增强、工业检测、遥感图像分析、图像配准、人脸识别、文本识别和生物医学图像分析等领域的实际应用。通过深入了解算法原理和实现,您将掌握 OpenCV 边缘检测的幕后机制。此外,我们还将提供性能优化技巧、常见问题分析和解决方案,帮助您提升图像处理速度和效率。加入我们,探索图像边缘检测的精彩世界,提升您的计算机视觉能力,让机器看得更智能!
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【10GBase-T1与传统以太网比较】:揭秘技术创新背后的5大优势

# 摘要
随着网络技术的快速发展,以太网技术已从基础的局域网连接发展到高速的数据传输。本文回顾了以太网技术的基础知识,并对10GBase-T1技术进行了全面概述。文章详细比较了10GBase-T1与传统以太网的传输速率、效率、连接距离、布线成本、兼容性及互操作性,揭示了其在数据中心、工业物联网和汽车网络中的实际应用优势。此外,本文还探讨了10GBase-T1技术未来发展的可能趋势、面临的主要挑战以
ABAP OOALV 开发实践:打造高性能ALV的5大策略

# 摘要
ABAP OOALV作为SAP ABAP编程中的一个关键组件,为开发者提供了一个强大的界面控制工具,用于展现和处理数据。本文首先介绍了ABAP OOALV的基本概念及其相较于传统ALV的优势,然后深入探讨了性能优化的理论基础和具体策略,重点分析了计算复杂度、数据库交互、数据读取和渲染优化等方面。在实践应用技巧章节,文中详细阐述了如何扩展标准功能,进行高级自定义,以及调试和问题诊断的实用技
【XADC高级特性:校准与监测功能深度探索】

# 摘要
本文系统地介绍了XADC技术的各个方面,包括其校准技术的基础、监测功能的深入解析以及在特定领域的应用实例。首先阐述了XADC校准技术的概念、原理及校准方法,强调了校准对保证数据准确性的重要性。接着,文章深入探讨了XADC监测功能的技术原理和关键性能指标,以及监测数据的有效获取和处理方式。在高级特性的应用章节中,文章分析了高级校准技术的实施及其性能优化,监测功能在实时系统中
【信号完整性故障排除】:ug475_7Series_Pkg_Pinout.pdf提供常见问题解决方案

# 摘要
本文系统地探讨了信号完整性(SI)的基础知识及其在7系列FPGA设计中的应用。文章从FPGA封装和引脚布局讲起,详细说明了不同封装类型的优势、应用场景及引脚配置原则。接着,深入探讨了信号分配策略,重点是关键信号的优先级和布线技巧,以及电源和地线布局。文章还分析了时钟和高速信号完整性问题,并提供了故障分析和排除方法。为了优化SI,本文讨论了电路板设计优化策略和去耦电容及终端匹配技
BY8301-16P模块揭秘:语音合成与播放的高效实现技巧

# 摘要
BY8301-16P模块是一款集成了先进语音合成技术的智能设备,该模块不仅提供了基础的语音播放功能,还优化了合成引擎以提高语音质量与自然度。本文详细介绍了该模块的语音合成基础、技术实现及其优化策略,并探讨了模块在智能硬件、企业级应用中的实际案例。文章还展望了BY8301-16P模块的发展前景,包括人工智能与多
【VC++中的USB设备枚举】:流程与代码实现的深度剖析
# 摘要
USB设备枚举是计算机外设连接过程中的关键步骤,涉及到硬件信号的交互以及软件层面的驱动配置。本文从USB设备的架构与规范出发,深入探讨了在Windows环境下设备驱动模型的原理,包括WDM与KMDF框架。通过对USB枚举理论基础的分析,介绍了硬件层面的交互过程以及软件实现的方法,如使用Win32 API和Windows Driver Kit (WDK)。案例分析
【Ubuntu USB转串口驱动安装疑难杂症】:专家经验分享

# 摘要
本文提供了在Ubuntu操作系统环境下,USB转串口驱动的详细概述和实践安装步骤。首先介绍了USB转串口驱动的理论基础,包括工作原理和
【数据库缓存应用最佳实践】:重庆邮电大学实验报告中的缓存管理技巧

# 摘要
数据库缓存作为提高数据处理效率的关键技术,其应用基础、机制、策略和工具是现代数据库管理中的重要组成部分。本文详细介绍了缓存机制的理论与实践,探讨了不同缓存策略和设计模式,及其在数据库中的集成和配置。同时,本文关注缓存应用中的高级实践,包括缓存一致性问题和安全策略,并分析了缓存技术在微服务架构中的角色。通过案例研究与分析,本文揭示了行业缓存
【Ansys高级仿真自动化】:复杂任务的自动化操作指南

# 摘要
随着仿真技术在工程领域的日益重要,Ansys高级仿真已成为提高设计效率和准确性的重要工具。本文全面概述了Ansys仿真环境的配置与优化,包括软件安装、性能调优及自定义模板的创建与管理。进一步地,本文着重探讨了仿真任务自动化执行的策略,从参数化设计到结果分析再到报告的自动生成。
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )