【Python强化学习性能提升秘籍】:掌握模型优化,实现算法飞跃
发布时间: 2024-08-31 18:39:24 阅读量: 140 订阅数: 58 
# 1. 强化学习的基本原理与Python实现
## 1.1 强化学习概述
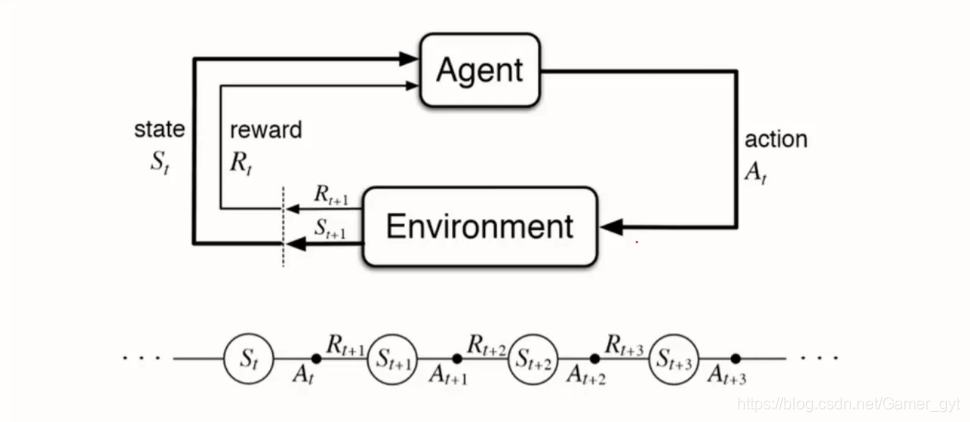
强化学习(Reinforcement Learning, RL)是一种通过与环境的互动来学习行为策略的机器学习范式。在这种范式下,智能体(agent)通过尝试和错误来改善其在特定环境中的表现。这种方法的核心在于奖励(reward)机制,智能体采取行动以最大化累积奖励。
```python
# 伪代码示例:智能体与环境的交互循环
while not done:
action = agent.act(observation) # 智能体根据观察选择动作
observation, reward, done = env.step(action) # 执行动作,环境反馈新的观察、奖励和任务完成标志
agent.learn(observation, action, reward) # 智能体根据结果进行学习
```
## 1.2 强化学习与监督学习、无监督学习的对比
强化学习与监督学习和无监督学习的主要区别在于其学习信号是延迟的和不完整的。在监督学习中,数据包含标签,智能体通过预测正确标签来学习;无监督学习中没有标签,智能体通过数据的内在结构学习;而在强化学习中,智能体只能通过奖励信号来推断哪些行为是好的。
## 1.3 Python在强化学习中的作用
Python因具有丰富的数据科学和机器学习库,成为实现强化学习的首选语言。其清晰的语法、大量的开源库(如TensorFlow、PyTorch、OpenAI Gym等)使得构建和测试强化学习模型变得简便。此外,Python的社区支持和跨平台兼容性进一步增强了其在这一领域的应用。在本文中,我们将使用Python来展示强化学习的各种基本原理和高级技术。
```python
# 导入强化学习环境中常用的库
import gym
import numpy as np
```
下一章节将详细探讨强化学习的理论基础,以及如何使用Python建立强化学习模型。
# 2. Python强化学习模型构建基础
在第二章中,我们将深入探索构建强化学习模型的基础知识。我们会涵盖理论框架、常用的Python库,以及如何设置环境和智能体进行初步学习。
### 2.1 强化学习模型的理论框架
强化学习的理论框架建立在一系列核心概念之上。理解这些概念是构建有效强化学习模型的前提。
#### 2.1.1 马尔可夫决策过程(MDP)基础
在强化学习中,马尔可夫决策过程(MDP)是描述决策问题的标准方式。MDP 包括状态(states)、动作(actions)、转移概率(transition probabilities)、奖励(rewards)以及折扣因子(discount factor)。
- 状态(States):环境的每一个配置,可能是一个游戏的快照或者一个机器人在某个时刻的位置和速度。
- 动作(Actions):智能体可以执行的每一个动作,比如向左移动或选择某个策略。
- 转移概率(Transition Probabilities):在给定当前状态和执行动作的情况下,环境转移到下一个状态的概率。
- 奖励(Rewards):智能体在采取某个动作后,从环境中获得的即时反馈。
- 折扣因子(Discount Factor):用于衡量即时奖励与未来奖励相对重要性的系数。
MDP 能够通过其状态转移模型和奖励函数,描述从任一状态出发,通过一系列动作选择而产生的序列化决策过程。智能体的目标是最大化其在一段时间内的总奖励,通常通过折扣奖励来实现。
#### 2.1.2 策略(Policy)和价值函数(Value Function)概念
策略是智能体根据当前状态来选择动作的规则,可以是确定性的(给定状态,确定性地选择动作)或随机性的(给定状态,动作是按照概率选择的)。
价值函数衡量的是在给定状态下,遵循特定策略所能获得的长期奖励。分为状态价值函数(V(s))和动作价值函数(Q(s, a)),分别用于评估处于特定状态或在特定状态下采取特定动作的期望收益。
理解MDP和价值函数是设计和分析强化学习模型的基石。
### 2.2 Python中的强化学习库概览
Python拥有多种强大的库,可以让我们轻松地实现和测试强化学习算法。这些库提供了MDP模型和训练算法的实现,允许研究者和工程师快速构建和实验强化学习系统。
#### 2.2.1 强化学习常用库介绍
- **TensorFlow & Keras**:虽然主要用于深度学习,但也可用于强化学习,尤其是深度强化学习。
- **PyTorch**:与TensorFlow类似,PyTorch也是一个深度学习框架,广泛用于深度强化学习。
- **Gym**:由OpenAI开发,Gym是一个库,用于开发和比较强化学习算法。它提供了许多预定义的环境,如Atari游戏和机器人仿真。
- **RLlib**:由Ray框架提供,RLlib是一个针对大规模强化学习的库,适合于分布式学习。
#### 2.2.2 库的选择与对比分析
选择合适的库取决于项目的需求和开发者的熟悉度。比如,如果项目需要深度强化学习,选择TensorFlow或PyTorch作为后端是更合适的选择。如果项目需要快速原型验证和使用标准强化学习环境,那么Gym是一个很好的起点。
- **TensorFlow & Keras**:适合深度学习背景的开发者,TensorFlow提供了较为底层的控制,而Keras作为其高层API,易于使用。
- **PyTorch**:越来越多的强化学习研究使用PyTorch,特别是对动态计算图更青睐的场景。
- **Gym**:适合初学者入门,许多强化学习教程和例子都以Gym为背景,易于上手。
- **RLlib**:适合大规模应用和分布式训练,如果需要处理多机多GPU的训练环境,RLlib则显得更加得心应手。
### 2.3 建立第一个强化学习环境与智能体
构建强化学习模型的关键步骤之一是建立环境和智能体。环境是智能体学习和互动的场所,而智能体则是学习和执行动作的主体。
#### 2.3.1 环境的创建与配置
使用Gym库来创建一个简单的环境,比如CartPole问题。CartPole是一个经典问题,目标是保持平衡移动的杆子,使用以下步骤:
```python
import gym
# 创建环境实例
env = gym.make("CartPole-v0")
```
之后可以进行环境的配置,比如渲染环境、重置环境到初始状态等:
```python
# 重置环境
obs = env.reset()
done = False
# 渲染环境
env.render()
# 进行多个步骤的交互
while not done:
action = env.action_space.sample() # 随机选择一个动作
obs, reward, done, info = env.step(action)
# 更新环境
```
#### 2.3.2 智能体的初始化与训练基础
智能体需要能够根据环境状态来选择动作。在强化学习中,这通常通过策略网络实现。例如,使用Q-learning方法,智能体通过学习一个Q表或Q网络来做出决策:
```python
import random
import numpy as np
# Q-learning 参数
learning_rate = 0.01
discount_factor = 0.9
exploration_rate = 1.0
max_exploration_rate = 1.0
min_exploration_rate = 0.02
exploration_decay_rate = 0.005
episodes = 1000
# Q表初始化
q_table = np.zeros((env.observation_space.n, env.action_space.n))
# 训练智能体
for episode in range(episodes):
# 观察初始状态
state = env.reset()
done = False
while not done:
if random.uniform(0, 1) < exploration_rate:
action = env.action_space.sa
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏提供了一系列全面的指南,帮助您掌握 Python 强化学习算法的实现和应用。从基础理论到高级技术,您将学习如何:
* 实施强化学习算法,如 Q 学习、策略梯度和深度确定性策略梯度。
* 优化算法性能,掌握模型优化技巧和超参数调优。
* 平衡探索和利用,制定有效的学习策略。
* 选择适合您项目的强化学习框架,包括 TensorFlow、PyTorch 和 Keras。
* 调试和测试算法,确保可靠性和准确性。
* 设计有效的奖励函数,这是算法优化的关键因素。
* 构建复杂的学习系统,探索强化学习的更高级应用。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Tomcat根目录优化指南】:一文掌握部署效率与性能提升的终极策略
# 摘要
本文对Tomcat服务器的部署优化进行了全面的研究,从理论基础到实践应用,涵盖了目录结构、配置文件、部署策略、集群环境等关键领域。文章深入分析了Tomcat根目录的构成、性能影响及其优化方法,并探讨了应用程序部署时的性能考量。特别在集群环境下,本文提出了共享资源管理、负载均衡及故障转移的优化策略。通过案例研究与性能调优实例,本文展示了如何在高并发网站和大型电商平台中应用优化技术,并强调了持续监
UG Block安全与兼容性:一文掌握保护与跨平台运行技巧
# 摘要
UG Block作为一种技术方案,在多个领域中具有广泛应用。本文系统地介绍了UG Block的基本概念、安全机制、运行技巧、高级安全特性以及安全监控与管理。首先,概述了UG Block的基本概念和安全策略,然后深入探讨了在不同平台下的运行技巧,包括跨平台兼容性原理和性能优化。接着,分析了UG Block的高级安全特性,如加密技术、访问控制与身份验证以及安全审计与合规性。此外,还讨论了安全监控与
TIMESAT自动化部署秘籍:维护监控系统的高效之道
# 摘要
Timesat作为一个先进的自动化部署工具,在软件开发生命周期中扮演着关键角色,尤其在维护部署流程的效率和可靠性方面。本文首先概述了Timesat的功能及其在自动化部署中的应用,随后详细探讨了Timesat的工作原理、数据流处理机制以及自动化部署的基本概念和流程。通过实战技巧章节,文章揭示了Timesat配置、环境优化、脚本编写与执行的具体技巧,以及集成和监控的设置方法。在深入应用章节,介绍了Timesat的高级配置选
【SUSE Linux系统优化】:新手必学的15个最佳实践和安全设置
# 摘要
本文详细探讨了SUSE Linux系统的优化方法,涵盖了从基础系统配置到高级性能调优的各个方面。首先,概述了系统优化的重要性,随后详细介绍了基础系统优化实践,包括软件包管理、系统升级、服务管理以及性能监控工具的应用。接着,深入到存储与文件系统的优化,讲解了磁盘分区、挂载点管理、文件系统调整以及LVM逻辑卷的创建与管理。文章还强调了网络性能和安全优化,探讨了网络配置、防火墙设置、
【私密性】:揭秘行业内幕:如何将TI-LMP91000模块完美集成到任何系统

# 摘要
本论文全面介绍并深入分析了TI-
网络安全升级:GSP TBC在数据保护中的革命性应用

# 摘要
本论文旨在探讨网络安全与数据保护领域的GSP TBC技术。首先介绍了GSP TBC技术的起源与发展,以及其理论基础,包括数据加密、混淆技术和数据完整性校验机制等关键技术。随后,文章分析了GSP TBC在金融、电子商务和医疗保健等行业的实践应用,并探讨了在这些领域中保护金融交
深度解读NAFNet:图像去模糊技术的创新突破
# 摘要
图像去模糊技术是数字图像处理领域的重要课题,对于改善视觉效果和提升图像质量具有重要意义。本论文首先概述了图像去模糊技术的发展历程和当前的应用现状,随后深入探讨了NAFNet作为一项创新的图像去模糊技术,包括其数学原理、核心架构以及与传统去模糊技术的比较。NAFNet的核心架构和设计理念在提升图像清晰度和
【系统分析与设计】:单头线号检测技术的深度剖析
# 摘要
单头线号检测技术是一种专门用于自动化生产线的高效检测方法,它可以快速准确地识别产品上的线号,提高生产的效率和质量。本文首先概述了单头线号检测技术的基本理论基础,包括线号检测的原理与技术路线、单头线号检测系统的组成,以及影响检测性能的各种因素。接着,文章深入探讨了单头线号检测技术在工业中的实际应用,包括其在自动化生产线中的实施案例和性能评估,以及针对该技术的优化策
【算法设计高级应用】:电子科技大学李洪伟教授的复杂算法解题模板

# 摘要
算法设计与问题求解是计算机科学与工程的核心内容,本文首先介绍了算法设计的基础知识,随后深入探讨了数据结构与算法效率之间的关系,并分析了分治法、动态规划、贪心算法等高级算法设计模式的原理和应用。在特定领域应用章节中,本文详细论述了图论问题、网络流问题以及字符串处理和模式匹配问题的算法解决方案和优化策略。最后,通过实战演练与案例分析,将理论知识应用于解决复杂算法问题,同时对算法效率进行评
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )