探索节能之道:OpenCV SSD算法在低功耗设备上的优化
发布时间: 2024-08-14 14:50:55 阅读量: 5 订阅数: 11 

# 1. OpenCV SSD算法简介**
OpenCV SSD(Single Shot Detector)算法是一种单发检测算法,它可以一次性检测图像中的所有目标。SSD算法基于卷积神经网络(CNN),它使用一组卷积层和池化层来提取图像特征。然后,这些特征被输入到一个全连接层,该层输出每个目标的边界框和置信度分数。
SSD算法具有速度快、准确率高的特点,因此非常适合在低功耗设备上部署。在低功耗设备上,资源有限,因此需要使用高效的算法来实现实时的目标检测。SSD算法可以满足这一要求,因为它可以在低功耗设备上以较高的速度运行,同时仍然保持较高的准确率。
# 2. SSD算法的理论基础
### 2.1 卷积神经网络的原理
卷积神经网络(CNN)是一种深度学习模型,因其在图像处理和计算机视觉任务中的出色表现而闻名。CNN 的基本原理是使用卷积操作提取图像中的特征。
卷积操作涉及将一个称为卷积核的过滤器应用于输入图像。卷积核是一个小矩阵,通常为 3x3 或 5x5。卷积核在图像上滑动,并与图像的每个局部区域进行逐元素相乘。然后将相乘的结果求和,并输出为一个新的特征图。
通过重复应用卷积层,CNN 可以从图像中提取越来越复杂的特征。例如,第一个卷积层可能检测边缘和形状,而后续的卷积层可能检测更高级别的特征,如对象和面部。
### 2.2 单发检测算法的演进
单发检测(SSD)算法是用于目标检测的深度学习模型。与传统的目标检测算法(如 R-CNN 和 Fast R-CNN)不同,SSD 算法能够在一张图像中同时检测多个对象,并且速度更快。
SSD 算法的演进可以分为以下几个阶段:
- **OverFeat:**OverFeat 算法是第一个使用卷积神经网络进行目标检测的算法。它使用滑动窗口方法,在图像的不同位置应用卷积神经网络。
- **YOLO:**YOLO(You Only Look Once)算法是第一个单发检测算法。它将图像分成网格,并为每个网格单元预测一个边界框和一个类概率。
- **SSD:**SSD 算法是 YOLO 算法的改进版本。它使用特征金字塔网络(FPN)来处理不同尺度的对象,并使用多个卷积层来预测边界框和类概率。
**代码块:**
```python
import torch
import torch.nn as nn
import torch.nn.functional as F
class SSD(nn.Module):
def __init__(self, num_classes=21):
super(SSD, self).__init__()
self.num_classes = num_classes
# ... (省略其他代码)
def forward(self, x):
# ... (省略其他代码)
confidences = F.softmax(confidences, dim=2)
return locations, confidences
```
**逻辑分析:**
这段代码实现了 SSD 算法的前向传播。它首先通过特征金字塔网络(FPN)将输入图像处理为多个特征图。然后,它使用卷积层预测每个特征图上的边界框和类概率。最后,它应用 softmax 函数来计算类概率。
**参数说明:**
* `x`: 输入图像。
* `num_classes`: 要检测的对象类别的数量。
* `locations`: 预测的边界框。
* `confidences`: 预测的类概率。
# 3. SSD算法的实践应用**
### 3.1 SSD算法的模型结构和训练过程
SSD算法的模型结构主要包括以下几个部分:
- **卷积层:**用于提取图像特征。
- **辅助卷积层:**用于生成不同尺度的特征图。
- **预测层:**用于预测每个特征图上的目标位置和类别。
SSD算法的训练过程主要分为两个阶段:
1. **基础网络训练:**使用ImageNet数据集训练一个卷积神经网络作为基础网络。
2.
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
OpenCV SSD算法专栏全面解析了目标检测领域的核心技术,从入门到精通,深入剖析算法原理,提供实战指南。文章涵盖性能优化、应用拓展、优劣势对比、嵌入式系统应用、智能交通、医疗影像等多个方面,深入探讨算法的优势和挑战。专栏还提供了算法训练、评估、部署和优化等实战落地指导,以及在复杂场景、实时检测、低功耗设备和边缘计算等场景中的应用探索。通过深入分析算法性能瓶颈,专栏为提升算法效率提供了优化秘籍,助力开发者打造高效、精准的目标检测模型。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Python列表与数据库:列表在数据库操作中的10大应用场景
# 1. Python列表与数据库的交互基础
在当今的数据驱动的应用程序开发中,Python语言凭借其简洁性和强大的库支持,成为处理数据的首选工具之一。数据库作为数据存储的核心,其与Python列表的交互是构建高效数据处理流程的关键。本章我们将从基础开始,深入探讨Python列表与数据库如何协同工作,以及它们交互的基本原理。
## 1.1
Python列表的函数式编程之旅:map和filter让代码更优雅
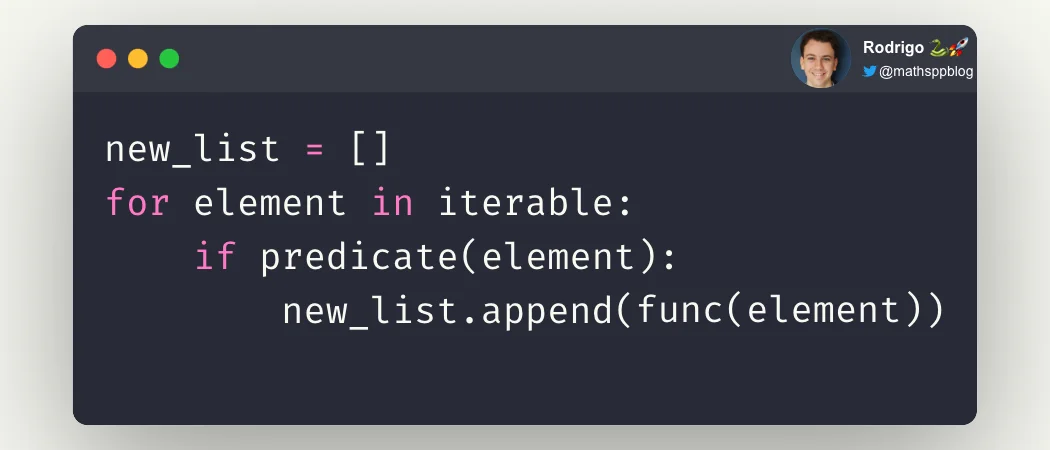
# 1. 函数式编程简介与Python列表基础
## 1.1 函数式编程概述
函数式编程(Functional Programming,FP)是一种编程范式,其主要思想是使用纯函数来构建软件。纯函数是指在相同的输入下总是返回相同输出的函数,并且没有引起任何可观察的副作用。与命令式编程(如C/C++和Java)不同,函数式编程
Python并发控制:在多线程环境中避免竞态条件的策略

# 1. Python并发控制的理论基础
在现代软件开发中,处理并发任务已成为设计高效应用程序的关键因素。Python语言因其简洁易读的语法和强大的库支持,在并发编程领域也表现出色。本章节将为读者介绍并发控制的理论基础,为深入理解和应用Python中的并发工具打下坚实的基础。
## 1.1 并发与并行的概念区分
首先,理解并发和并行之间的区别至关重要。并发(Concurre
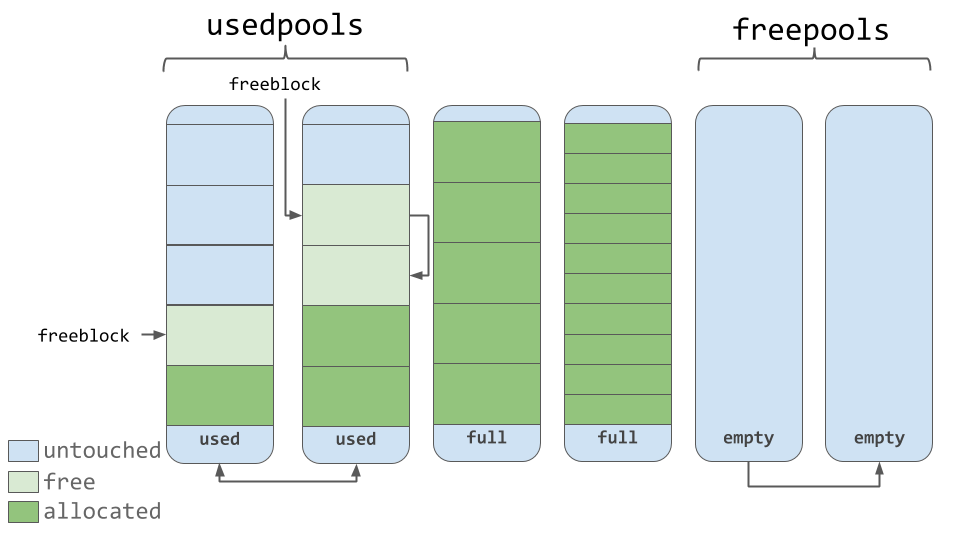
Python list remove与列表推导式的内存管理:避免内存泄漏的有效策略
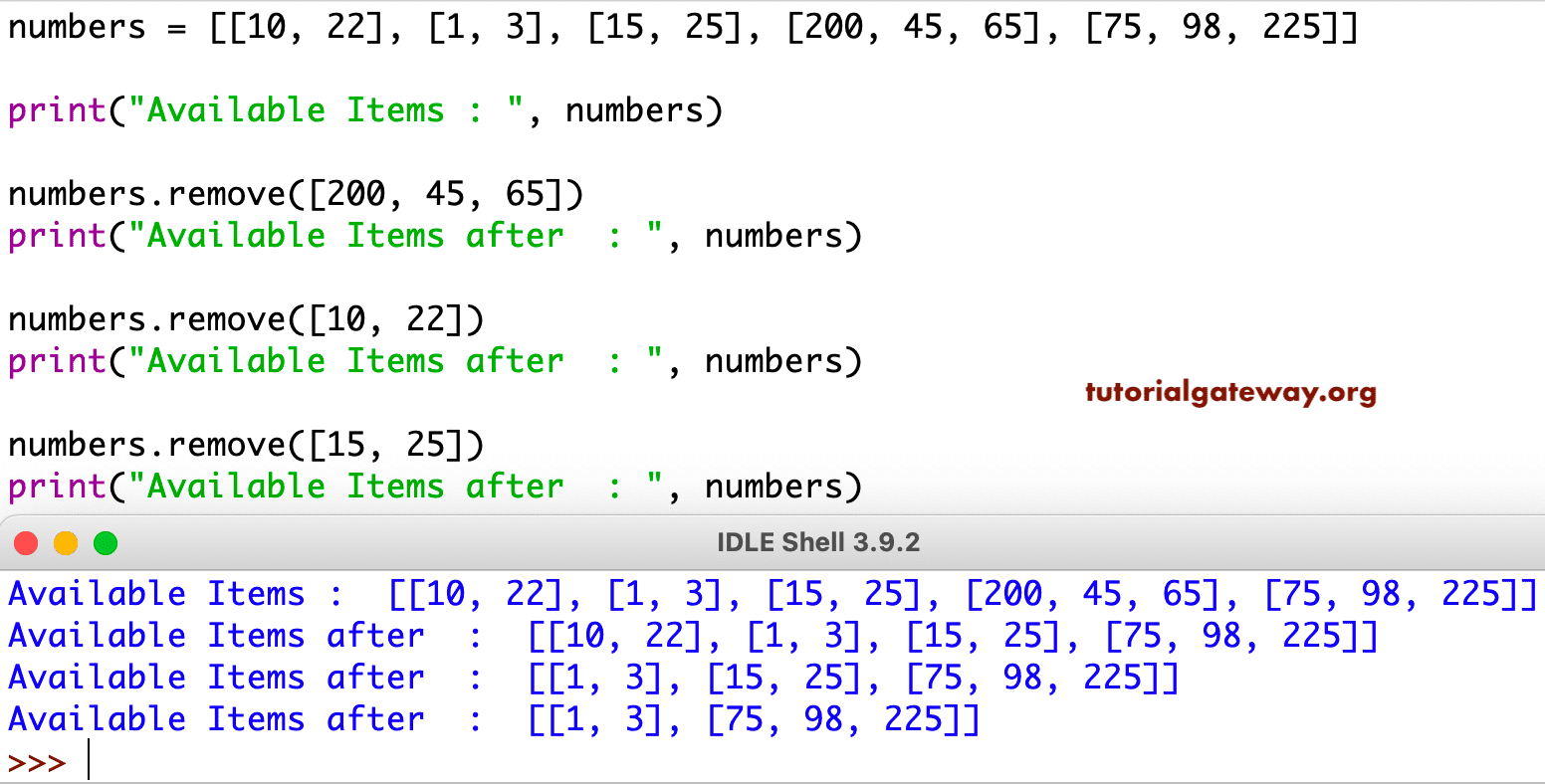
# 1. Python列表基础与内存管理概述
Python作为一门高级编程语言,在内存管理方面提供了众多便捷特性,尤其在处理列表数据结构时,它允许我们以极其简洁的方式进行内存分配与操作。列表是Python中一种基础的数据类型,它是一个可变的、有序的元素集。Python使用动态内存分配来管理列表,这意味着列表的大小可以在运行时根据需要进
【动态类型处理】:让Python字典更灵活的关键技术

# 1. Python字典的动态类型基础
Python字典是该语言中最强大的数据结构之一,它允许使用键值对进行存储和检索数据,而这得益于其动态类型特性。动态类型意味着变量的类型可以在运行时改变,不必在编写代码时声明。这一特性使得Python代码更加灵活,但也带来了一定的运行时开销。理解Python字典的动态类型基础是成为一名高效Py
【递归与迭代决策指南】:如何在Python中选择正确的循环类型
# 1. 递归与迭代概念解析
## 1.1 基本定义与区别
递归和迭代是算法设计中常见的两种方法,用于解决可以分解为更小、更相似问题的计算任务。**递归**是一种自引用的方法,通过函数调用自身来解决问题,它将问题简化为规模更小的子问题。而**迭代**则是通过重复应用一系列操作来达到解决问题的目的,通常使用循环结构实现。
## 1.2 应用场景
递归算法在需要进行多级逻辑处理时特别有用,例如树的遍历和分治算法。迭代则在数据集合的处理中更为常见,如排序算法和简单的计数任务。理解这两种方法的区别对于选择最合适的算法至关重要,尤其是在关注性能和资源消耗时。
## 1.3 逻辑结构对比
递归
Python索引的局限性:当索引不再提高效率时的应对策略

# 1. Python索引的基础知识
在编程世界中,索引是一个至关重要的概念,特别是在处理数组、列表或任何可索引数据结构时。Python中的索引也不例外,它允许我们访问序列中的单个元素、切片、子序列以及其他数据项。理解索引的基础知识,对于编写高效的Python代码至关重要。
## 理解索引的概念
Python中的索引从0开始计数。这意味着列表中的第一个元素
Python函数性能优化:时间与空间复杂度权衡,专家级代码调优
# 1. Python函数性能优化概述
Python是一种解释型的高级编程语言,以其简洁的语法和强大的标准库而闻名。然而,随着应用场景的复杂度增加,性能优化成为了软件开发中的一个重要环节。函数是Python程序的基本执行单元,因此,函数性能优化是提高整体代码运行效率的关键。
## 1.1 为什么要优化Python函数
在大多数情况下,Python的直观和易用性足以满足日常开发
【Python项目管理工具大全】:使用Pipenv和Poetry优化依赖管理

# 1. Python依赖管理的挑战与需求
Python作为一门广泛使用的编程语言,其包管理的便捷性一直是吸引开发者的亮点之一。然而,在依赖管理方面,开发者们面临着各种挑战:从包版本冲突到环境配置复杂性,再到生产环境的精确复现问题。随着项目的增长,这些挑战更是凸显。为了解决这些问题,需求便应运而生——需要一种能够解决版本
索引与数据结构选择:如何根据需求选择最佳的Python数据结构
# 1. Python数据结构概述
Python是一种广泛使用的高级编程语言,以其简洁的语法和强大的数据处理能力著称。在进行数据处理、算法设计和软件开发之前,了解Python的核心数据结构是非常必要的。本章将对Python中的数据结构进行一个概览式的介绍,包括基本数据类型、集合类型以及一些高级数据结构。读者通过本章的学习,能够掌握Python数据结构的基本概念,并为进一步深入学习奠
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )