OpenCV边缘检测性能优化技巧:加速图像处理速度,提升效率
发布时间: 2024-08-13 03:01:55 阅读量: 89 订阅数: 42 

test.rar_OpenCV车辆计数_brownvgr_视频检测_车辆检测_车辆计数
# 1. OpenCV边缘检测简介**
OpenCV边缘检测是图像处理中一项基本技术,用于识别图像中的边缘和轮廓。边缘是图像中亮度或颜色发生突然变化的区域,通常代表物体或区域之间的边界。OpenCV提供了一系列边缘检测算法,包括Canny、Sobel和Laplacian。这些算法基于不同的数学原理,并具有各自的优势和劣势。
在选择边缘检测算法时,需要考虑图像的特性、所需的边缘类型以及计算资源的可用性。Canny算法通常被认为是通用边缘检测算法,因为它能够在噪声图像中检测出清晰的边缘。Sobel算法速度较快,但对噪声敏感,而Laplacian算法对噪声不敏感,但可能会产生断断续续的边缘。
# 2. 边缘检测算法优化
### 2.1 Canny边缘检测优化
Canny边缘检测算法是一种多阶段边缘检测算法,以其出色的边缘检测效果和抗噪性而闻名。为了优化Canny边缘检测算法的性能,可以从以下两个方面入手:
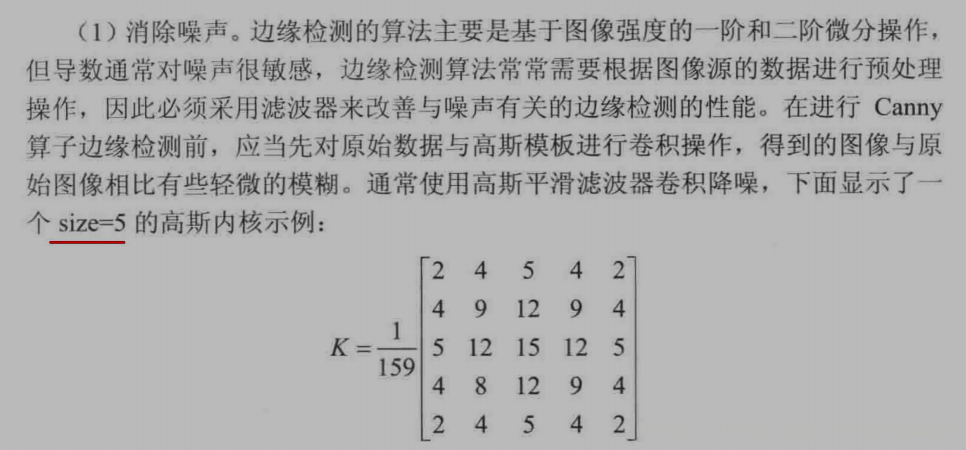
#### 2.1.1 降噪处理
图像噪声会对边缘检测的准确性产生负面影响。在应用Canny边缘检测算法之前,对图像进行降噪处理可以有效去除噪声,从而提高边缘检测的精度。常用的降噪方法包括:
- **高斯滤波:**高斯滤波是一种线性滤波器,可以平滑图像,去除高频噪声。其卷积核形状为钟形,中心权重较大,边缘权重较小。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 高斯滤波
blur = cv2.GaussianBlur(image, (5, 5), 0)
```
- **中值滤波:**中值滤波是一种非线性滤波器,可以去除椒盐噪声和脉冲噪声。其原理是将图像中的每个像素值替换为其邻域像素值的中值。
```python
# 中值滤波
median = cv2.medianBlur(image, 5)
```
#### 2.1.2 阈值选择
Canny边缘检测算法中,阈值的选择至关重要。阈值过低会检测出过多的边缘,导致图像中出现噪声;阈值过高会漏检边缘,导致边缘不完整。因此,需要根据图像的具体情况选择合适的阈值。
- **自适应阈值:**自适应阈值算法可以根据图像的局部信息动态调整阈值,从而提高边缘检测的鲁棒性。
```python
# 自适应阈值
thresh = cv2.adaptiveThreshold(image, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 2)
```
- **双阈值:**双阈值算法使用两个阈值,一个高阈值和一个低阈值。高阈值用于检测强边缘,低阈值用于检测弱边缘。
```python
# 双阈值
edges = cv2.Canny(image, 100, 200)
```
### 2.2 Sobel边缘检测优化
Sobel边缘检测算法是一种基于梯度计算的边缘检测算法。其卷积核包含水平和垂直两个方向的梯度算子,可以检测图像中水平和垂直方向的边缘。为了优化Sobel边缘检测算法的性能,可以从以下两个方面入手:
#### 2.2.1 卷积核选择
Sobel边缘检测算法的卷积核大小和形状会影响边缘检测的效果。通常情况下,较大的卷积核可以检测出更粗的边缘,而较小的卷积核可以检测出更细的边缘。
- **3x3卷积核:**3x3卷积核是最常用的Sobel卷积核,可以检测出水平和垂直方向的边缘。
```python
# 3x3 Sobel卷积核
sobelx = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=3)
sobely = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=3)
```
- **5x5卷积核:**5x5卷积核可以检测出更粗的边缘,但计算量也更大。
```python
# 5x5 Sobel卷积核
sobelx = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=5)
sobely = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=5)
```
#### 2.2.2 阈值处理
与Canny边缘检测算法类似,Sobel边缘检测算法也需要进行阈值处理,以区分边缘和非边缘像素。阈值的选择原则与Canny边缘检测算法相同。
- **自适应阈值:**自适应阈值算法可以根据图像的局部信息动态调整阈值,从而提高边缘检测的鲁棒性。
```python
# 自适应阈值
thresh = cv2.adaptiveThreshold(image, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 2)
```
- **双阈值:**双阈值算法使用两个阈值,一个高阈值和一个低阈值。高阈值用于检测强边缘,低阈值用于检测弱边缘。
```python
# 双阈值
edges = cv2.Canny(image, 100, 200)
```
### 2.3 Laplacian边缘检测优化
Laplacian边缘检测算法是一种基于二阶导数计算的边缘检测算法。其卷积核包含一个拉普拉斯算子,可以检测图像中亮度变化剧烈的区域。为了优化Laplacian边缘检测算法的性能,可以从以下两个方面入手:
#### 2.3.1 Laplacian算子选择
Laplacian边缘检测算法的拉普拉斯算子大小和形状会影响边缘检测的效果。通常情况下,较大的拉普拉斯算子可以检测出更粗的边缘,而较小的拉普拉斯算子可以检测出更细的边缘。
- **3x3拉普拉斯算子:**3x3拉普拉斯算子是最常用的拉普拉斯算子,可以检测出图像中亮度变化剧烈的区域。
```python
# 3
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 OpenCV 边缘检测专栏,在这里,您将深入了解图像边缘检测的奥秘。从入门到实战,我们将揭示 OpenCV 中边缘检测算法的秘密,并探索深度学习如何赋能图像边缘检测。我们还将比较不同的算法,提供参数优化秘籍,并展示图像边缘检测在医学图像分析、自动驾驶、轮廓提取、图像分割、目标检测、图像增强、工业检测、遥感图像分析、图像配准、人脸识别、文本识别和生物医学图像分析等领域的实际应用。通过深入了解算法原理和实现,您将掌握 OpenCV 边缘检测的幕后机制。此外,我们还将提供性能优化技巧、常见问题分析和解决方案,帮助您提升图像处理速度和效率。加入我们,探索图像边缘检测的精彩世界,提升您的计算机视觉能力,让机器看得更智能!
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
NVIDIA ORIN NX性能基准测试:超越前代的关键技术突破
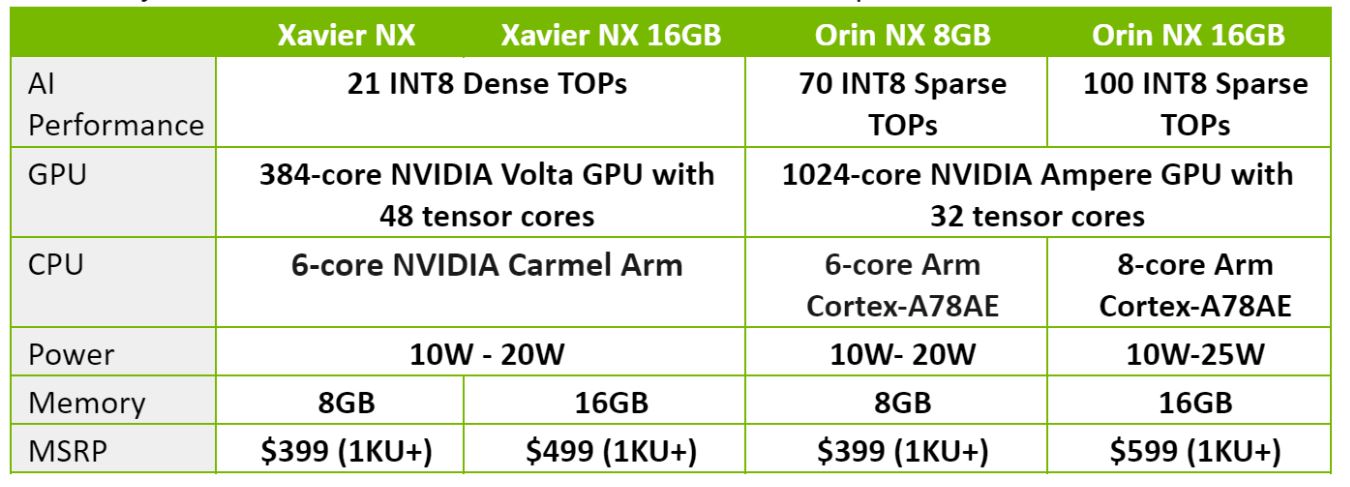
# 摘要
本文全面介绍了NVIDIA ORIN NX处理器的性能基准测试理论基础,包括性能测试的重要性、测试类型与指标,并对其硬件架构进行了深入分析,探讨了处理器核心、计算单元、内存及存储的性能特点。此外,文章还对深度学习加速器及软件栈优化如何影响AI计算性能进行了重点阐述。在实践方面,本文设计了多个实验,测试了NVI
图论期末考试必备:掌握核心概念与问题解答的6个步骤
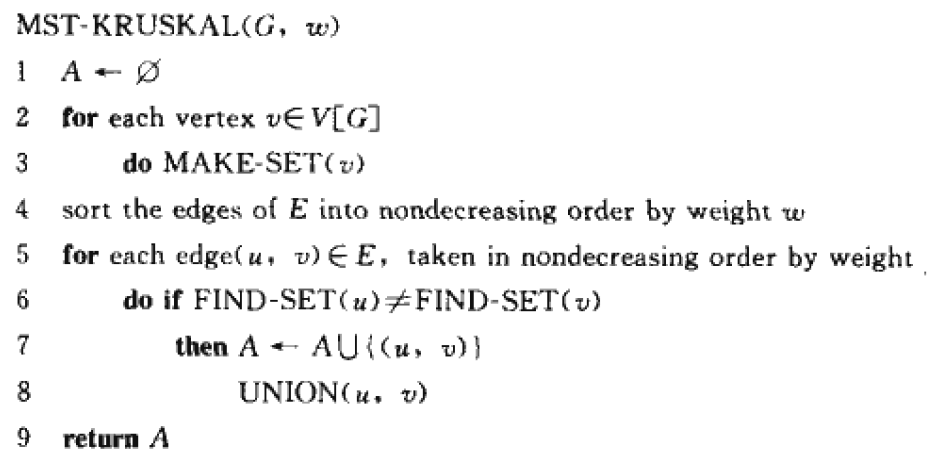
# 摘要
图论作为数学的一个分支,广泛应用于计算机科学、网络分析、电路设计等领域。本文系统地介绍图论的基础概念、图的表示方法以及基本算法,为图论的进一步学习与研究打下坚实基础。在图论的定理与证明部分,重点阐述了最短路径、树与森林、网络流问题的经典定理和算法原理,包括Dijkstra和Floyd-Warshall算法的详细证明过程。通过分析图论在社交网络、电路网络和交通网络中的实际应用,本文探讨了图论问题解决策略和技巧,包括策略规划、数学建模与软件
【无线电波传播影响因素详解】:信号质量分析与优化指南
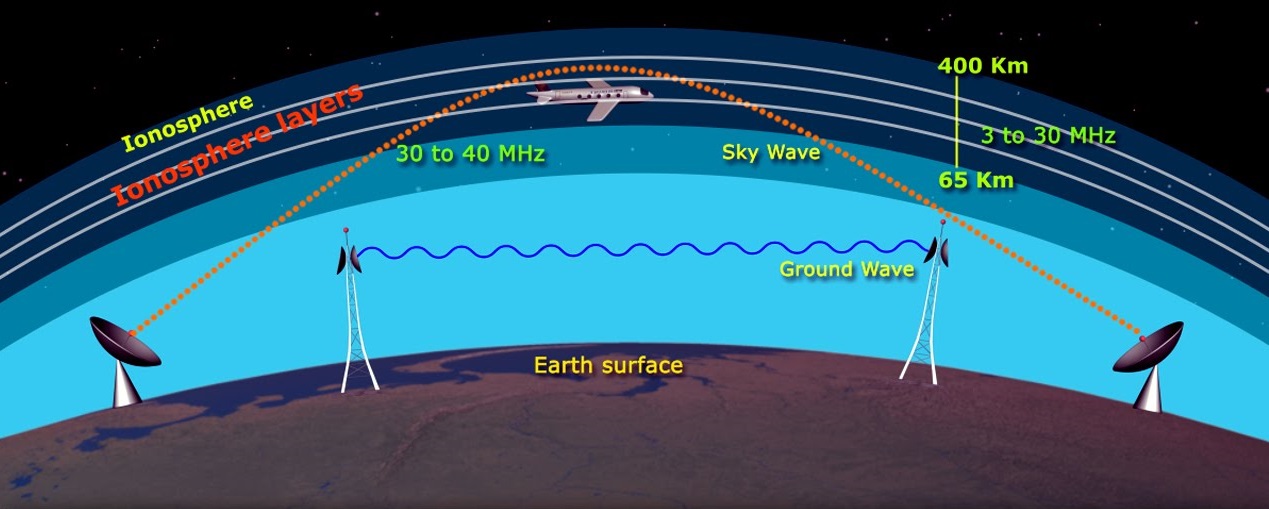
# 摘要
本文综合探讨了无线电波传播的基础理论、环境影响因素以及信号质量的评估和优化策略。首先,阐述了大气层、地形、建筑物、植被和天气条件对无线电波传播的影响。随后,分析了信号衰减、干扰识别和信号质量测量技术。进一步,提出了包括天线技术选择、传输系统调整和网络规划在内的优化策略。最后,通过城市、农村与偏远地区以及特殊环境下无线电波传播的实践案例分析,为实际应用提供了理论指导和解决方案。
# 关键字
无线电波传播;信号衰减;信号干扰;信号
FANUC SRVO-062报警:揭秘故障诊断的5大实战技巧

# 摘要
FANUC SRVO-062报警是工业自动化领域中伺服系统故障的常见表现,本文对该报警进行了全面的综述,分析了其成因和故障排除技巧。通过深入了解FANUC伺服系统架构和SRVO-062报警的理论基础,本文提供了详细的故障诊断流程,并通过伺服驱动器和电机的检测方法,以及参数设定和调整的具体操作
【单片微机接口技术速成】:快速掌握数据总线、地址总线与控制总线
# 摘要
本文深入探讨了单片微机接口技术,重点分析了数据总线、地址总线和控制总线的基本概念、工作原理及其在单片机系统中的应用和优化策略。数据总线的同步与异步机制,以及其宽度对传输效率和系统性能的影响是本文研究的核心之一。地址总线的作用、原理及其高级应用,如地址映射和总线扩展,对提升寻址能力和系统扩展性具有重要意义。同时,控制总线的时序控制和故障处理也是确保系统稳定运行的关键技术。最后
【Java基础精进指南】:掌握这7个核心概念,让你成为Java开发高手
# 摘要
本文全面介绍了Java语言的开发环境搭建、核心概念、高级特性、并发编程、网络编程及数据库交互以及企业级应用框架。从基础的数据类型和面向对象编程,到集合框架和异常处理,再到并发编程和内存管理,本文详细阐述了Java语言的多方面知识。特别地,对于Java的高级特性如泛型和I/O流的使用,以及网络编程和数据库连接技
电能表ESAM芯片安全升级:掌握最新安全标准的必读指南

# 摘要
ESAM芯片作为电能表中重要的安全组件,对于确保电能计量的准确性和数据的安全性发挥着关键作用。本文首先概述了ESAM芯片及其在电能表中的应用,随后探讨了电能表安全标准的演变历史及其对ESAM芯片的影响。在此基础上,深入分析了ESAM芯片的工作原理和安全功能,包括硬件架构、软件特性以及加密技术的应用。接着,本文提供了一份关于ESAM芯片安全升级的实践指南,涵盖了从前期准备到升级实施以及后
快速傅里叶变换(FFT)实用指南:精通理论与MATLAB实现的10大技巧
# 摘要
快速傅里叶变换(FFT)是信号处理和数据分析的核心技术,它能够将时域信号高效地转换为频域信号,以进行频谱分析和滤波器设计等。本文首先回顾FFT的基础理论,并详细介绍了MATLAB环境下FFT的使用,包括参数解析及IFFT的应用。其次,深入探讨了多维FFT、离散余弦变换(DCT)以及窗函数在FFT中的高级应用和优化技巧。此外,本文通过不同领域的应用案例
【高速ADC设计必知】:噪声分析与解决方案的全面解读

# 摘要
高速模拟-数字转换器(ADC)是现代电子系统中的关键组件,其性能受到噪声的显著影响。本文系统地探讨了高速ADC中的噪声基础、噪声对性能的影响、噪声评估与测量技术以及降低噪声的实际解决方案。通过对噪声的分类、特性、传播机制以及噪声分析方法的研究,我们能
【Python3 Serial数据完整性保障】:实施高效校验和验证机制
# 摘要
本论文首先介绍了Serial数据通信的基础知识,随后详细探讨了Python3在Serial通信中的应用,包括Serial库的安装、配置和数据流的处理。本文进一步深入分析了数据完整性的理论基础、校验和验证机制以及常见问题。第四章重点介绍了使用Python3实现Serial数据校验的方法,涵盖了基本的校验和算法和高级校验技
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )