Yamaha机器人项目案例研究:成功应用的关键因素,专家的实战经验
发布时间: 2024-12-17 13:35:05 订阅数: 2 

YAMAHA 雅马哈机器人 MF75D

参考资源链接:[Yamaha机器人编程手册:RCX控制器与4轴机械手命令详解](https://wenku.csdn.net/doc/3buyfmee8t?spm=1055.2635.3001.10343)
# 1. Yamaha机器人项目概览
在工业自动化领域,Yamaha机器人项目是一次革新性的尝试,旨在通过先进的机器人技术改进制造业的生产效率和质量控制。该项目不仅关注于硬件的创新,更加重视软件的智能化,以实现更加灵活和自适应的生产环境。
为了达到这些目标,Yamaha机器人集成了最新的控制技术和机器视觉系统,并应用了先进的机器学习算法,使机器人能够实时调整自己的行为以适应不断变化的生产条件。项目中采用了模块化设计,以便于未来技术的升级和功能扩展。
本章节将从宏观角度出发,介绍Yamaha机器人项目的整体构想,包括项目的核心目标、预期的影响以及初步的实施计划。通过这篇文章,读者将获得对整个项目框架的初步理解,并为深入探索Yamaha机器人背后的科学与技术打下坚实的基础。
# 2. 项目需求分析与理论框架
## 2.1 项目背景与目标
### 2.1.1 机器人技术在制造业的应用趋势
随着工业4.0时代的到来,制造业正在经历前所未有的变革。机器人技术作为自动化和智能化的重要组成部分,在制造业中的应用越来越广泛。机器人的应用趋势主要体现在以下几个方面:
- **柔性化生产**:现代制造业强调按需生产,机器人能够在不同生产线之间快速切换,满足多样化、小批量的生产需求。
- **高度集成**:机器人与各种传感器、计算机视觉、物联网等技术的集成,使得生产线能够实现高度的信息化、智能化。
- **提高效率与质量**:机器人可以精确地执行重复性任务,并且24小时不间断工作,极大提高了生产效率和产品质量的一致性。
- **安全和人机协作**:更加安全的机器人设计和人机协作界面,使得机器人与人类工人可以安全地并肩工作。
### 2.1.2 Yamaha项目的特定需求分析
在制造业中,Yamaha项目的机器人需要满足以下特定需求:
- **高精度定位**:在装配或焊接等精密制造过程中,机器人必须实现高精度定位,保证产品质量。
- **快速适应变化**:产品和工艺的变化要求机器人能够快速调整,减少换线时间。
- **易操作性与维护性**:由于机器人将被部署在多个工厂,因此要求机器人系统具有良好的用户界面,并且易于维护。
- **成本效益**:在满足上述需求的同时,机器人还需要具有成本效益,以适应市场经济的竞争环境。
## 2.2 理论框架的构建
### 2.2.1 工业机器人的基本理论
工业机器人的基本理论涵盖运动学、动力学以及控制论等方面:
- **运动学**:研究机械臂的运动,包括位置、速度和加速度等参数的数学描述和计算。
- **动力学**:分析和计算机械臂在执行任务时的力和力矩,为机械设计和性能优化提供依据。
- **控制论**:涉及机器人运动的精确控制,包括PID控制、自适应控制、预测控制等。
### 2.2.2 自动化和智能化的技术路径
工业机器人的自动化和智能化技术路径主要包括:
- **传感器集成**:引入更多类型的传感器,如力矩传感器、视觉传感器等,以增强机器人的感知能力。
- **机器学习与人工智能**:利用机器学习算法训练机器人进行复杂任务,以及改善决策过程。
- **数据通信与网络化**:实现机器人与工厂内其他设备和系统的数据交换,提升整个生产过程的智能化水平。
## 2.3 风险评估与应对策略
### 2.3.1 预期风险的识别与分类
在Yamaha项目的实施过程中,我们识别并分类了以下预期风险:
- **技术风险**:包括机器人系统本身的技术成熟度、可靠性以及集成过程中的兼容性问题。
- **市场风险**:市场对新系统接受程度的不确定性,以及竞争对手可能的市场反应。
- **操作风险**:操作人员对新系统的熟悉程度以及潜在的操作失误。
- **供应链风险**:关键零部件供应的稳定性以及成本控制。
### 2.3.2 风险缓解措施的制定与执行
为了降低上述风险,我们制定了一系列应对措施:
- **技术验证**:在项目初期进行充分的技术验证,确保技术的可行性与稳定性。
- **市场调研与分析**:进行深入的市场调研,分析潜在客户需求,并建立灵活的市场策略。
- **培训与教育**:为操作人员提供全面的培训,确保他们能熟练使用机器人系统。
- **供应商管理**:与供应商建立长期合作关系,确保零部件供应的稳定性,并积极寻求成本优化方案。
# 3. Yamaha机器人关键技术应用
## 3.1 精确控制技术的实现
### 3.1.1 传感器技术与数据采集
在制造业中,传感器技术是机器人的“感官”,其性能直接影响机器人工作的精度和效率。Yamaha机器人项目中使用了多种传感器来实现精确控制,包括位置传感器、力矩传感器、视觉传感器等。
位置传感器负责监测机器人的各个关节以及末端执行器的实时位置,以确保其精确地移动到预设的坐标点。力矩传感器则用于检测机器人在操作过程中施加的力,防止因外力作用导致的操作失误或损害。视觉传感器作为机器人的眼睛,用于识别和定位操作对象,对于提高机器人的适应性至关重要。
数据采集系统负责处理传感器收集到的大量信息。首先需要对信号进行滤波处理,消除噪声干扰,然后进行模数转换,最后进行数据预处理,如归一化和特征提取。经过这些步骤,系统可以得到稳定、可靠的数据,为机器人的精确控制提供支持。
### 3.1.2 控制算法的优化与实施
为了实现高精度的运动控制,Yamaha机器人项目采用了先进的控制算法。这些算法主要分为两类:经典控制算法和智能控制算法。
经典控制算法中,PID(比例-积分-微分)控制是最常用的控制策略之一,它利用比

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Vivado DDS IP核:从入门到精通】:深入解析波形生成与性能调整

参考资源链接:[VIVADO DDS IP核详解:设置、频率计算与仿真实战](https://wenku.csdn.net/doc/6412b5eebe7fbd1778d44e92?sp
【Filco圣手二代多语言设置】:从A到Z的完整教程

参考资源链接:[Filco圣手二代:多语言操作指南与设置详解](https://wenku.csdn.net/doc/9bvnictv8o?spm=1055.2635.3001.10343)
# 1. Filco圣手二代键盘概述
## 简介
Filco圣手二代键盘作为机械键盘界的一颗璀璨明星,其精湛的制造工艺和卓越的打字体验为无数键盘爱好者所津津乐道。本章将从基础信息入手,带领读者概
【Git版本控制入门】:Windows下的Git安装与配置指南

参考资源链接:[加速下载:Windows Git 官方版本百度网盘分享](https://wenku.csdn.net/doc/1o88jkk5vw?spm=1055.2635.3001.10343)
# 1. Git版本控制概述
## 1.1 版本控制系统的必要性
在软件开发和项目管理中,版本控制系统是不可或缺的工具,它允许开发者追踪代码的历史变化、协作开发,并管理不同版本之间的差异。Git是当前广
【LSI SAS 9311-8i监控与日志分析】:专家教你如何防患于未然
参考资源链接:[LSI SAS 9311-8i PCIe适配器用户指南](https://wenku.csdn.net/doc/604komobop?spm=1055.2635.3001.10343)
# 1. LSI SAS 9311-8i监控与日志分析概述
随着数据存储技术的发展,LSI SAS 9311-8i作为一款广泛使用的存储控制器,其性能监控与日志分析的重要性日益凸显。监控与日志分析不仅为系
RS-485网络构建秘诀:CAHO P961多设备通信解决方案

参考资源链接:[CAHO_P961温控器RS-485 MODBUS编程与连接详解](https://wenku.csdn.net/doc/64617f5e5928463033b0f182?spm=1055.2635.3001.10343)
# 1. RS-485网络概述与技术标准
RS-485网络是工业通信领域常
跨平台PDF文档阅读解决方案:PDFView.ocx在多操作系统中的表现分析(多系统兼容性指南)

参考资源链接:[YCanPDF PDFView OCX 控件功能与使用方法详解](https://wenku.csdn.net/doc/6412b6cdbe7fbd1778d48088?spm=1055.2635.3001.10343)
# 1. 跨平台PDF阅
【安全机制探索】:文件系统防御策略与实施

参考资源链接:[MIKE 11 模型设置教程:从断面数据到水文参数](https://wenku.csdn.net/doc/7fx3ry4v8x?spm=1055.2635.3001.10343)
# 1. 文件系统安全的基本概念
文件系统安全是信息安全领域中一个重要的组成部分,它涉及到保护存储在服务器和工作站上的数据不被未授权的访问、修改、泄露或破坏。在日常工作中,文件系统安
CatBoost的高级应用:解决不平衡数据问题的利器
参考资源链接:[清华镜像源安装NGBoost、XGBoost和CatBoost:数据竞赛高效预测工具](https://wenku.csdn.net/doc/64532205ea0840391e76f23b?spm=1055.2635.3001.10343)
# 1. CatBoost简介与不平衡数据问题概述
在当今的数据驱动世界中,机器学习模型的性能在很大程度上取决于用于训练
【预算编制与控制艺术】:EBS打造高效预算管理体系的秘诀
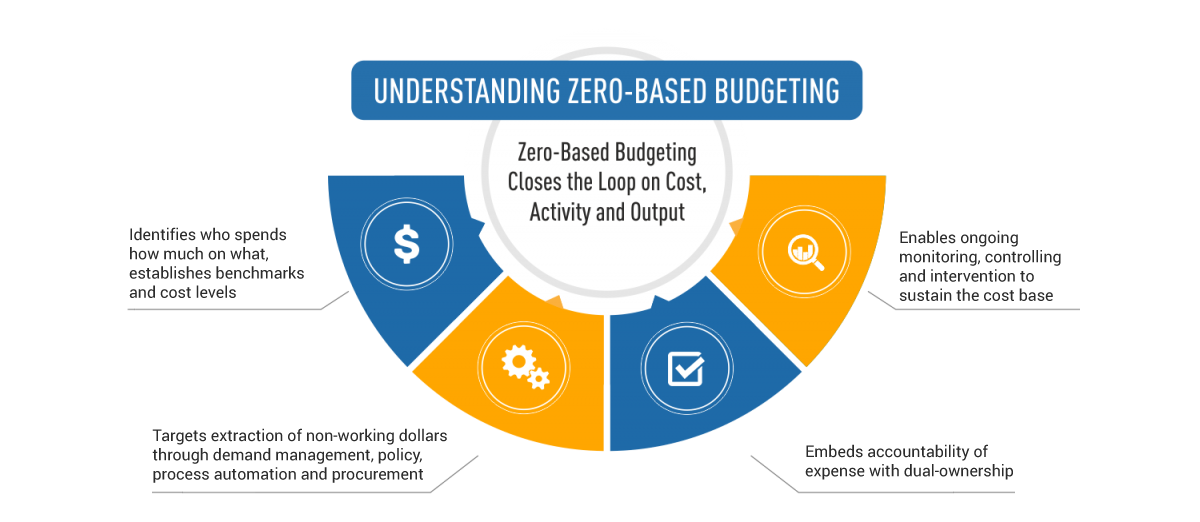
参考资源链接:[Oracle EBS财务全模块中文操作手册:详尽PDF教程](https://wenku.csdn.net/doc/9bvdfq7hzs?spm=1055.2635.3001.10343)
# 1. 预算编制与控制的概念与重要性
在企业资源规划(ERP)的实施过程中,预算编制与控制是核心管理活动之一。预算的编制和控制不仅影响企业的经营决策,还能对整体财务管理的效率和效果产生深远影响。
#
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )