STM32 I2C通信实战案例分析:工业环境下的应用秘诀
发布时间: 2025-01-10 14:41:06 阅读量: 5 订阅数: 11 

OpenCV部署YOLOv5-pose人体姿态估计(C++和Python双版本).zip

# 摘要
本文系统地介绍了STM32与I2C通信技术的基础知识、实践技巧以及在工业应用中的高级开发与案例研究。首先阐述了I2C通信的理论基础,并详细讨论了STM32 I2C接口的配置、初始化以及故障排除方法。接着,文中探讨了工业级I2C设备的选型与集成,实时监控,数据分析以及提高通信可靠性和稳定性的策略。随后,文章深入到STM32 I2C通信的高级开发技巧,包括多设备管理、高级通信协议的实现和模块化设计。最后,通过案例研究,展示了STM32在工业自动化中的具体应用,并对未来技术发展和通信标准的探讨做出了展望。
# 关键字
STM32;I2C通信;故障排除;实时监控;数据分析;模块化设计;工业自动化
参考资源链接:[STM32 HAL库实战:轻松配置IIC读取AT24C02](https://wenku.csdn.net/doc/6401abebcce7214c316e9f97?spm=1055.2635.3001.10343)
# 1. STM32与I2C通信基础
## 简介STM32与I2C
在现代嵌入式系统设计中,STM32微控制器因其高性能、低功耗而被广泛采用,尤其是在需要串行通信的应用中。I2C(Inter-Integrated Circuit)是一种多主机的串行通信总线,被设计为只使用两根线就能连接微控制器和其他设备。本章将介绍STM32与I2C通信的基础知识。
## STM32中的I2C功能
STM32微控制器的I2C功能是通过硬件实现的,支持多主机模式,允许一个I2C总线上连接多个主设备。同时,它也支持高达3.4Mbps的高速I2C通信,使得在工业和消费级应用中可以有效地进行数据交换。本章将深入分析STM32如何支持这些I2C通信特性,并为后续章节的技术探讨打下基础。
# 2. STM32 I2C通信的理论基础与实践技巧
## 2.1 I2C通信原理详解
### 2.1.1 I2C协议的物理层特征
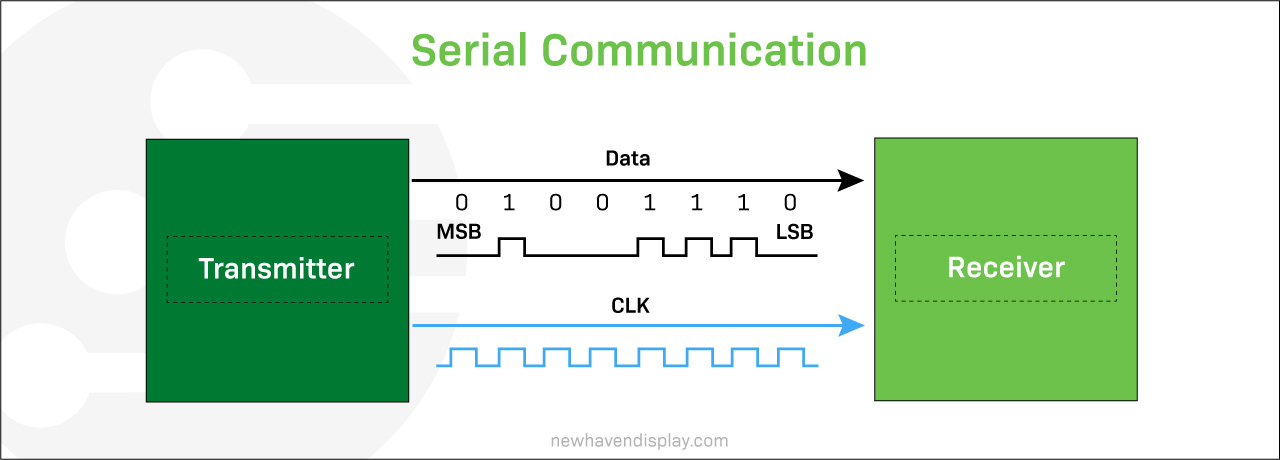
I2C(Inter-Integrated Circuit)是一种多主机、多从机的串行通信总线协议,其物理层特征包括:
- **多主机支持**:系统中可以有多个主设备,但同一时间只能有一个主设备控制总线。
- **串行数据传输**:数据以8位为一组在单一数据线(SDA)上串行传输。
- **串行时钟线**:控制数据传输速率的时钟信号在另一个独立的时钟线(SCL)上提供。
- **开漏输出和上拉电阻**:I2C设备使用开漏输出,需要外部上拉电阻以确保逻辑高电平。
- **地址识别**:每个从设备都有一个唯一的7位地址,在数据传输前由主设备指定。
### 2.1.2 I2C协议的数据传输机制
I2C协议支持双向数据传输,其基本机制如下:
- **起始和停止条件**:数据传输前,主设备会发送起始条件(SDA从高电平跳变到低电平,而SCL保持高电平),传输结束后发送停止条件(SDA从低电平跳变到高电平,而SCL保持高电平)。
- **地址帧**:起始条件后,主设备发送7位地址帧和一个读/写位,指示接下来是读操作还是写操作。
- **应答/非应答信号**:数据帧后跟随一个应答位,主设备或从设备通过将SDA拉低来表示应答信号。
- **数据帧**:数据以8位为单位进行传输,数据位之后跟随一个应答位。
- **仲裁和时钟同步**:多主机系统中,通过仲裁机制来防止总线冲突;时钟同步则允许时钟拉低来延长时钟周期。
## 2.2 STM32 I2C接口的配置与初始化
### 2.2.1 STM32 I2C接口的硬件抽象层(HAL)配置
STM32微控制器的HAL库提供了对I2C接口的简化配置和使用方式,包括:
- **GPIO配置**:首先需要配置I2C所用的GPIO引脚为开漏输出,并设置相应的上拉电阻。
- **I2C初始化结构体**:定义一个I2C_HandleTypeDef结构体,其中包含I2C初始化参数,如设备模式(主设备或从设备)、时钟速度、地址模式等。
- **初始化函数调用**:通过HAL_I2C_Init函数来初始化I2C接口。
示例代码如下:
```c
/* I2C1 GPIO Configuration
PA15 ------> I2C1_SCL
PA14 ------> I2C1_SDA
*/
/* I2C1 init function */
void MX_I2C1_Init(void)
{
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000; // 100 kHz
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
}
```
### 2.2.2 I2C时钟速度与设备地址的设置
I2C时钟速度是根据系统时钟频率和所需的总线速度计算得出的,同时设备地址是根据I2C设备规格进行设置。
- **时钟速度计算**:STM32的I2C时钟速度计算公式是根据STM32的内部时钟频率和I2C的预分频值进行设定。
- **设备地址设置**:设备地址应设置为与相连的I2C外设地址一致。
```c
/* Assuming system clock is 72MHz, for 100kHz SCL: */
uint16_t psc = (uint16_t) ((SystemCoreClock / 2) / 100000) - 1;
hi2c1.Init.PeripheralClock = 72000000;
hi2c1.Init.Timing = 0x10707CBB;
```
以上代码中`psc`变量用于设置时钟预分频值,`Timing`参数详细配置了时钟速度及其它时序参数。
## 2.3 STM32 I2C通信的故障排除
### 2.3.1 常见通信错误分析与解决方法
在使用STM32进行I2C通信时,可能会遇到多种错误,比如:
- **NACK (Non-Acknowledge)**:从设备没有发送应答信号,通常是由于设备地址错误或设备未准备好。
- **Bus Error**:总线错误通常是由于总线冲突或硬件故障引起。
解决方法包括检查设备地址是否正确、确保设备硬件连接正确、检查电源和接地连接,以及重新配置时钟速度和时序参数。
### 2.3.2 I2C通信速率优化与调试技巧
为了优化I2C通信速率,需要进行以下操作:
- **优化时钟设置**:调整时钟速度和预分频值,找到最佳性能和稳定性之间的平衡点。
- **减少数据量**:如果可能,只传输必要的数据量。
- **多主设备通信**:在多主设备环境中,合理安排主设备间的通信顺序和间隔时间。
调试技巧方面,利用STM32的调试工具和HAL库提供的调试函数,可以实时监控I2C通信状态,例如使用HAL_I2C_GetState函数来获取当前I2C状态。
以上是对STM32 I2C通信的理论基础和实践技巧的探讨,从I2C协议的基本原理到STM32设备的配置和初始化,再到故障排除及性能优化,为开发者在进行I2C通信开发时提供了详细的指导和解决方案。接下来的章节将深入讨论STM32 I2C通信在工业应用中的实践,以及一些高级开发技巧。
# 3. STM32 I2C通信在工业应用中的实践
在现代工业应用中,通信协议的选择至关重要,因为它直接影响到系统的稳定性和效率。I2C作为一种广泛使用的两线串行通信协议,以其简单性、灵活性和多设备支持能力,在工业领域拥有广阔的应用前景。在本章节中,我们将探索STM32如何通过I2C通信协议实现对工业级设备的有效集成,并且讨论如何通过实时监控与数据分析来提升I2C通信的可靠性和稳定性。
## 3.1 工业级I2C设备的选型与集成
在工业应用中,设备的选型通常需要考虑多个因素,比如设备的环境适应性、通信距离、通信速率和设备的可用性。I2C设备的选择也不例外,我们需要对设备进行细致的挑选,并通过实际集成来确保它们能够无缝地与STM32微控制器配合工作。
### 3.1.1 I2C温度传感器的应用案例
一个典型的工业级I2C设备就是温度传感器,其在多种工业环境中都扮演着重要角色。例如,在热处理炉或者冷藏设备中,温度传感器需要提供精确的温度读数以保障生产流程的正确进行。
在使用STM32进行温度监控时,I2C温度传感器的集成流程如下:
1. **设备选型**:选择支持I2C通信协议,并且具有精确测量范围的温度传感器,如DS1631。
2. **硬件连接**:将传感器的I2C总线(SCL和SDA线)连接至STM32微控制器的相应I2C引脚。
3. **软件配置**:利用STM32的HAL库配置I2C接口参数,如时钟速度、寻址模式等。
4. **数据读取**:编写代码实现从温度传感器读取数据,实现温度的实时监控。
以下是一个简单的代码块,展示了如何在STM32中读取DS1631温度传感器的温度值:
```c
#include "stm32f1xx_hal.h"
#include "ds1631.h" // 自定义DS1631的驱动头文件
I2C_HandleTypeDef hi2c1; // 假设使用I2C1
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C1_Init(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_I2C1_Init();
float temperature = 0.0f;
uint8_t temp_buffer[2];
while (1)
{
// 读取温度数据
HAL_I2C_Mem_Read(&hi2c1, DS1631_ADDR, TEMP_REG, I2C_MEMADD_SIZE_8BIT, temp_buffer, 2, HAL_MAX_DELAY);
temperature = ds1631_CalculateTemperature(temp_buffer);
// 使用温度数据
printf("Current Temperature: %.2f°C\n", temperature);
HAL_Delay(1000); // 每秒读取一次
}
}
static void MX_I2C1_Init(void)
{
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 400000; // 400 kHz I2C频率
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Toad for DB2解决方案:10个专业技巧助你成为数据库管理大师
# 摘要
本文全面介绍了Toad for DB2这一强大的数据库管理工具,涵盖了从基础安装配置到高级查询优化、自动化管理以及故障诊断的全方位实践知识。文中详细解析了Toad for DB2的用户界面和工具,数据库对象和安全管理的细节,还包括了SQL编程、性能监控与调优的高级技巧。此外,本文还探讨了如何创建和管理自动化任务,进行脚本调试与错误处理,以及批量数据操作与变更管理。最后,分享了Toa
CAA3D标注技术深度剖析:原理、应用与实战演练
# 摘要
CAA3D标注技术作为一种先进的三维标注方法,正逐渐应用于包括工业设计、虚拟现实和医疗健康等多个领域。本文首先概述了CAA3D标注技术的基本概念及其理论基础,然后详细探讨了其在不同领域的具体应用,如3D模型构建、逆向工程、VR/AR内容开发、医学图像标注等。文章还通过实战演练的方式,介绍了标注
Nginx错误日志分析技巧:快速定位并解决启动失败的秘诀

# 摘要
Nginx作为高性能的HTTP和反向代理服务器,其错误日志是监控、诊断和优化服务器性能的关键资源。本文第一章概述了Nginx错误日志的重要性及其作用。第二章深入解析了错误日志的结构和内容,包括日志级别、时间戳、常见错误类型,以及关键的HTTP状态码和错误代码。第三章讨论
宇龙V4.8数控仿真软件与实际加工对比分析:为什么它是行业的选择?

# 摘要
本文对宇龙V4.8数控仿真软件进行了全面的概述和分析。首先介绍了数控加工的基础理论,包括数控机床工作原理、核心技术及其精度和质量控制。接着深入探讨了宇龙V4.8的理论基础,其中包括仿真工作机制、在数控教学中的应用及优化发展趋势。之后,通过对比分析,探讨了宇龙V4.8与实际数控加工的仿真准确性、安全性和操作便捷性,以及成本效益。文章还通过行业
【TongWeb V8.0新手必备】:7步打造快速响应的Web应用

# 摘要
本文旨在详细介绍TongWeb V8.0的部署、性能优化以及高级功能应用。首先对TongWeb V8.0的基础架构和快速搭建Web应用环境的步骤进行了全面介绍,包括系统兼容性、软件安装、以及安装配置过程。接着,文章深入探讨了Web应用性能优化技巧,涵盖代码优化、资源压缩
【Mann-Whitney Test实战高手】:独立样本分析的终极指南
# 摘要
Mann-Whitney测试是一种非参数统计方法,用于比较两个独立样本的中位数是否存在显著差异。本文首先介绍了Mann-Whitney测试的基本概念和理论基础,包括假设检验、独立样本的定义、测试工作原理及统计量的计算方法。接着,文章详细阐述了Mann-Whitney测试的实践步骤,包括数据的准备、使用不同统计软件进行测试,以及结果的解读和报告撰写。此外,文章还探讨了Mann-Whitney测试的高级应用,如多组比较、非参数效应量的计算以及缺失数据的处理策略。最后,通过案例分析,本文展示了Mann-Whitney测试在实际研究中的应用,并对研究结果进行了解释和讨论。
# 关键字
Ma
【蓝牙通信稳定性研究】:CH9141DS1在复杂环境下的性能揭秘
# 摘要
蓝牙通信作为一种无线技术,广泛应用于短距离数据传输中。本文首先概述了蓝牙技术及其标准,重点介绍了CH9141DS1芯片的特点与优势。随后,文章分析了复杂环境下蓝牙通信所面临的挑战,探讨了信号干扰、环境噪声等因素对通信稳定性的影响,并提出了保证连接稳定性和数据传输速率的关键要素。为了验证CH9141D
操作系统课程设计报告:揭秘操作系统设计的9个必备要素与实施细节

# 摘要
本文系统地介绍了操作系统的概念、组成和实践应用,并深入探讨了其安全设计与性能优化的关键技术。通过对系统内核、内存管理、文件系统、多任务处理、设备驱动以及安全机制的分析,本文阐述了操作系统的基本功能和设计要素。同时,针对操作系统安全性的各个方面,包括认证授权
单片机基础编程教程:掌握这5大技能,编程不再是难题
# 摘要
本论文全面介绍了单片机编程的各个方面,从基础硬件和编程语言的概述到高级应用和项目实战技巧的提升。首先,概述了单片机编程的重要性及其硬件基础,包括CPU、存储器、输入/输出端口、外围设备等关键组成部分。接着,深入探讨了汇编语言和C语言在单片机编程中的应用,以及集成开发环境(IDE)和编译烧录工具等编程环境和工具的使用。在实践技巧方面,详细说
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )