MATLAB图像分割:图像分析的基石,掌握图像分割的奥秘
发布时间: 2024-06-10 16:45:14 阅读量: 13 订阅数: 15 
# 1. 图像分割概述**
图像分割是计算机视觉领域中的一项重要技术,其目的是将图像分解为具有不同特征的子区域。它广泛应用于图像分析、目标识别和医疗成像等领域。
图像分割算法通常基于图像的像素信息,通过分析像素之间的相似性和差异来划分图像。常见的图像分割方法包括基于阈值的分割、基于区域的分割和基于边缘的分割。这些算法各有优缺点,具体选择取决于图像的特性和应用场景。
在实际应用中,图像分割面临着许多挑战,例如图像噪声、光照变化和目标边界模糊等。因此,需要不断探索和开发新的图像分割算法和技术,以提高分割精度和鲁棒性。
# 2. 图像分割理论基础
### 2.1 图像分割的概念和分类
#### 2.1.1 图像分割的定义
图像分割是将图像划分为具有不同特征或性质的多个区域或对象的过程。其目的是将图像中感兴趣的对象从背景中分离出来,以便进行后续的分析和处理。
#### 2.1.2 图像分割的分类
图像分割算法可分为以下几类:
- **基于阈值的分割:**将图像像素分为前景和背景,基于像素灰度值或其他特征与给定阈值进行比较。
- **基于区域的分割:**将图像像素分组为具有相似特征(如颜色、纹理)的区域,然后根据区域属性进行分割。
- **基于边缘的分割:**检测图像中像素之间的不连续性(即边缘),然后沿边缘分割图像。
### 2.2 图像分割算法
#### 2.2.1 基于阈值的分割
**Otsu 阈值法:**一种基于类间方差最大化的阈值选择方法。算法步骤如下:
```python
def otsu_threshold(image):
"""
Otsu 阈值法
:param image: 输入图像
:return: 最佳阈值
"""
# 计算图像直方图
hist = cv2.calcHist([image], [0], None, [256], [0, 256])
# 计算每个灰度级的类内方差
within_class_variance = []
for threshold in range(1, 256):
# 将图像分为前景和背景
foreground_pixels = image[image >= threshold]
background_pixels = image[image < threshold]
# 计算前景和背景的均值
foreground_mean = np.mean(foreground_pixels)
background_mean = np.mean(background_pixels)
# 计算类内方差
within_class_variance.append(foreground_mean * (1 - foreground_mean) + background_mean * (1 - background_mean))
# 找到类间方差最大的阈值
best_threshold = np.argmax(within_class_variance) + 1
return best_threshold
```
**参数说明:**
- `image`: 输入图像,灰度图像。
- `threshold`: 阈值,用于将图像分为前景和背景。
**代码逻辑分析:**
1. 计算图像直方图,得到每个灰度级的像素数量。
2. 遍历每个可能的阈值,将图像分为前景和背景。
3. 计算前景和背景的均值。
4. 计算类内方差,表示前景和背景像素与各自均值的差异程度。
5. 找到类间方差最大的阈值,作为最佳阈值。
#### 2.2.2 基于区域的分割
**区域生长法:**从种子点开始,将具有相似特征的相邻像素分组为区域。算法步骤如下:
```python
def region_growing(image, seed_point, threshold):
"""
区域生长法
:param image: 输入图像
:param seed_point: 种子点
:param threshold: 相似性阈值
:return: 分割后的图像
"""
# 初始化区域
region = set()
region.add(seed_point)
# 循环处理种子点周围的像素
while True:
# 获取种子点周围的相邻像素
neighbors = get_neighbors(seed_point)
# 遍历相邻像素
for neighbor in neighbors:
# 计算相邻像素与种子点的相似性
similarity = calculate_similarity(image[seed_point], image[neighbor])
# 如果相似性大于阈值,则将相邻像素加入区域
if similarity > threshold:
region.add(neighbor)
# 如果没有新的像素加入区域,则停止循环
if len(region) == len(previous_region):
break
# 更新种子点为区域中未处理的像素
seed_point = get_next_seed_point(region)
# 返回分割后的图像
return image[list(region)]
```
**参数说明:**
- `image`: 输入图像,灰度图像。
- `seed_point`: 种子点,区域生长的起始点。
- `threshold`: 相似性阈值,用于确定像素是否属于同一区域。
**代码逻辑分析:**
1. 初始化区域,将种子点加入区域。
2. 循环处理种子点周围的像素,计算与种子点的相似性。
3. 如果相似性大于阈值,则将相邻像素加入区域。
4. 如果没有新的像素加入区域,则停止循环。
5. 更新种子点为区域中未处理的像素。
6. 循环直至所有像素都被处理,返回分割后的图像。
#### 2.2.3 基于边缘的分割
**Canny 边缘检测器:**一种基于梯度幅值和方向的边缘检测算法。算法步骤如下:
```python
def canny_edge_detection(image):
"""
Canny 边缘检测器
:param image: 输入图像
:return: 边缘图像
"""
# 高斯滤波降噪
image = cv2.GaussianBlur(image, (5, 5), 0)
# 计算图像梯度
gradients = cv2.Sobel(image, cv2.CV_64F, 1, 0) + cv2.Sobel(image, cv2.CV_64F, 0, 1)
# 计算梯度幅值和方向
gradient_magnitude, gradient_direction = cv2.cartToPolar(gradients[0], gradients[1])
# 非极大值抑制
gradient_magnitude = cv2.dilate(gradient_magnitude, np.ones((3, 3)))
gradient_magnitude = cv2.erode(gradient_magnitude, np.ones((3, 3)))
# 双阈值处理
low_threshold = 0.05 * np.max(gradient_magnitude)
high_threshold = 0.1 * np.max(gradient_magnitude)
edges = np.zeros_like(gradient_magnitude)
edges[gradient_magnitude > high_threshold] = 255
edges[gradient_magnitude <= high_threshold] = 0
edges[gradient_magnitude > low_threshold] = 128
# 滞后阈值处理
for i in range(1, image.shape[0] - 1):
for j in range(1, image.shape[1] - 1):
if edges[i, j] == 128:
if edges[i - 1, j - 1] == 255 or edges[i - 1, j] == 255 or edges[i - 1, j + 1] == 255 or \
edges[i, j - 1] == 255 or edges[i, j + 1] == 255 or edges[i + 1, j - 1] == 255 or \
edges[i + 1, j] == 255 or edges[i + 1, j + 1] == 255:
edges[i, j] = 255
return edges
```
**参数说明:**
- `image`: 输入图像,灰度图像。
**代码逻辑分析:**
1. 高斯滤波降噪。
2. 计算图像梯度。
3. 计算梯度幅值和方向。
4. 非极大值抑制,保留梯度幅值最大的像素。
5. 双阈值处理,将梯度幅值分为三类:强边缘、弱边缘、非边缘。
6. 滞后阈值处理,连接弱边缘和强边缘。
# 3. 图像分割实践应用
### 3.1 医学图像分割
#### 3.1.1 医学图像分割的应用场景
医学图像分割在医疗领域有着广泛的应用,包括:
- **疾病诊断:**通过分割病变区域,可以辅助医生诊断疾病,如肿瘤、骨折等。
- **治疗规划:**分割出感兴趣的解剖结构,为手术、放疗等治疗提供精准的定位和指导。
- **药物开发:**分割出特定组织或器官,用于药物研发和临床试验。
#### 3.1.2 医学图像分割算法
医学图像分割算法主要分为以下几类:
- **基于阈值的分割:**根据图像像素灰度值设置阈值,将图像分割为不同的区域。
- **基于区域的分割:**将图像中的相似区域聚合在一起,形成不同的分割区域。
- **基于边缘的分割:**检测图像中的边缘,并沿边缘分割图像。
### 3.2 遥感图像分割
#### 3.2.1 遥感图像分割的应用场景
遥感图像分割在遥感领域有着重要的应用,包括:
- **土地利用分类:**将遥感图像中的不同土地类型(如森林、农田、城市)分割出来。
- **目标检测:**分割出遥感图像中的特定目标,如建筑物、车辆、船只等。
- **环境监测:**分割出遥感图像中的环境变化区域,如森林砍伐、水体污染等。
#### 3.2.2 遥感图像分割算法
遥感图像分割算法主要分为以下几类:
- **基于阈值的分割:**根据图像像素光谱值设置阈值,将图像分割为不同的区域。
- **基于区域的分割:**将图像中的相似区域聚合在一起,形成不同的分割区域。
- **基于边缘的分割:**检测图像中的边缘,并沿边缘分割图像。
**代码块:**
```python
import numpy as np
import cv2
# 基于阈值的遥感图像分割
image = cv2.imread('remote_sensing_image.tif')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
threshold = 128
segmented_image = np.where(gray > threshold, 255, 0)
```
**逻辑分析:**
该代码块实现了基于阈值的遥感图像分割。首先,读取遥感图像并将其转换为灰度图像。然后,设置阈值,将灰度图像中大于阈值的像素设置为白色(255),小于阈值的像素设置为黑色(0)。
**参数说明:**
- `image`: 输入的遥感图像。
- `gray`: 灰度图像。
- `threshold`: 阈值。
- `segmented_image`: 分割后的图像。
**表格:**
| 算法 | 优点 | 缺点 |
|---|---|---|
| 基于阈值的分割 | 简单、快速 | 对噪声敏感 |
| 基于区域的分割 | 对噪声鲁棒 | 计算复杂 |
| 基于边缘的分割 | 精度高 | 对噪声敏感 |
**mermaid流程图:**
```mermaid
graph LR
subgraph 医学图像分割
A[基于阈值的分割] --> B[基于区域的分割] --> C[基于边缘的分割]
end
subgraph 遥感图像分割
D[基于阈值的分割] --> E[基于区域的分割] --> F[基于边缘的分割]
end
```
# 4.1 图像分割的深度学习方法
### 4.1.1 深度学习在图像分割中的应用
深度学习在图像分割领域取得了显著的进展,主要应用于以下方面:
- **语义分割:**将图像中的每个像素分类为特定的语义类别,例如,道路、建筑物、天空等。
- **实例分割:**将图像中同一类别的不同实例进行分割,例如,分割出图像中所有的人或所有汽车。
- **全景分割:**同时进行语义分割和实例分割,生成一张包含所有对象类别和实例的分割图。
### 4.1.2 深度学习图像分割算法
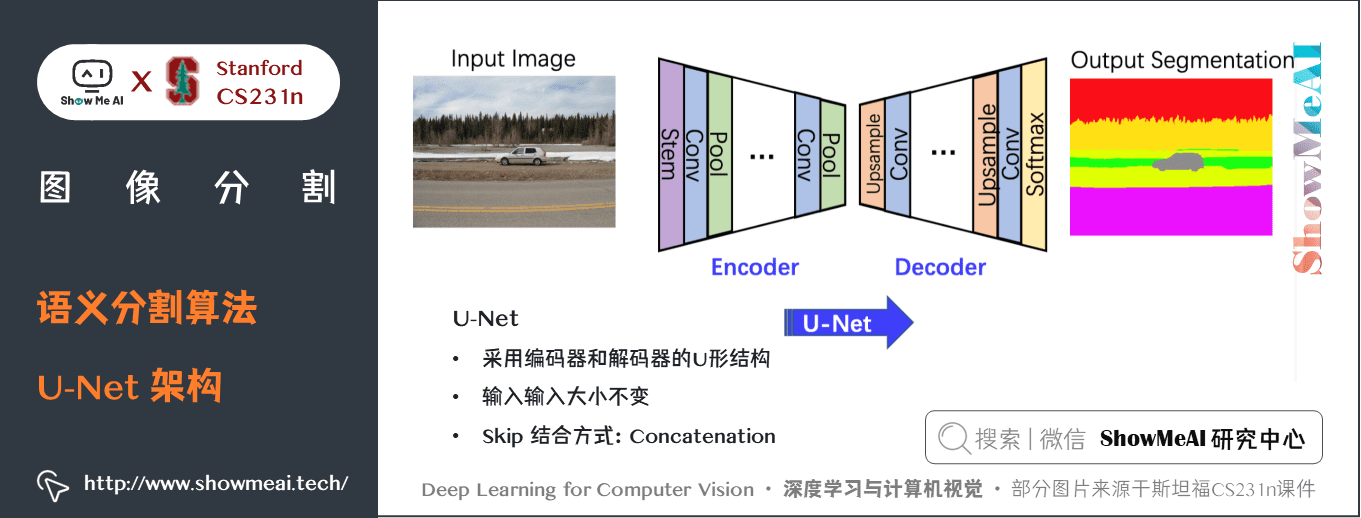
深度学习图像分割算法主要基于卷积神经网络(CNN),其架构通常包括:
- **编码器:**提取图像特征,通常由卷积层和池化层组成。
- **解码器:**将编码器提取的特征上采样,恢复图像的空间分辨率。
- **跳跃连接:**将编码器不同层级的特征与解码器相应层级的特征连接,融合低级和高级特征。
常用的深度学习图像分割算法包括:
- **U-Net:**一种经典的语义分割网络,采用对称的编码器-解码器结构。
- **DeepLab:**一种高性能的语义分割网络,采用空洞卷积扩大感受野。
- **Mask R-CNN:**一种实例分割网络,结合了目标检测和语义分割。
**代码块:**
```python
import tensorflow as tf
# 定义 U-Net 模型
class UNet(tf.keras.Model):
def __init__(self):
super(UNet, self).__init__()
# 编码器
self.encoder = tf.keras.Sequential([
tf.keras.layers.Conv2D(32, (3, 3), activation='relu', padding='same'),
tf.keras.layers.MaxPooling2D((2, 2)),
tf.keras.layers.Conv2D(64, (3, 3), activation='relu', padding='same'),
tf.keras.layers.MaxPooling2D((2, 2)),
tf.keras.layers.Conv2D(128, (3, 3), activation='relu', padding='same'),
tf.keras.layers.MaxPooling2D((2, 2)),
tf.keras.layers.Conv2D(256, (3, 3), activation='relu', padding='same'),
tf.keras.layers.MaxPooling2D((2, 2)),
])
# 解码器
self.decoder = tf.keras.Sequential([
tf.keras.layers.UpSampling2D((2, 2)),
tf.keras.layers.Conv2D(128, (3, 3), activation='relu', padding='same'),
tf.keras.layers.UpSampling2D((2, 2)),
tf.keras.layers.Conv2D(64, (3, 3), activation='relu', padding='same'),
tf.keras.layers.UpSampling2D((2, 2)),
tf.keras.layers.Conv2D(32, (3, 3), activation='relu', padding='same'),
tf.keras.layers.UpSampling2D((2, 2)),
tf.keras.layers.Conv2D(1, (1, 1), activation='sigmoid', padding='same'),
])
def call(self, inputs):
# 编码器提取特征
x = self.encoder(inputs)
# 解码器恢复空间分辨率
x = self.decoder(x)
return x
```
**代码逻辑逐行解读:**
- `__init__` 方法定义了 U-Net 模型的结构,包括编码器和解码器。
- 编码器由卷积层和池化层组成,逐层提取图像特征。
- 解码器由上采样层和卷积层组成,逐层恢复图像的空间分辨率。
- `call` 方法实现了模型的前向传播,将输入图像编码为特征图,然后解码为分割图。
## 4.2 图像分割的优化算法
### 4.2.1 图像分割的优化目标
图像分割的优化目标通常是基于分割质量的度量,例如:
- **交叉熵损失:**衡量分割图和真实分割图之间的差异。
- **Dice 系数:**衡量分割图和真实分割图之间的重叠程度。
- **Hausdorff 距离:**衡量分割图和真实分割图之间的最大距离。
### 4.2.2 图像分割优化算法
图像分割优化算法旨在最小化优化目标,常用的算法包括:
- **梯度下降:**一种迭代算法,沿梯度方向更新模型参数。
- **Adam:**一种自适应梯度下降算法,调整学习率以加速收敛。
- **RMSProp:**一种自适应梯度下降算法,通过保持梯度平方和的移动平均值来平滑梯度。
**表格:图像分割优化算法比较**
| 算法 | 优点 | 缺点 |
|---|---|---|
| 梯度下降 | 简单易实现 | 收敛速度慢 |
| Adam | 收敛速度快 | 可能过度优化 |
| RMSProp | 平滑梯度,防止震荡 | 收敛速度可能较慢 |
**Mermaid 流程图:图像分割优化算法流程**
```mermaid
graph LR
subgraph 梯度下降
A[初始化模型参数] --> B[计算梯度] --> C[更新模型参数]
end
subgraph Adam
A[初始化模型参数] --> B[计算梯度] --> C[更新学习率] --> D[更新模型参数]
end
subgraph RMSProp
A[初始化模型参数] --> B[计算梯度] --> C[更新梯度平方和] --> D[更新模型参数]
end
```
**流程图解读:**
- 梯度下降算法:从初始化模型参数开始,迭代计算梯度并更新模型参数。
- Adam 算法:在梯度下降的基础上,增加了学习率更新步骤,加速收敛。
- RMSProp 算法:通过平滑梯度,防止优化过程中的震荡。
# 5. 图像分割评价指标**
图像分割评价指标是衡量图像分割算法性能的重要标准,可用于评估分割结果的准确性、鲁棒性和有效性。本章将对图像分割评价指标进行详细介绍,包括分类、选取原则和具体应用。
## 5.1 图像分割评价指标的分类
图像分割评价指标可分为两大类:基于像素的评价指标和基于区域的评价指标。
### 5.1.1 基于像素的评价指标
基于像素的评价指标直接比较分割结果与真实分割结果中的每个像素,计算像素分类的准确性。常见指标包括:
- **像素精度 (PA)**:分割结果中正确分类的像素数量与所有像素数量的比值。
- **平均像素精度 (MPA)**:所有类别的像素精度的平均值。
- **平均交并比 (mIoU)**:所有类别的交并比的平均值。交并比表示分割结果与真实分割结果的重叠程度。
- **像素错误率 (PER)**:分割结果中错误分类的像素数量与所有像素数量的比值。
### 5.1.2 基于区域的评价指标
基于区域的评价指标将分割结果与真实分割结果中的每个区域进行比较,评估区域分割的准确性。常见指标包括:
- **区域精度 (RA)**:分割结果中正确分割的区域数量与所有区域数量的比值。
- **平均区域精度 (mRA)**:所有类别的区域精度的平均值。
- **区域错误率 (RER)**:分割结果中错误分割的区域数量与所有区域数量的比值。
## 5.2 图像分割评价指标的选取
图像分割评价指标的选取应根据具体应用场景和算法特性进行考虑。以下是一些选取原则:
- **任务相关性**:指标应与图像分割任务的目标相符。例如,对于二值分割任务,像素精度更合适;对于多类分割任务,mIoU更合适。
- **鲁棒性**:指标应对噪声和异常值具有鲁棒性,避免因极端情况影响评价结果。
- **计算效率**:指标的计算应具有较高的效率,避免对大规模图像分割造成过大的计算负担。
## 5.3 具体应用
图像分割评价指标在实际应用中非常重要。以下是一些具体应用场景:
- **算法比较**:通过不同评价指标比较不同图像分割算法的性能,选择最优算法。
- **参数优化**:利用评价指标优化图像分割算法的参数,提高分割精度。
- **分割结果评估**:评价图像分割结果的准确性,为后续处理提供参考。
**代码示例**
```python
import numpy as np
from sklearn.metrics import accuracy_score, jaccard_score
def pixel_accuracy(y_true, y_pred):
"""计算像素精度。
参数:
y_true (array): 真实分割结果。
y_pred (array): 预测分割结果。
返回:
像素精度。
"""
return accuracy_score(y_true.flatten(), y_pred.flatten())
def mean_iou(y_true, y_pred):
"""计算平均交并比。
参数:
y_true (array): 真实分割结果。
y_pred (array): 预测分割结果。
返回:
平均交并比。
"""
num_classes = np.max(y_true) + 1
ious = []
for i in range(num_classes):
intersection = np.logical_and(y_true == i, y_pred == i).sum()
union = np.logical_or(y_true == i, y_pred == i).sum()
ious.append(intersection / union)
return np.mean(ious)
```
# 6. MATLAB图像分割工具箱
### 6.1 MATLAB图像分割工具箱概述
#### 6.1.1 工具箱的功能
MATLAB图像分割工具箱是一个功能强大的工具箱,提供了一系列图像分割算法和函数,用于处理各种图像分割任务。工具箱包含用于图像分割的广泛方法,包括:
- 基于阈值的分割
- 基于区域的分割
- 基于边缘的分割
- 基于深度学习的分割
#### 6.1.2 工具箱的使用
MATLAB图像分割工具箱易于使用,提供直观的函数和交互式界面。用户可以通过以下步骤使用工具箱:
1. 导入图像:使用`imread`函数导入图像。
2. 选择分割方法:使用适当的函数选择所需的分割方法,例如`imbinarize`用于基于阈值的分割,`regionprops`用于基于区域的分割。
3. 应用分割算法:应用所选算法对图像进行分割,例如`imbinarize(image, threshold)`用于基于阈值的分割。
4. 可视化分割结果:使用`imshow`函数可视化分割结果。
### 6.2 MATLAB图像分割工具箱实践应用
#### 6.2.1 基于阈值的分割示例
```
% 导入图像
image = imread('image.jpg');
% 转换为灰度图像
grayImage = rgb2gray(image);
% 设置阈值
threshold = 120;
% 基于阈值的分割
segmentedImage = imbinarize(grayImage, threshold);
% 可视化分割结果
imshow(segmentedImage);
```
#### 6.2.2 基于区域的分割示例
```
% 导入图像
image = imread('image.jpg');
% 转换为灰度图像
grayImage = rgb2gray(image);
% 区域分割
segmentedImage = regionprops(grayImage, 'BoundingBox', 'Area');
% 提取分割区域的边界框
boundingBoxes = [segmentedImage.BoundingBox];
% 可视化分割结果
imshow(image);
hold on;
for i = 1:length(boundingBoxes)
rectangle('Position', boundingBoxes(i, :), 'EdgeColor', 'r');
end
hold off;
```
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏《MATLAB图像处理实战指南》是一份全面的指南,涵盖了图像处理的各个方面,从基础知识到高级技术。它提供了深入的见解,揭示了MATLAB图像处理的秘密武器,并提供了掌握图像增强、分割、特征提取、分类、目标检测、配准、超分辨率和GAN等技术的实用指南。该专栏还探讨了图像处理的幕后机制、数据结构、滤波器、变换、颜色空间、形态学操作、小波变换、傅里叶变换、图像融合和图像分割算法,为读者提供了全面了解图像处理的工具和技术。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Python字典常见问题与解决方案:快速解决字典难题
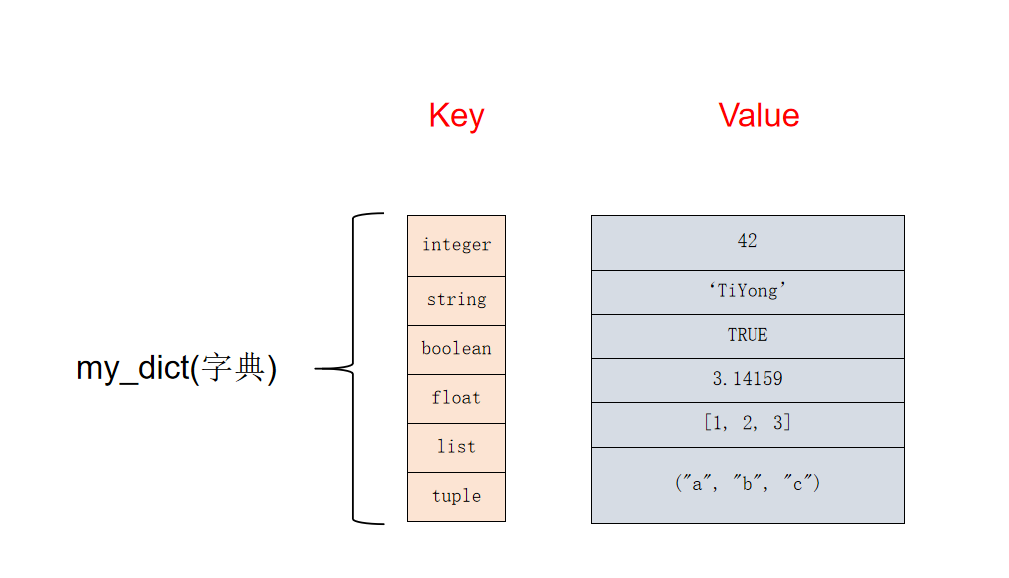
# 1. Python字典简介
Python字典是一种无序的、可变的键值对集合。它使用键来唯一标识每个值,并且键和值都可以是任何数据类型。字典在Python中广泛用于存储和组织数据,因为它们提供了快速且高效的查找和插入操作。
在Python中,字典使用大括号 `{}` 来表示。键和值由冒号 `:` 分隔,键值对由逗号 `,` 分隔。例如,以下代码创建了一个包含键值对的字典:
```py
Python Excel数据分析:统计建模与预测,揭示数据的未来趋势
# 1. Python Excel数据分析概述**
**1.1 Python Excel数据分析的优势**
Python是一种强大的编程语言,具有丰富的库和工具,使其成为Excel数据分析的理想选择。通过使用Python,数据分析人员可以自动化任务、处理大量数据并创建交互式可视化。
**1.2 Python Excel数据分析库**
Python map函数在代码部署中的利器:自动化流程,提升运维效率

# 1. Python map 函数简介**
map 函数是一个内置的高阶函数,用于将一个函数应用于可迭代对象的每个元素,并返回一个包含转换后元素的新可迭代对象。其语法为:
```python
map(function, iterable)
```
其中,`function` 是要应用的函数,`iterable` 是要遍历的可迭代对象。map 函数通
【实战演练】python个人作品集网站

# 2.1 HTML和CSS基础
### 2.1.1 HTML元素和结构
HTML(超文本标记语言)是用于创建网页内容的标记语言。它由一系列元素组成,这些元素定义了网页的结构和内容。HTML元素使用尖括号(<>)表示,例如 `<html>`、`<body>` 和 `<p>`。
每个HTML元素都有一个开始标签和一个结束标签,它们之间包含元素的内容。例如,一个段落元素由 `<p>` 开始标签
OODB数据建模:设计灵活且可扩展的数据库,应对数据变化,游刃有余

# 1. OODB数据建模概述
对象-面向数据库(OODB)数据建模是一种数据建模方法,它将现实世界的实体和关系映射到数据库中。与关系数据建模不同,OODB数据建模将数据表示为对象,这些对象具有属性、方法和引用。这种方法更接近现实世界的表示,从而简化了复杂数据结构的建模。
OODB数据建模提供了几个关键优势,包括:
* **对象标识和引用完整性
numpy安装与性能优化:优化安装后的numpy性能

# 1. NumPy简介**
NumPy(Numerical Python)是一个用于科学计算的Python库。它提供了一个强大的N维数组对象,以及用于数组操作的高
Python列表操作的扩展之道:使用append()函数创建自定义列表类

# 1. Python列表操作基础
Python列表是一种可变有序的数据结构,用于存储同类型元素的集合。列表操作是Py
Python脚本调用与区块链:探索脚本调用在区块链技术中的潜力,让区块链技术更强大

# 1. Python脚本与区块链简介**
**1.1 Python脚本简介**
Python是一种高级编程语言,以其简洁、易读和广泛的库而闻名。它广泛用于各种领域,包括数据科学、机器学习和Web开发。
**1.2 区块链简介**
区块链是一种分布式账本技术,用于记录交易并防止篡改。它由一系列称为区块的数据块组成,每个区块都包含一组交易和指向前一个区块的哈希值。区块链的去中心化和不可变性使其
【实战演练】综合自动化测试项目:单元测试、功能测试、集成测试、性能测试的综合应用

# 2.1 单元测试框架的选择和使用
单元测试框架是用于编写、执行和报告单元测试的软件库。在选择单元测试框架时,需要考虑以下因素:
* **语言支持:**框架必须支持你正在使用的编程语言。
* **易用性:**框架应该易于学习和使用,以便团队成员可以轻松编写和维护测试用例。
* **功能性:**框架应该提供广泛的功能,包括断言、模拟和存根。
* **报告:**框架应该生成清
【实战演练】使用selenium进行网页自动化
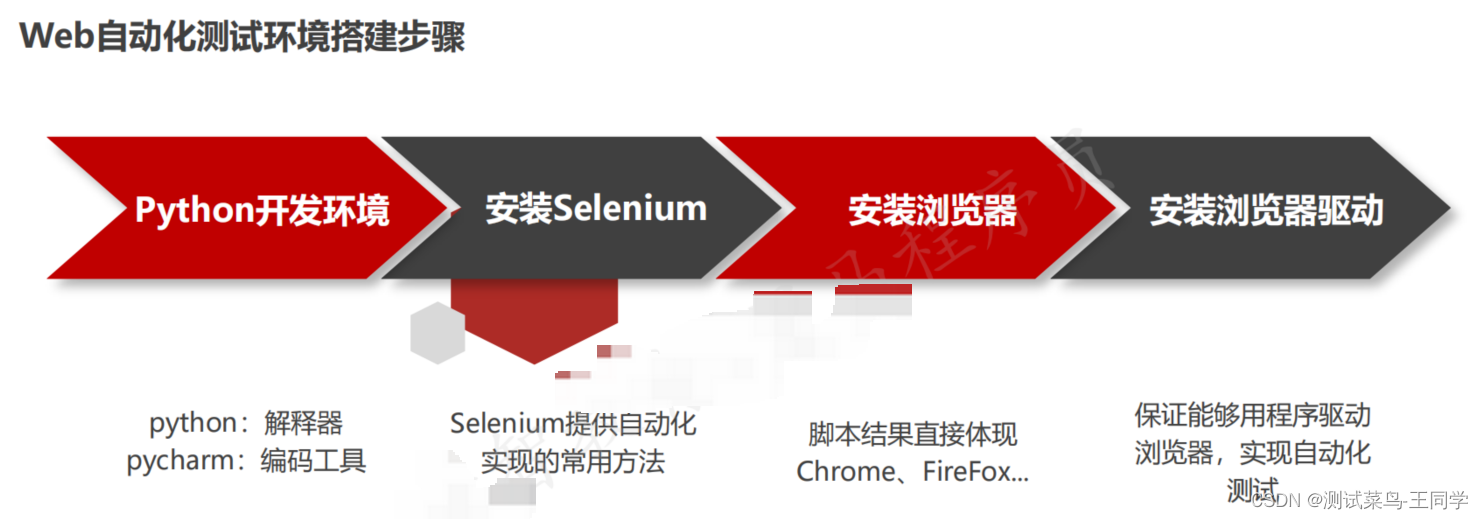
# 2.1 定位元素
定位元素是 Selenium 自动化测试的基础,它允许我们与网页上的元素进行交互。Selenium 提供了多种定位方式,每种方式都有其独特的优点和缺点。
### 2.1.1 常用定位方式
**ID 定位:**使用元素的唯一 ID 属性。是最可靠的定位方式,但要求元素必须有唯一的 ID。
**Name 定位:**使用元素的 name 属性。比 ID 定位效率低,因为一个
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )