STM32 I2C通信终极指南:手把手教你成为HAL库和STM32CubeMX大师(24小时精通I2C通信)
发布时间: 2025-01-10 12:45:11 阅读量: 7 订阅数: 9 

【基于STM32设计的音乐播放器】包括:PCB源文件+源码+论文
# 摘要
STM32微控制器是广泛应用于嵌入式系统中的高性能处理器。本文深入探讨了STM32平台上的I2C通信机制,包括基础理论、实践指南、高级应用,以及故障诊断与排除。首先,介绍了I2C通信协议的工作原理、数据传输机制、硬件特性以及电气特性。随后,提供了使用HAL库进行I2C配置、软件实现、以及STM32CubeMX配置向导的实用指南。文章还涵盖了I2C设备驱动开发、多主从设备通信策略,以及通信性能优化。最后,分析了I2C通信故障的诊断、预防措施,并通过实际案例展示了跨平台通信的解决方案。本文旨在为STM32微控制器的开发者提供一个全面的I2C通信参考资源。
# 关键字
STM32;I2C通信;HAL库;通信协议;故障诊断;设备驱动开发
参考资源链接:[STM32 HAL库实战:轻松配置IIC读取AT24C02](https://wenku.csdn.net/doc/6401abebcce7214c316e9f97?spm=1055.2635.3001.10343)
# 1. STM32 I2C通信概述
在嵌入式系统设计中,I2C通信协议作为一种广泛使用的串行通信协议,以其简单性、多主机支持和节省布线资源的优势脱颖而出。STM32微控制器系列作为行业内的主流选择,对I2C通信的支持提供了硬件上的便利。本章将介绍STM32微控制器中的I2C通信模块,为读者搭建一个理解I2C通信在STM32平台下应用的理论基础和实践框架。
# 2. I2C通信基础理论
### 2.1 I2C协议的原理和特点
#### 2.1.1 I2C协议的工作模式
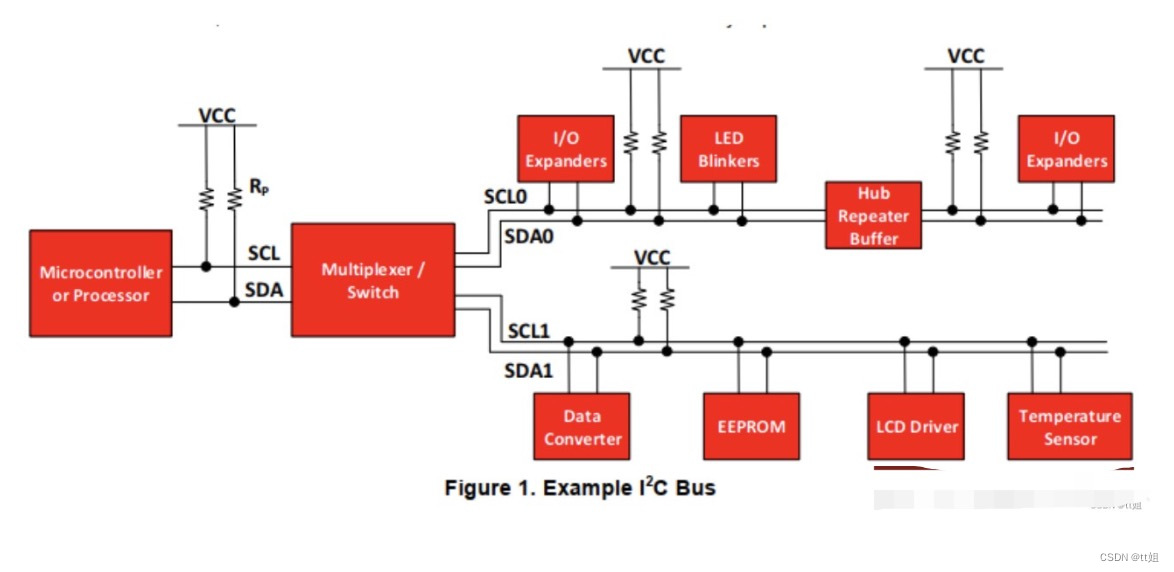
I2C(Inter-Integrated Circuit)是一种串行通信协议,它允许多个从设备与一个或多个主设备进行通信。在I2C协议中,所有的通信都是由主设备发起的,它通过控制时钟线(SCL)和数据线(SDA)来实现数据的传输。数据的传输始终是8位字节,每发送一个字节后,接收方必须发送一个应答信号(ACK)表示接收成功,或者一个非应答信号(NACK)表示接收失败。
工作模式主要有两种:标准模式和快速模式。标准模式下,数据速率可达100kbps;快速模式下,数据速率可达400kbps。此外,还有高速模式(3.4Mbps)和超快速模式(5Mbps),但这些更高数据速率的模式需要使用专门的硬件支持。
#### 2.1.2 I2C的数据传输机制
数据在I2C总线上是按帧传输的,每个帧由一个起始信号、数据字节、应答位以及一个停止信号组成。起始信号标志着一次数据传输的开始,而停止信号标志着一次传输的结束。
在数据传输过程中,数据是在时钟信号的上升沿之后的稳定期被从设备读取,这样可以确保数据的稳定性和可靠性。I2C协议中还包含一个地址位,用于标识不同的从设备,主设备通过发送地址位来选择特定的从设备进行通信。
### 2.2 STM32 I2C硬件特性
#### 2.2.1 STM32 I2C引脚定义和配置
STM32微控制器中的I2C接口通常有三根线:SCL(时钟线)、SDA(数据线)和一个可选的复位线(如使用软件复位或硬件复位功能)。在硬件设计时,需要将这些引脚配置为I2C功能。
在STM32中,可以通过寄存器配置I2C的GPIO引脚模式,以及是否启用内部上拉电阻。比如使用STM32CubeMX配置工具,可以在图形界面中选择相应的引脚,并设置其模式为“Alternate Function”来启用I2C功能。
#### 2.2.2 STM32 I2C时钟速率和速率配置
I2C通信速率的配置是通过设置I2C的时钟预分频器(I2C_CR2寄存器中的FREQ字段)来实现的。根据STM32的参考手册,可以计算出预分频值,以达到所需的I2C总线速度。
例如,如果STM32的内部时钟为8MHz,我们想配置I2C为100kbps的标准模式,我们需要的SCL频率为:
```
SCL = 内部时钟频率 / (2 + (时钟预分频器 * 2))
```
通过适当配置时钟预分频值,我们可以得到100kbps的I2C速率。在STM32CubeMX中,可以在配置I2C界面的“Clock Speed”选项中选择标准模式或快速模式,工具会自动计算并设置合适的预分频器。
### 2.3 I2C通信的电气特性
#### 2.3.1 信号电平和电压容限
I2C协议定义了电平转换的标准,特别是对于5V和3.3V系统。为了确保不同电压级别的设备可以安全地通信,必须使用I2C总线上的上拉电阻来保证线路的高电平。
STM32微控制器通常支持3.3V逻辑电平,这意味着它可以直接与3.3V的I2C设备通信。但是,如果STM32与5V的I2C设备通信,就需要外部上拉电阻来实现电压转换,或者使用能够承受更高电压的STM32设备。
#### 2.3.2 噪声滤波和容错机制
为了避免由于电气噪声导致的信号错误,I2C协议在物理层采用了噪声滤波机制。它要求数据信号在时钟信号的高电平期间至少保持稳定250纳秒(快速模式下),这样可以有效过滤掉一些尖峰干扰。
除了物理层的噪声滤波,I2C协议还定义了一些逻辑层的容错机制,比如在数据传输过程中,如果从设备暂时无法接收或发送数据,它可以延长时钟信号的低电平周期,这样主设备就不得不等待,直到从设备准备就绪。这个机制称为时钟延伸(Clock Stretching),增加了I2C通信的灵活性和健壮性。
### 2.4 I2C通信的多主控制和地址识别
I2C协议允许配置多个主设备在同一总线上工作。这种模式称为多主模式(Multi-Master Mode)。在多主模式下,任何一个主设备都可以尝试控制总线,并开始数据传输。如果两个主设备几乎同时尝试控制总线,那么就会发生冲突。I2C协议通过总线仲裁(Arbitration)机制来解决这种冲突,保证总线控制权的合理分配。
总线仲裁发生在SDA线上,当一个主设备发送一个高电平,而另一个主设备发送一个低电平时,发送高电平的主设备会检测到线上的低电平(因为I2C是线与),从而知道自己失去总线控制权,必须停止发送数据。
I2C从设备地址识别是通过发送设备地址加读/写位的方式来完成的。每个从设备都有一个7位的地址(某些设备支持10位地址)。主设备发送地址和读/写位来选择要通信的从设备。当从设备识别到与自己的地址匹配的信号时,它会响应主设备的请求。
# 3. STM32 I2C通信实践指南
在深入理解了I2C通信的基础理论之后,我们将步入实践领域,探讨如何在STM32微控制器上实现I2C通信。本章节将详细指导你如何使用STM32的硬件抽象层(HAL)库来配置和使用I2C,解释软件层面的实现细节,并向你展示STM32CubeMX这一强大的配置向导如何简化这一过程。
## 3.1 使用HAL库配置I2C
### 3.1.1 HAL库I2C初始化函数的使用
使用HAL库初始化I2C接口是实现I2C通信的第一步。STM32 HAL库提供了一系列函数来配置I2C接口,包括设置I2C频率、模式(主机或从机)、地址模式等。以下是配置I2C的典型步骤:
1. **实例化I2C句柄**:在代码中定义一个I2C句柄,用于后续所有与该I2C接口相关的操作。
```c
I2C_HandleTypeDef I2cHandle;
```
2. **配置I2C句柄参数**:通过结构体`I2C_HandleTypeDef`填充I2C接口的配置,包括总线速度、设备地址、时钟极性和相位等。
```c
I2cHandle.Instance = I2C1; // 使用I2C1接口
I2cHandle.Init.ClockSpeed = 100000; // 设置I2C速率为100kHz
I2cHandle.Init.DutyCycle = I2C_DUTYCYCLE_2;
I2cHandle.Init.OwnAddress1 = 0;
I2cHandle.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
I2cHandle.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
I2cHandle.Init.OwnAddress2 = 0;
I2cHandle.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
I2cHandle.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
```
3. **调用初始化函数**:使用`HAL_I2C_Init()`函数完成I2C接口的初始化。
```c
HAL_I2C_Init(&I2cHandle);
```
这一过程中,你需要注意配置参数的准确性和合理性,错误的配置可能导致I2C通信不成功。
### 3.1.2 HAL库I2C中断和DMA配置
在一些特定应用场景下,比如需要同时处理其他任务或者需要处理大量数据时,使用中断或直接内存访问(DMA)可以显著提高I2C通信的效率。以下是配置I2C中断和DMA的基本步骤:
1. **配置NVIC中断优先级**:确保中断能够正确响应。
```c
HAL_NVIC_SetPriority(I2C1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(I2C1_IRQn);
```
2. **初始化DMA控制器**:如果使用DMA,需要先初始化DMA控制器,并设置其传输参数。
```c
DMA_HandleTypeDef hdma_i2c1_rx;
hdma_i2c1_rx.Instance = DMA1_Channel6;
hdma_i2c1_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_i2c1_rx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_i2c1_rx.Init.MemInc = DMA_MINC_ENABLE;
hdma_i2c1_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_i2c1_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_i2c1_rx.Init.Mode = DMA_NORMAL;
hdma_i2c1_rx.Init.Priority = DMA_PRIORITY_LOW;
HAL_DMA_Init(&hdma_i2c1_rx);
__HAL_LINKDMA(&I2cHandle, hdmarx, hdma_i2c1_rx);
```
3. **启动I2C DMA传输**:在数据读取或写入前启动DMA传输。
```c
HAL_I2C_Receive_DMA(&I2cHandle, (uint16_t)address, (uint8_t *)buffer, length);
```
使用DMA和中断能够释放CPU资源,提高数据处理效率,特别是在进行大批量或高速数据传输的场合。
## 3.2 I2C通信的软件实现
### 3.2.1 I2C数据读写操作
I2C的数据读写是通信中的核心部分。在HAL库中,数据读写操作可以非常简单地通过以下函数完成:
1. **I2C数据写入**:`HAL_I2C_Master_Transmit()`用于主模式下的数据发送。
```c
HAL_StatusTypeDef HAL_I2C_Master_Transmit(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout);
```
2. **I2C数据读取**:`HAL_I2C_Master_Receive()`用于主模式下的数据接收。
```c
HAL_StatusTypeDef HAL_I2C_Master_Receive(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout);
```
在这两个函数中,`DevAddress`是I2C设备地址,`pData`指向要发送或接收数据的缓冲区,`Size`是数据的长度,`Timeout`是超时时间。
### 3.2.2 I2C通信状态检查和错误处理
在进行I2C通信时,检查通信状态和处理错误是保证通信可靠性的关键步骤。HAL库提供了多种方式来检查I2C通信状态和处理错误。
```c
HAL_I2C_GetState(&I2cHandle); // 获取I2C通信状态
```
如果状态不是`HAL_I2C_STATE_READY`,则表示通信存在问题。这时,可以通过以下函数进行错误处理:
```c
HAL_I2C_ErrorCallback(&I2cHandle); // 错误回调函数
```
在回调函数中,可以根据返回的错误代码判断错误类型,并采取相应的恢复措施。
## 3.3 STM32CubeMX I2C配置向导
### 3.3.1 在STM32CubeMX中配置I2C参数
STM32CubeMX是ST官方提供的图形化配置工具,它能够根据用户选择的参数自动生成初始化代码,极大地简化了配置过程。
1. **打开STM32CubeMX并创建项目**:选择目标STM32微控制器型号后,点击“Start Project”。
2. **配置I2C接口**:在Pinout视图中,点击I2C接口对应的引脚,将其配置为I2C模式,并设置为所需的模式(例如I2C1)。
3. **设置I2C参数**:在Configuration视图中,进入I2C设置界面,选择“Mode”为“Master”,并设置I2C速率、地址模式等参数。
4. **生成代码**:配置完成并点击“Project”菜单下的“Generate Code”,STM32CubeMX会生成一个包含I2C配置代码的项目。
### 3.3.2 生成代码和项目结构
生成的代码遵循HAL库的规范,包含完整的初始化函数以及用于读写数据的函数。项目结构通常如下所示:
- `Core/Src`:存放源代码,如main.c。
- `Core/Inc`:存放头文件,如main.h。
- `Drivers/STM32<family>_HAL_Driver/Inc`:HAL库的头文件目录。
- `Drivers/STM32<family>_HAL_Driver/Src`:HAL库的源代码目录。
在项目生成后,开发者可以在此基础上添加自己的业务逻辑代码,使项目顺利运行。
通过本章节的介绍,我们已经了解了如何使用STM32 HAL库配置和实现I2C通信,以及如何利用STM32CubeMX简化这一过程。这为实际的I2C通信应用打下了坚实的基础。下一章节,我们将深入探讨STM32 I2C通信的高级应用,包括设备驱动开发、多主从设备通信策略及性能优化等。
# 4. STM32 I2C通信高级应用
## 4.1 I2C设备驱动开发
### 4.1.1 设备驱动框架
在嵌入式系统中,I2C设备驱动的开发是实现硬件与软件通信的桥梁。STM32的I2C驱动框架通常包含以下几个关键部分:
1. **硬件抽象层(HAL)**:这个层提供了与硬件相关的接口,用于初始化和操作I2C硬件模块。
2. **设备驱动层(Driver)**:负责实现特定I2C设备的功能,例如初始化设备,读取和写入数据等。
3. **应用层**:为上层应用提供接口,使得应用层能够不关心硬件细节地调用I2C设备的功能。
在编写I2C驱动时,开发者需要考虑到以下几点:
- **初始化**: 在驱动加载时,必须初始化I2C硬件和软件配置。
- **地址管理**: 管理I2C设备的地址,包括7位和10位地址。
- **数据传输**: 实现数据的发送和接收函数。
- **设备控制**: 包括重置、唤醒和休眠等设备控制操作。
- **中断和DMA支持**: 如果使用中断和/或DMA,驱动需要正确配置这些特性以提高性能。
下面的代码块是一个抽象的I2C设备驱动的框架示例:
```c
#include "stm32f1xx_hal.h" // 根据具体的STM32系列选择合适的头文件
// 初始化I2C硬件
HAL_StatusTypeDef I2CHardwareInit(I2C_HandleTypeDef *hi2c);
// 发送数据到I2C设备
HAL_StatusTypeDef I2CSendData(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout);
// 从I2C设备接收数据
HAL_StatusTypeDef I2CReceiveData(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout);
// 驱动加载函数
int I2CDriverLoad(struct i2c_device *device);
// 驱动卸载函数
int I2CDriverUnload(struct i2c_device *device);
// 具体设备的操作函数
int I2CSensorOperation(struct i2c_device *device, enum i2c_command cmd, void *arg);
```
在上述代码中,我们定义了几个基本函数来处理I2C初始化、发送数据、接收数据以及加载和卸载驱动。此外,还包括了针对特定设备的操作函数,用于执行例如传感器读取等特定任务。
每个函数的参数和返回值定义了它们的作用和行为。例如,`I2CSendData`函数接受设备句柄、设备地址、数据指针、数据大小和超时时间作为参数,返回操作的状态。
### 4.1.2 设备驱动的加载和卸载
驱动的加载和卸载是驱动程序管理的两个基本操作。在STM32系统中,通常会通过调用平台总线(platform bus)的机制来加载和卸载驱动。
在驱动加载函数中,通常会执行以下步骤:
- **检查设备**: 检查设备是否存在以及设备是否正确配置。
- **初始化**: 配置I2C硬件,设置地址、速率、时钟等。
- **注册**: 将驱动与特定设备实例关联起来,设置设备ID和操作函数。
卸载函数则会执行相反的操作:
- **注销**: 将驱动与设备解除关联。
- **恢复默认设置**: 将I2C硬件恢复到初始状态。
- **释放资源**: 如果分配了任何资源(如内存),则需要释放这些资源。
下面是一个简化的驱动加载和卸载的示例代码:
```c
int I2CDriverLoad(struct i2c_device *device) {
// 检查设备
if (device == NULL || !device->present) {
return -ENODEV;
}
// 初始化I2C硬件
I2CHardwareInit(device->hi2c);
// 注册设备操作
device->ops.send = I2CSendData;
device->ops.receive = I2CReceiveData;
device->ops.specific = I2CSensorOperation;
// 其他配置...
return 0;
}
int I2CDriverUnload(struct i2c_device *device) {
// 注销设备操作
device->ops.send = NULL;
device->ops.receive = NULL;
device->ops.specific = NULL;
// 恢复I2C硬件默认设置
// 释放资源...
return 0;
}
```
在这个例子中,`I2CDriverLoad`函数负责将驱动程序的操作函数注册到`i2c_device`结构中。如果驱动程序卸载,`I2CDriverUnload`将取消这些注册并执行清理任务。
## 4.2 多主设备和主从设备通信策略
### 4.2.1 多主设备通信机制
在复杂的系统中,可能会存在多个设备同时需要使用I2C总线进行通信的情况,这时就需要使用多主设备通信机制。STM32的I2C硬件支持多主设备操作,但是软件需要适当地设计和编程以避免总线冲突。
为了实现多主设备通信,可以采取以下措施:
- **总线仲裁**: STM32的I2C硬件可以自动处理总线仲裁。当两个或更多的主设备试图同时控制总线时,硬件会决定哪个主设备可以使用总线。当一个主设备失去仲裁时,它会接收到一个特定的状态标志。
- **总线冲突检测**: 驱动程序需要能够处理总线冲突,这可能涉及到检测总线空闲时间,并在适当的时候进行重试。
- **避免总线占用**: 在使用完总线之后,应该尽快释放总线以允许其他主设备使用。
### 4.2.2 主从设备协同工作模式
在主从设备协同工作模式下,一个设备充当主设备(通常是处理器),而其他设备充当从设备(例如传感器、存储器)。为了有效地进行通信,必须精心设计协议和调度策略。
- **协议设计**: 主设备需要定义一套完整的通信协议,以确保对所有从设备的访问和数据传输是有序和有效的。例如,可以为不同的从设备分配不同的地址和指令集。
- **时间调度**: 主设备可能需要实现一种调度算法来决定何时与特定的从设备通信。调度算法需要考虑到实时性、优先级和总线利用效率等因素。
- **错误处理**: 错误处理机制对于保持系统稳定运行至关重要。主设备需要能够处理从设备无响应或错误响应的情况。
下面是一个简化的示例,展示如何实现主从设备的协同工作模式:
```c
// 主设备发送读取请求到从设备
HAL_StatusTypeDef MasterReadFromSlave(uint16_t slaveAddress, uint8_t regAddress, uint8_t *data, uint16_t size) {
// 发送起始信号和从设备地址加写命令
HAL_I2C_Master_Transmit(&hi2c1, slaveAddress << 1, ®Address, 1, 1000);
// 发送重起始信号和从设备地址加读命令
HAL_StatusTypeDef status = HAL_I2C_Master_Receive(&hi2c1, slaveAddress << 1 | 1, data, size, 1000);
return status;
}
// 主设备发送写入请求到从设备
HAL_StatusTypeDef MasterWriteToSlave(uint16_t slaveAddress, uint8_t regAddress, uint8_t *data, uint16_t size) {
// 发送起始信号和从设备地址加写命令
uint8_t *packet = malloc(size + 1);
packet[0] = regAddress;
memcpy(&packet[1], data, size);
HAL_StatusTypeDef status = HAL_I2C_Master_Transmit(&hi2c1, slaveAddress << 1, packet, size + 1, 1000);
free(packet);
return status;
}
```
在这个例子中,`MasterReadFromSlave`和`MasterWriteToSlave`函数分别用于从和向从设备发送读写请求。主设备通过I2C总线与从设备通信,控制数据的流向。
## 4.3 I2C通信性能优化
### 4.3.1 硬件流控制和中断优化
对于I2C通信,硬件流控制可以提高通信的稳定性和效率。STM32的I2C硬件支持流控制,可以减少软件中的轮询需求,使CPU资源得到更有效的利用。
- **使用DMA(直接内存访问)**: 在进行大量数据传输时,使用DMA可以显著减少CPU的负载。DMA允许I2C直接访问内存,无需CPU介入即可完成数据传输。
- **中断处理**: 启用I2C中断可以在接收到数据或者完成发送后自动触发中断服务程序,这样可以避免在主循环中不断检查I2C状态,提高程序的响应性和效率。
### 4.3.2 代码优化和调试技巧
代码优化是提高I2C通信性能的一个重要方面。有效的代码优化包括:
- **精简代码**: 避免不必要的计算和循环。
- **内存管理**: 确保动态分配的内存得到有效的管理,避免内存泄漏。
- **代码可读性**: 保持代码清晰和有良好的注释,这有助于未来的维护和调试。
调试技巧包括:
- **使用调试工具**: 利用STM32CubeIDE等集成开发环境的调试工具进行断点、单步执行和数据监视。
- **逻辑分析仪**: 使用逻辑分析仪观察和分析I2C总线上的信号,检查通信的时序和协议符合性。
- **性能分析器**: 使用性能分析器监控和分析程序的性能,找出瓶颈所在。
下面展示了一个使用DMA和中断优化I2C通信性能的代码片段:
```c
// 初始化DMA用于I2C
void I2CDMAInit(I2C_HandleTypeDef *hi2c, DMA_HandleTypeDef *hdma) {
// DMA channel configuration for I2C transmit/receive
// ...
}
// 从设备读取数据的中断处理函数
void HAL_I2C_MemRxCpltCallback(I2C_HandleTypeDef *hi2c) {
// 读取数据后处理
// ...
}
// 向设备发送数据的中断处理函数
void HAL_I2C_MemTxCpltCallback(I2C_HandleTypeDef *hi2c) {
// 发送数据后处理
// ...
}
// 使用DMA和中断发送数据
HAL_StatusTypeDef I2CSendDataDMA(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size) {
// 配置DMA传输
// ...
return HAL_I2C_Mem_Write_DMA(hi2c, DevAddress, MemAddress, MemAddSize, pData, Size);
}
```
在这段代码中,通过定义和使用DMA传输,我们能有效地从I2C设备接收或发送大量数据,而且不会占用CPU资源,因为数据传输过程是由硬件完成的。通过中断回调函数,我们可以在数据传输完成后执行特定的操作。
通过将DMA与中断相结合,我们可以实现对STM32 I2C通信性能的优化,同时保持代码的清晰和高效。
# 5. STM32 I2C通信故障诊断与排除
## 5.1 常见I2C通信问题及解决方案
### 5.1.1 通信故障分类
在I2C通信过程中,由于硬件故障、电气特性不匹配、软件编程错误等原因,可能导致多种通信故障。分类可以帮助我们系统地识别和解决问题。常见的通信故障可以分为以下几类:
- **初始化失败**:I2C设备初始化时,可能因为配置错误或硬件故障而失败,导致无法正常通信。
- **数据传输错误**:在数据传输过程中,可能出现丢包、错误的数据接收或发送等问题。
- **地址冲突**:如果有多个设备试图在同一时刻使用相同的地址进行通信,将会造成地址冲突。
- **时序问题**:I2C通信对时序要求较为严格,不恰当的时钟速率设置或噪声干扰都可能导致时序问题。
### 5.1.2 故障诊断流程
为了有效解决I2C通信故障,可以遵循以下诊断流程:
1. **检查硬件连接**:确保I2C总线上的SCL和SDA线路没有断路或短路,并检查设备连接是否正确。
2. **验证硬件设置**:检查I2C设备的电平规格、电压容限是否与STM32控制器匹配。
3. **软件检查**:通过软件查看I2C设备的状态寄存器,判断初始化是否成功,设备是否准备好通信。
4. **时序和速率调整**:如果发现时序问题,可能需要重新调整I2C的时钟速率设置。
5. **排除冲突**:确保没有多个设备在相同的时间使用相同的地址。
6. **使用调试工具**:利用逻辑分析仪或示波器观察I2C总线的波形,确定是否存在电气特性问题。
7. **逐段测试**:逐一测试每个设备,确保单个设备可以正常工作。
## 5.2 使用调试工具定位问题
### 5.2.1 在线调试工具和配置
在线调试工具对于定位I2C通信问题具有重要作用。以下是使用在线调试工具的一些基本步骤:
- **配置调试环境**:使用支持I2C协议的调试器,如ST-Link,配合集成开发环境(IDE)。
- **连接硬件**:确保调试器与目标STM32硬件正确连接,通常需要SWD接口。
- **启动调试会话**:在IDE中启动调试会话,加载程序到目标板上。
### 5.2.2 调试会话和数据捕获
在调试会话中,可以进行以下操作以捕获和分析数据:
- **设置断点**:在代码的关键位置设置断点,以跟踪程序的执行流程。
- **数据捕获**:在I2C通信过程中,捕获总线上的数据,并进行分析。
- **时序分析**:分析捕获到的时序波形,检查SCL和SDA的上升沿、下降沿是否在规定时间内发生。
## 5.3 预防措施和最佳实践
### 5.3.1 硬件设计的考虑点
在进行硬件设计时,以下几点应该被考虑以预防I2C通信故障:
- **总线长度和负载**:I2C总线长度不宜过长,尽量减小负载电容,以保持信号质量。
- **上拉电阻**:确保在I2C总线上正确放置适当的上拉电阻,以确保通信的稳定性。
- **电源和地线**:I2C设备应尽量靠近STM32控制器,并采用单独的电源和地线,以减少干扰。
### 5.3.2 软件编程的最佳实践
在软件编程方面,以下最佳实践有助于减少I2C通信故障:
- **软件延迟**:在设备配置和初始化之间加入软件延迟,确保设备有足够的时间响应。
- **状态检查**:在进行I2C通信前,检查设备状态和总线状态,确认通信可以顺利进行。
- **异常处理**:在软件中实现异常处理机制,以便在通信异常时能够进行恢复。
通过以上的方法和流程,我们可以系统地诊断和解决STM32 I2C通信过程中可能遇到的问题,从而保证通信的可靠性和稳定性。
# 6. STM32 I2C通信实战案例分析
在前几章中,我们深入了解了STM32 I2C通信的理论基础、配置方法和高级应用。现在,让我们通过一些实际案例来探究STM32 I2C通信在实际项目中的应用和一些高级话题。
## 6.1 实际项目中的I2C应用
在实际的嵌入式项目中,I2C通信协议由于其硬件要求简单、扩展性强等优点,被广泛应用于多种场景。下面将通过两个具体的应用案例来进一步探讨。
### 6.1.1 传感器数据采集系统
在许多物联网项目中,需要通过I2C接口与传感器进行通信,以收集各种环境或物理信息。例如,使用I2C接口的温度传感器和压力传感器。以下是一个典型的I2C通信流程:
1. **初始化I2C接口**:首先需要配置I2C接口,设置其工作模式、时钟速率等。
2. **识别传感器设备**:通过发送设备地址和读写命令来识别连接在I2C总线上的传感器。
3. **配置传感器参数**:根据需要对传感器进行配置,如采样频率、量程等。
4. **读取传感器数据**:定期读取传感器的测量数据,并根据需要进行处理。
```c
/* 伪代码示例 */
I2C_HandleTypeDef hi2c1; // 假设已经初始化了I2C句柄
uint8_t sensor_address = 0xXX; // 传感器地址
uint8_t command = 0xXX; // 传感器配置命令
uint8_t data_buffer[2]; // 存储数据的缓冲区
/* 发送配置命令 */
HAL_I2C_Master_Transmit(&hi2c1, sensor_address, &command, 1, HAL_MAX_DELAY);
/* 读取数据 */
HAL_I2C_Master_Receive(&hi2c1, sensor_address, data_buffer, 2, HAL_MAX_DELAY);
```
### 6.1.2 显示屏接口模块
显示屏模块也经常使用I2C接口进行通信,尤其是在需要显示复杂的图形或文本信息时。使用I2C接口的LCD显示屏可以降低整体硬件的复杂度,并提供足够的带宽来传输显示数据。
1. **初始化显示屏**:通过I2C发送初始化命令,包括显示模式、亮度等。
2. **发送显示数据**:根据显示屏支持的协议发送图像数据或字符编码。
3. **更新显示内容**:根据需要更新屏幕上显示的内容。
在具体实现时,需要参考所选用的显示屏的数据手册,并编写相应的通信协议来控制显示。
## 6.2 I2C通信协议扩展和自定义
在一些特殊的应用场景中,标准I2C通信协议可能无法满足特定需求。因此,对I2C协议的扩展和自定义将是一个值得探索的方向。
### 6.2.1 协议扩展的策略和方法
为了提高通信的效率和功能,我们可以通过以下策略来扩展I2C协议:
- **命令扩展**:在现有命令基础上增加新的控制命令,以执行更多自定义操作。
- **地址扩展**:使用多字节地址,提高寻址能力,从而支持更多从设备。
- **速度扩展**:通过优化软件处理流程或使用硬件辅助手段,提升通信速率。
### 6.2.2 自定义通信协议的实现
实现自定义通信协议需要做好以下几点:
- **定义协议结构**:确定数据包的格式,例如起始信号、地址、命令、数据长度、数据内容、校验码和停止信号等。
- **软件支持**:编写相应的软件代码来实现自定义协议的发送和解析功能。
- **测试验证**:进行充分的测试来验证自定义协议的稳定性和效率。
```c
/* 自定义协议数据包结构伪代码 */
typedef struct {
uint8_t start_flag;
uint8_t device_address;
uint8_t command_code;
uint8_t data_length;
uint8_t data[];
uint8_t checksum;
uint8_t end_flag;
} CustomI2CPacket;
```
## 6.3 跨平台I2C通信解决方案
在多设备、多系统构成的复杂网络中,保证I2C通信的跨平台兼容性变得尤为重要。接下来探讨跨平台I2C通信的一些关键点。
### 6.3.1 跨平台兼容性考虑
在设计跨平台通信方案时,我们需要考虑以下因素:
- **操作系统差异**:不同的操作系统对I2C接口的支持和实现可能有所不同,需要考虑抽象层来统一接口调用。
- **硬件平台多样性**:不同的硬件平台可能有不同的I2C控制器和驱动,需要确保上层协议的通用性。
- **性能优化**:针对不同硬件平台的性能特点进行优化,以获得最佳的通信效率。
### 6.3.2 跨平台通信库的构建和应用
为了实现跨平台的I2C通信,我们构建一个跨平台的通信库,其核心在于提供一套统一的API接口和协议抽象层。以下是构建和应用跨平台通信库的步骤:
1. **定义API接口**:创建一套通用的API接口,用于设备初始化、数据读写、错误处理等。
2. **实现平台适配层**:针对不同的操作系统和硬件平台实现底层的适配代码。
3. **功能扩展和封装**:提供协议栈、流控制、错误检测和恢复等高级功能。
4. **测试和验证**:在各种目标平台上进行全面测试,确保库的稳定性和可靠性。
```c
/* 跨平台通信库API示例 */
void I2C_Init(); // 初始化I2C接口
void I2C_Write(uint8_t*, size_t); // 写操作
void I2C_Read(uint8_t*, size_t); // 读操作
void I2C_Close(); // 关闭I2C接口
/* 平台适配层示例 */
void I2C_Platform_Init() {
#ifdef PLATFORM_WINDOWS
// Windows平台初始化代码
#elif defined(PLATFORM_LINUX)
// Linux平台初始化代码
#endif
}
```
跨平台I2C通信库的构建和应用,不仅提高了开发效率,也使得维护变得更加容易。通过这种方式,开发者可以将精力集中在业务逻辑的实现上,而不必担心底层通信的复杂性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【联发科芯片高级进阶】:AT指令集深度解析,10个实用案例大揭秘

# 摘要
AT指令集作为一种广泛应用于通信设备的命令语言,拥有悠久的历史背景和深厚的技术积累。本文首先对AT指令集进行了概述,详细介绍了其基础语法、结构以及分类和功能,包括网络通信、设备管理、调制解调器控制等。接着,文章深入探讨了AT指令集的高级特性和进阶应用,如自定义指令的创建、错误处理和性能优化等。此外,本文提供了多个实
SDI-12v1.4性能提升秘籍:数据传输效率倍增的5大策略
# 摘要
SDI-12v1.4协议作为智能传感器数据接口的重要标准,为各类数据采集设备提供了高效、可靠的数据通信方式。本文首先概述了SDI-12v1.4协议的基本概念及其在数据传输中的基础工作原理和设备初始化过程。随后,重点介绍了提升SDI-12v1.4数据传输效率的关键技术,包括数据压缩、缓存和缓冲策略以及错误检测与纠正
【维护与保养】:ATV310变频器的日常检查与维护计划

# 摘要
ATV310变频器作为工业自动化中常用的动力控制设备,其性能、稳定性和寿命对生产线的效率至关重要。本文对ATV310变频器进行了全面的概述,包括日常检查、维护计划、故障诊断与处理、性能优化以及长期保养策略。文章强调了对安装环境、电气部件和散热系统进行定期检查的重要性,以及制定预防性维护和应急措施的必要性。此外,通过对常见故障的分析和诊断工具的使用,本文提出了针对性的修复和预防策略。最后,文章探讨了性能优化的途径和长期保
【SDL2图形库速成秘籍】:5分钟带你轻松入门!
# 摘要
SDL2图形库作为一款跨平台的开发工具,在游戏、多媒体以及独立图形界面应用的开发中扮演了重要角色。本论文首先介绍SDL2图形库的快速入门,概述其起源、发展和主要特点,并指导如何在不同操作系统上进行安装和配置。接着,详细阐述了SDL2图形库的基础组件,包括窗口和渲染器的创建、图像和纹理的处理,以及窗
QueryDSL大数据应用:挖掘数据查询的无限可能

# 摘要
QueryDSL作为一种提供类型安全的构建器模式查询语言,已成为Java开发中的一个重要工具,尤其在现代企业级应用中扮演着重要角色。本文从基础介绍到核心功能,再到其在不同数据库中的应用以及在企业级应用中的进阶使用进行详细探讨,同时分析了其在大数据集成和微服
HC-05蓝牙模块连接与通信:一步到位的使用教程

# 摘要
本文详细介绍了HC-05蓝牙模块的基本知识、连接配对过程、编程实现以及高级应用实践。首先,文章对HC-05模块进行了简介,并描述了准备工作。随后,深入探讨了模块的基本连接与配对,硬件连接的基础,配对与连接流程,以及蓝牙通信协议的基础知识。紧接着,文章转入编程实现部分,介绍了编程环境与工具的设置,AT命令配置和实现基本蓝牙通信的方法。最后,探讨了
【数字解调质量保证】:载波恢复与信号质量的深度探讨

# 摘要
数字解调技术是现代通信系统中的核心部分,涉及信号的准确接收和恢复。本文从载波恢复的基础理论出发,探讨了载波恢复的定义、技术原理及其性能评估方法。随后,文章详细分析了信号质量的评估指标,包括信噪比(SNR)、误码率(BER)、调制误差率(MER)以及非线性失真的评估和补偿。实践中,载波恢复在无线通信中的实现及其优化策略是提高信号质量的关键,本文针对不同场
【系统健康监控】:实时监控Windchill 11.0 M030,确保系统稳定运行

# 摘要
系统健康监控是确保企业信息化系统稳定运行的关键环节。本文首先概述了系统健康监控的重要性,接着深入分析了Windchill 11.0 M030监控的理论基础,包括系统监控的必要性、架构概览以及关键性能指标(KPIs)
用例图在ATM系统中的应用:专家级并发处理技巧
# 摘要
本论文探讨了用例图的基础知识及其在ATM系统并发处理中的关键作用。通过分析并发处理的理论基础,包括并发控制、常见模式以及解决并发问题的策略和方法,本文阐述了用例图在设计、并发控制和性能优化中的应用。同时,研究了专家级并发处理技巧,并提供了一系列高级技术,如锁的精细管理、无锁编程及内存模型分析。最后,结合案例研究,展示了用例图如何指导ATM系统的架构调
软件优化的新篇章:分支预测对编程实践的意义
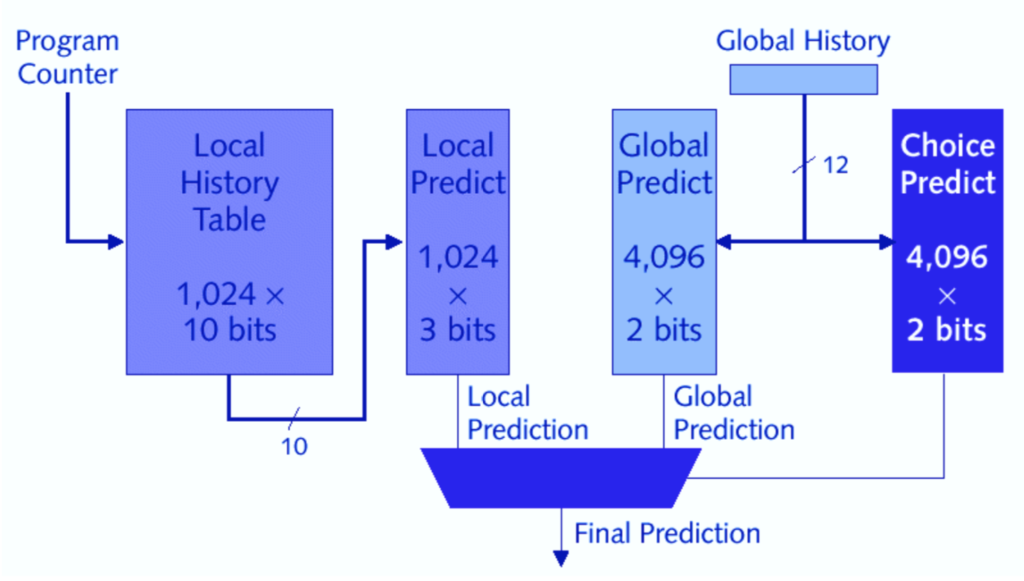
# 摘要
分支预测技术在现代处理器设计中扮演着至关重要的角色,它通过预测程序分支指令的执行路径来减少处理器的等待时间,从而提高系统性能。本文首先介绍了分支预测的概念和原理,并探讨了其在处理器中的应用与发展历程。接着,分析了不同类型的分支预测器设计及其算法,以及它们对处理器性能的具体影响。文章还讨论了分支预测在软件优化中的应用,包括编译器优化策略、不同编程语言的实践案例,以及算法设计时对分支预测的考虑。最后,本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )