系统辨识案例研究:现代控制理论从理论到实际的探索之旅
发布时间: 2024-12-14 07:13:33 阅读量: 7 订阅数: 7 
参考资源链接:[现代控制理论课后习题完整解答](https://wenku.csdn.net/doc/6412b5d2be7fbd1778d44848?spm=1055.2635.3001.10343)
# 1. 系统辨识与现代控制理论概述
## 1.1 系统辨识和控制理论简介
系统辨识是现代控制理论中一个关键的组成部分,它涉及到从观测数据中提取系统模型的过程。这在工程实践中非常重要,因为它允许我们理解和预测系统的行为,为控制策略的设计提供理论基础。现代控制理论,相对于传统控制理论,强调的是状态空间方法,这使得我们可以处理更复杂的问题,比如多变量系统和非线性系统。
## 1.2 系统辨识的目的和应用
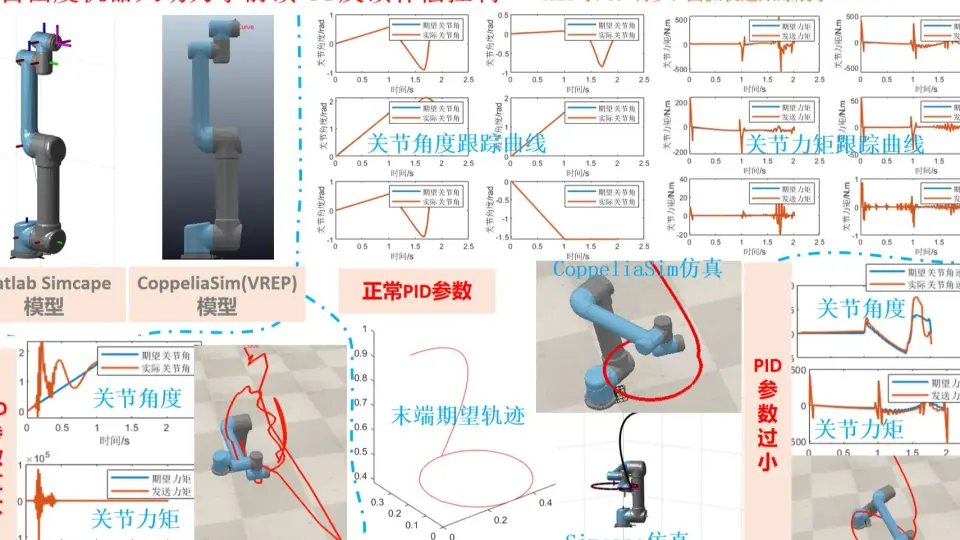
系统辨识的目标是构建一个能够准确描述实际系统行为的数学模型。这样的模型可以应用于多个领域,包括工业控制、机器人技术、航空航天工程、生物医学工程等。通过系统辨识,我们能够获得必要的知识来设计有效的控制策略,从而优化性能,确保系统的稳定性和可靠性。
## 1.3 现代控制理论的重要性
现代控制理论为处理传统理论所不能应对的问题提供了工具和方法。这些方法包括最优控制、鲁棒控制、自适应控制和智能控制,它们关注的是提高系统性能,同时减少对模型精确度的依赖。在不断变化的环境和要求下,现代控制理论使控制系统能够更加灵活和适应性强。
# 2. 系统建模基础
### 2.1 数学模型在系统辨识中的作用
在系统辨识的过程中,数学模型扮演着核心的角色,因为它提供了一种将现实世界问题抽象化、量化的方式。通过数学模型,复杂的动态系统可以被简化成一组方程,从而使得分析和预测变得更加可行。
#### 2.1.1 线性与非线性系统的建模方法
线性系统和非线性系统的建模方法存在着明显的差异。线性系统通常可以使用差分方程或传递函数来描述,因为它们遵循叠加原理和齐次原理。而后者则需要更复杂的数学工具,如非线性微分方程或特定于问题的数学结构,以正确地捕获系统行为。
**线性系统建模**
对于线性系统,最常用的数学模型是传递函数和状态空间表示。传递函数定义了输入与输出之间的关系,而状态空间模型则提供了系统内部状态的动态变化描述。
**非线性系统建模**
非线性系统没有通用的建模方法,但常用的方法包括泰勒级数展开、描述函数分析、李氏变换等。选择哪种方法往往取决于系统表现出的非线性特征及其复杂性。
**代码示例:线性系统模型**
```python
from scipy.signal import lti, bode
import matplotlib.pyplot as plt
# 定义线性系统的传递函数
numerator = [1]
denominator = [1, 3, 2, 0]
sys = lti(numerator, denominator)
# 绘制系统的波特图
w, mag, phase = bode(sys)
plt.show()
```
以上代码使用了`scipy.signal`模块来定义一个简单的二阶线性系统,并绘制了它的波特图。`numerator`和`denominator`数组分别定义了系统传递函数的分子和分母多项式。
**非线性系统模型的Python实现**
```python
import numpy as np
import matplotlib.pyplot as plt
# 定义非线性系统的动态
def nonlinear_system_dynamics(state, time, params):
# 示例非线性函数
return -state * params[0] + params[1] * np.sin(time)
# 初始化参数
state = [1.0] # 系统的初始状态
params = [0.1, 0.5] # 系统参数
time = np.linspace(0, 10, 100) # 时间向量
# 积分求解非线性系统的状态变化
states = []
for t in time:
state = nonlinear_system_dynamics(state, t, params)
states.append(state)
# 绘制状态随时间变化的图像
plt.plot(time, states)
plt.xlabel('Time')
plt.ylabel('State')
plt.title('Nonlinear System Dynamics')
plt.show()
```
在这个代码块中,我们定义了一个非线性系统模型,并使用了显式欧拉方法来近似模拟系统状态随时间的变化。通过这种方式,我们可以对非线性系统的动态行为有一个直观的理解。
#### 2.1.2 时间序列分析基础
时间序列分析是研究系统输入和输出数据随时间变化的统计方法。它在系统辨识中非常重要,因为通过时间序列,我们可以从历史数据中提取出重要的动态信息,这对于建立模型和预测未来的系统行为至关重要。
**时间序列的特性**
时间序列分析涉及几个关键特性,包括趋势、季节性、周期性和随机性。理解这些特性有助于选择合适的建模技术。
**时间序列建模方法**
常用的时间序列建模方法包括自回归模型(AR)、移动平均模型(MA)和自回归移动平均模型(ARMA),以及它们的扩展ARIMA模型。
**代码示例:AR模型**
```python
import statsmodels.api as sm
# 生成一个AR(1)模型的示例数据
np.random.seed(42)
y = np.zeros(100)
y[0] = np.random.normal()
phi = 0.8
for i in range(1, 100):
y[i] = phi * y[i-1] + np.random.normal()
# 使用AR模型拟合数据
model = sm.tsa.AR(y)
fitted_model = model.fit(maxlag=1, disp=0)
print(fitted_model.summary())
```
在这段代码中,我们生成了一个简单的自回归过程,并使用`statsmodels`库中的AR模型对其进行了拟合。输出的模型摘要提供了拟合的参数和统计信息,这有助于我们评估模型的质量。
### 2.2 系统辨识的主要方法论
系统辨识涉及到从实际观察到的数据中提取系统模型的过程。这个过程可以通过各种方法来完成,通常分为参数估计方法、非参数估计方法和状态空间模型。
#### 2.2.1 参数估计方法
参数估计方法试图确定系统数学模型中未知参数的值。这些方法假设系统的结构是已知的,只有参数需要通过输入输出数据来估计。
**经典辨识方法**
经典的方法包括最小二乘法(OLS)、工具变量法和极大似然估计法。这些方法在估计线性系统参数方面有很好的理论支持。
**代码示例:最小二乘法**
```python
from sklearn.linear_model import LinearRegression
# 示例数据
X = np.array([[1], [2], [3], [4]])
y = np.array([2, 4, 6, 8])
# 最小二乘法拟合线性模型
model = LinearRegression()
model.fit(X, y)
print('Intercept:', model.intercept_)
print('Slope:', model.coef_[0])
```
在这段Python代码中,我们使用`sklearn`库中的`LinearRegression`模型来找到一组数据的最佳拟合线。输出的截距和斜率代表了线性方程的参数。
#### 2.2.2 非参数估计方法
非参数估计方法不要求对系统模型有先验的结构假设。这种方法侧重于从数据中直接提取模式,而不是确定参数的具体值。
**核密度估计**
非参数方法之一是核密度估计,它通过核函数平滑处理数据来估计随机变量的概率密度函数。
**K近邻方法**
另一种常见的非参数方法是K近邻方法(K-NN)。虽然K-NN主要用于分类问题,但也可以用来估计系统行为。
**代码示例:核密度估计**
```python
from sklearn.neighbors import KernelDensity
import numpy as np
# 创建一些样本数据
data = np.random.randn(100, 2)
# 使用高斯核进行核密度估计
kde = KernelDensity(kernel='gaussian')
kde.fit(data)
# 生成新的数据点进行估计
X_new = np.array([[0, 0], [0.5, 0.5]])
log_density = kde.score_samples(X_new)
print('Estimated density at [0, 0]:', np.exp(log_density[0]))
print('Estimated density at [0.5, 0.5]:', np.exp(log_density[1]))
```
在上述代码中,我们使用`sklearn`库中的`KernelDensity`类来进行核密度估计。给定一个新点,我们计算其估计的概率密度。
#### 2.2.3 状态空间模型与状态估计
状态空间模型提供了一种以系统内部状态为基础进行建模的方式。这些模型由状态方程和输出方程组成,分别描述了系统状态如何随时间演化以及如何从状态产生输出。
**卡尔曼滤波**
状态空间模型中一个著名的状态估计方法是卡尔曼滤波。卡尔曼滤波器是一种递归滤波器,它可以在存在噪声的情况下对系统的动态状态进行估计。
**扩展卡尔曼滤波**
对于非线性系统,扩展卡尔曼滤波(EKF)提供了一种解决方案,它通过泰勒级数展开来近似非线性函数,从而使得卡尔曼滤波算法适用。
**代码示例:扩展卡尔曼滤波器**
```python
from numpy import asarray, zeros, eye, dot, transpose
class ExtendedKalmanFilter:
def __init__(self, x0, P, Q, R, h, H, Jacobian, f):
self.x = x0
self.P = P
self.Q = Q
self.R = R
self.h = h
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到《现代控制理论》专栏,这是一份权威指南,旨在帮助您掌握控制理论的复杂世界。从入门概念到高级技术,我们的专家作者团队将为您提供深入的见解和实用的技巧。
本专栏涵盖了现代控制理论的各个方面,包括系统建模、控制器设计、系统辨识、状态估计和滤波技术。您将了解优化算法、鲁棒性设计和多变量控制的最新进展。此外,我们还提供了案例研究和应用实例,展示了现代控制理论在实际中的力量。
无论您是初学者还是经验丰富的专业人士,我们的专栏都会为您提供宝贵的见解和资源,帮助您提升您的控制理论知识和技能。加入我们,踏上探索现代控制理论的精彩旅程,并发现其在优化系统性能、提高稳定性和实现抗干扰控制方面的强大潜力。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
深入理解海明码:实践中的错误更正机制完全手册

参考资源链接:[海明码与码距:概念、例子及纠错能力分析](https://wenku.csdn.net/doc/5qhk39kpxi?spm=1055.2635.3001.10343)
【工业自动化中的应用】:冲压与送料机构在自动化生产线中的关键角色

参考资源链接:[板料冲制机冲压与送料机构设计解析](https://wenku.csdn.net/doc/5hfp00n04s?spm=1055.2635.3001.10343)
# 1. 工业自动化基础与关键组件
工业自动化是一个涉及多学科的复杂领域,它通过自动
高效PCB板边设计:Cadence Allegro Outline绘制的5大高级技巧

参考资源链接:[cadence allegro里如何绘制板边outline](https://wenku.csdn.net/doc/6412b621be7fbd1778d459e4?spm=1055.2635.3001.10343)
# 1. Cadence Allegro概述及其在PCB设计中的地位
## 1.1 电子设计自动化与
ARINC664 Part 7技术深度剖析:揭秘航空通信协议的高效应用(全解析)
参考资源链接:[ARINC664第7部分:中文版航空电子全双工交换式以太网规范](https://wenku.csdn.net/doc/6412b79ebe7fbd1778d4af0c?spm=1055.2635.3001.10343)
# 1. ARINC664 Part 7技术概述
ARINC664 Part 7技术作为航空电子通信的国际标
【FIBOCOM FM150-AE 系列硬件优化技巧】:设备性能飞跃的秘诀
参考资源链接:[FIBOCOM FM150-AE系列硬件指南:5G通信模组详解](https://wenku.csdn.net/doc/5a6i74w47q?spm=1055.2635.3001.10343)
# 1. FIBOCOM FM150-AE系列硬件概述
FIBOCOM作为业界领先的通信模块提供商,其FM150-AE系列凭借优秀的性能与稳定性,在物联网和无线通信领域备受瞩目。本章将带领读者走进FM150-AE系列的世界,深入探讨其硬件构成、设计理念以及应用场景。
## 1.1 硬件设计与应用范围
FIBOCOM FM150-AE系列的设计初衷是为了满足工业级无线通信的需求。该系
【.NET Framework 3.5 SP1终极指南】:全面提升你的安装、配置与故障排除技能
参考资源链接:[离线安装 .NET Framework 3.5 SP1 完整包及语言包教程](https://wenku.csdn.net/doc/4z3yuygoyi?spm=1055.2635.3001.10343)
# 1. .NET Framework 3.5 SP1概述
.NET Framework 3.5 SP1是微软推出的一个重要版本,它在
西门子PLC编程比较:STL与梯形图的优势及应用分析

参考资源链接:[西门子STL编程手册:语句表指令详解](https://wenku.csdn.net/doc/1dgcsrqbai?spm=1055.2635.3001.10343)
# 1. 西门子PLC编程概述
在自动化工业领域,可编程逻辑控制器(PLC)是核心控制设备之一,而西门子作为该领域的佼佼者,其PLC产品广泛应用于各种复杂的控制系统中。在本章中,我们将简要介绍PLC的概念,以及西门子PLC编程
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )