CAN总线通信中的软硬件协同设计
发布时间: 2024-02-21 05:06:35 阅读量: 31 订阅数: 35 
# 1. CAN总线通信概述
CAN(Controller Area Network)总线是一种广泛应用于实时控制领域的串行通信协议,具有高可靠性、高实时性和高抗干扰能力的特点。CAN总线通信在汽车电子、工业控制、航空航天等领域得到广泛应用。
## 1.1 CAN总线概述
CAN总线由Bosch公司开发,最初应用于汽车电子控制系统。它采用串行通信方式,在工业控制领域具有广泛的应用。
## 1.2 CAN总线通信特点
CAN总线通信具有高实时性、高可靠性、抗干扰能力强等特点,支持多主机并行通信,可以同时传输控制信息和数据信息。
## 1.3 CAN总线应用领域
CAN总线在汽车电子、工业控制、航空航天等领域有着广泛的应用。在汽车电子中,用于发动机控制单元、车身控制单元等模块之间的数据通信;在工业控制中,用于PLC控制系统、传感器网络等设备间的通信。
## 1.4 CAN总线通信优势
CAN总线通信具有良好的抗干扰能力、高可靠性、实时性强等优势,适合于对通信质量要求较高的场景,如实时控制系统、工业自动化系统等。
# 2. CAN总线通信协议基础
CAN总线通信协议作为一种现代工业界常用的通信方式,其基本协议结构对于实现可靠的数据通信至关重要。本章将重点介绍CAN总线通信协议的基础知识,包括CAN帧结构、CAN标识符、CAN通信速率以及CAN错误处理机制。
### 2.1 CAN帧结构
CAN通信基于数据帧结构进行信息传递,一个完整的CAN数据帧包括以下几个部分:
- **帧起始符**:指示帧的开始,包含11个固定位的“0”。
- **帧类型**:标识数据帧或远程帧,数据帧用“0”,远程帧用“1”。
- **标识符**:11位或29位的标识符,用于确定消息优先级及内容。
- **控制字段**:包括数据长度码(DLC)等信息。
- **数据域**:包含数据信息的部分,长度根据DLC字段确定。
- **CRC校验码**:用于检测数据传输过程中是否出错的校验码。
- **ACK槽**:表示其他节点是否正确接收到该帧的槽位。
- **结束符**:标志帧的结束。
一个标准帧的CAN帧结构如下:
```python
# Python示例代码
class CanFrame:
def __init__(self, identifier, data):
self.identifier = identifier
self.data = data
self.dlc = len(data)
def to_bytes(self):
frame = bytearray()
frame.append(0b0) # 帧起始符
frame.append(0b0) # 数据帧类型
frame.extend(self.identifier.to_bytes(4, 'big')) # 标识符
frame.append(self.dlc) # 数据长度码
frame.extend(self.data) # 数据域
# CRC校验码和ACK槽省略
frame.extend([0, 0]) # 结束符
return frame
# 创建一个CAN数据帧
data = [0x12, 0x34, 0x56, 0x78]
can_frame = CanFrame(0x123, data)
can_bytes = can_frame.to_bytes()
print(can_bytes)
```
### 2.2 CAN标识符
CAN标识符用于表示消息的优先级和内容,根据其位数的不同可分为11位标识符(CAN 2.0A)和29位标识符(CAN 2.0B)。其中,11位标识符的优先级按照Bit31最高、Bit0最低的顺序排序,而29位标识符的优先级规则更为复杂,需要按照特定的算法计算。
```java
// Java示例代码
public class CanIdentifier {
private int identifier;
public CanIdentifier(int identifier) {
this.identifier = identifier;
}
// 检查是否为标准帧
public boolean isStandardFrame() {
return (identifier >> 29) == 0;
}
// 获取优先级
public int priority() {
return isStandardFrame() ? (identifier >> 21) & 0x7F : (identifier >> 23) & 0x1FFF;
}
// 获取PDU
public int pdu() {
return identifier & 0xFFFF;
}
public static void main(String[] args) {
CanIdentifier canId = new CanIdentifier(0x18DAF110);
System.out.println("Priority: " + canId.priority());
System.out.println("PDU: " + canId.pdu());
}
}
```
### 2.3 CAN通信速率
CAN总线可以支持不同的通信速率,常见的包括1Mbps、500kbps、250kbps等。选择适当的通信速率取决于系统的需求,高速率能提供更快的数据传输速度,但也增加了系统的成本和复杂性。
```go
// Go示例代码
package main
import "fmt"
// 定义常用的CAN通信速率
const (
CAN_1Mpbs = 1000000
CAN_500kbps = 500000
CAN_250kbps = 250000
)
func main() {
fmt.Println("CAN通信速率:1Mbps -", CAN_1Mpbs, "bps")
fmt.Println("CAN通信速率:500kbps -", CAN_500kbps, "bps")
fmt.Println("CAN通信速率:250kbps -", CAN_250kbps, "bps")
}
```
### 2.4 CAN错误处理机制
CAN总线通信在传输过程中可能会出现各种错误,如位错误、帧错误、CRC错误等。为了保证通信的可靠性,CAN协议中包含了一套完善的错误处理机制,主要包括以下几种:
- **位错误处理**:通过错误标记位进行错误通知和处理。
- **帧错误处理**:检测帧格式错误,并可通过错误回退尝试重新发送。
- **CRC错误处理**:使用CRC校验码来检测数据传输中的错误,发现错误时可请求重发。
以上是CAN总线通信协议的基础知识,了解这些内容对于理解CAN总线的工作原理和应用至关重要。在实际应用中,需要根据具体情况选择合适的CAN帧结构、标识符、通信速率以及错误处理机制,以确保系统的稳定性和可靠性。
# 3. CAN总线硬件设计
CAN总线硬件设计是建立在CAN通信协议基础上的重要一环,其合理性直接关系到整个通信系统的稳定性和可靠性。本章主要介绍CAN总线硬件设计的相关内容,包括CAN控制器硬件设计、CAN收发器选择与设计、CAN总线网络拓扑与布线设计以及CAN总线抑制器与终端电阻设计。
#### 3.1 CAN控制器硬件设计
CAN控制器是CAN通信系统中的重要组成部分,负责处理CAN帧的发送和接收,以及错误处理等功能。在进行CAN控制器硬件设计时,需要考虑以下几个方面:
- 选择合适的CAN控制器芯片,如Microchip的MCP2515或者Texas Instruments的MSP430等。
- 确定CAN控制器的工作模式,包括是否支持高速、低速或自动速率调节。
- 进行外围电路设计,包括时钟电路、复位电路、电源电路等。
```java
// 以MCP2515为例的CAN控制器硬件设计示例代码
public class MCP2515Controller {
private int
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
这个专栏致力于探讨CAN总线通信在现代技术领域中的重要性及应用。从基础概念解析、到在汽车电子系统中的具体应用,再到数据帧格式详解以及速率与波特率设置等方面进行深入分析,涵盖了CAN总线通信技术的方方面面。此外,文章还对硬件过滤、软件滤波技术、错误处理机制、网络管理协议、故障诊断与排查等关键技术进行了详细讨论,同时探讨了软硬件协同设计、加密与安全机制、与其他通信协议的集成、远程诊断与维护、功耗优化与电源管理等内容。通过本专栏的阅读,读者可以全面了解CAN总线通信技术的各个方面,为实际应用提供全面的指导与技术支持。
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
RHEL 8.3系统性能提升秘籍:必备优化技巧,让系统跑得更快!
# 摘要
本文详细探讨了RHEL 8.3系统性能优化的方法与技巧,覆盖从理论基础到实践应用的各个方面。通过深入理解系统性能指标、掌握性能分析工具和方法论,本文指导读者进行系统配置优化实践,包括内核参数调整、磁盘I/O及网络性能的调整。同时,文章还探讨了资源管理技巧,例如CPU资源管理、内存管理策略和进程控制限制。此外,本文介绍了自动化监控与调优的工具和脚
【MV-L101097-00-88E1512深度剖析】:掌握核心性能指标与优化秘诀

# 摘要
本文详细探讨了核心性能指标的理论基础与实际应用,深入分析了性能测试与分析方法论,包括不同性能测试的类型、性能数据收集与分析技术以及性能瓶颈的识别与诊断。通过对计算资源、网络和数据库性能指标的研究,本文提供了系统级别和应用程序的性能优化策略,并强调了持续性能监控与自动化优化的重要性。文章还通过案例研究展示了性能优化的实践,探讨了未来性能优化技术和趋势,旨在为性能优化提
51单片机PID算法进阶指南:掌握高级应用与稳定鲁棒性分析
# 摘要
本文综合探讨了PID控制理论的基础知识及其在51单片机上的实现,进一步探讨了PID算法的高级应用和性能提升策略,并通过实践案例验证了理论与应用的有效性。首先介绍了PID控制的基本原理,包括比例环节(P)、积分环节(I)、微分环节(D)的定义及其在控制算法中的作用。其次,本文讨论了PID参数的调整方法,包括手动调整法、自动调整法和实时在线调整策略。在51单片机上实现PID算法时,本文详细阐述了算法流程
【组态王通信实例精析】:掌握S7-200 Smart PLC数据采集与故障解决技巧

# 摘要
随着工业自动化水平的提升,组态王与S7-200 Smart PLC在数据采集和通信方面发挥着日益重要的作用。本文首先概述了组态王通信的基础知识,详细介绍了S7-200 Smart PLC的数据采集机制,包括其工作原理、
C51单片机开发新手必看:Visual Studio 2019环境搭建实战教程
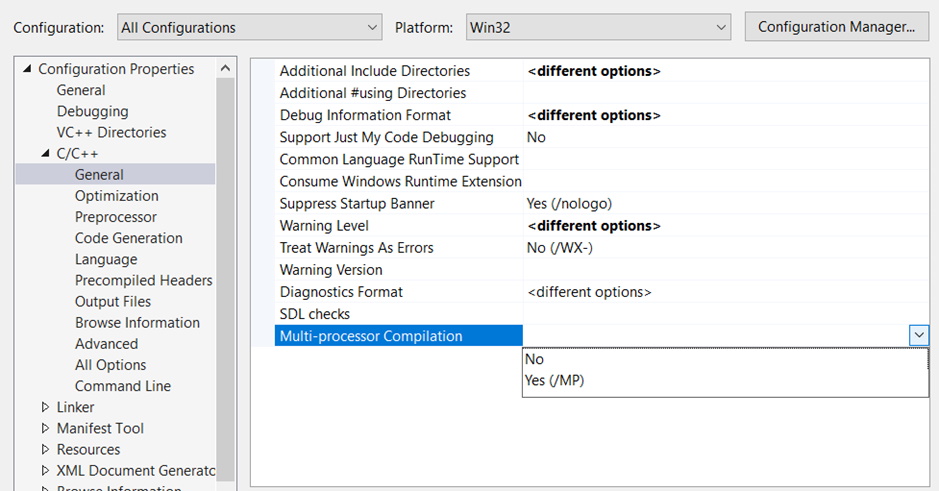
# 摘要
本文详细介绍了C51单片机的开发流程,涵盖了从开发环境搭建到项目管理与发布的全过程。首先概述了C51单片机开发的基础知识和Visual Studio 2019环境的配置,包括安装Visual Studio 2019及其C51开发插件,创建项目并设置编译器选项。接着,文章深入探讨了C51的基础语法和编程实践,提供了硬件操作
无人机开发黄金法则】:基于DJI Mobile SDK构建高效项目实战指南

# 摘要
本文全面介绍DJI无人机开发的各个方面,从DJI Mobile SDK的核心组件解读到无人机控制与数据采集的实战应用,再到高级功能的开发与集成,最后探讨项目实施、优化策略以及未来的技术趋势。本文详细阐述了SDK的安装、配置以及架构组件,深入探讨了实时飞行控制、视频流与图像处理、数据记录与分析等关键技术和应用场景。同时,本文还探讨了自定义飞行模式、第三方集成
MicroPython实战速成:3步构建领先的IoT项目
# 摘要
本文系统地介绍了MicroPython的特性和应用场景,从基础语法结构和内置函数库开始,逐步深入到与硬件交互、构建IoT项目实战,再到项目优化与安全性考虑,以及高级应用与未来展望。MicroPython作为一种适用于微控制器的精简Python实现,提供了便于硬件编程和物联网应用开发的语法和库。文章不仅涵盖了硬件控制
【提升Flutter用户体验】:键盘事件处理与输入框交互优化
# 摘要
本文旨在深入探讨Flutter框架下的键盘事件处理机制,以及如何优化输入框交互和提升用户体验。首先介绍了Flutter的基本概念,包括其框架概述和Widget使用方法,然后详细分析了键盘事件的生命周期和处理技巧,以及输入框的优化策略。文章还讨论了如何通过动态键盘行为优化和界面协调来改善用户体验,并通过实际案例分析和代码实践,展示了解决键盘交互
项目策划到执行:华为IPD阶段二至五的核心策略及实践
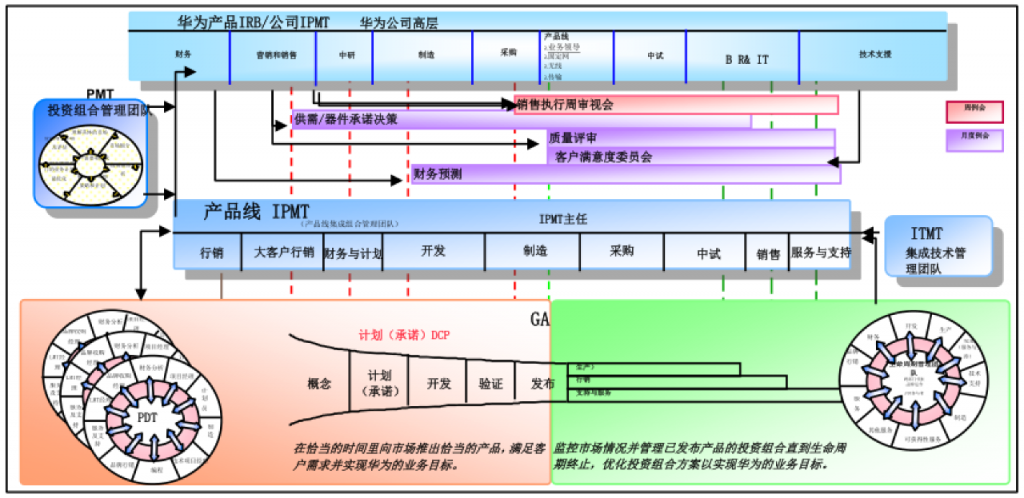
# 摘要
华为的集成产品开发(IPD)是一套系统化的理论框架,旨在通过跨功能团队合作,强化产品从策划到上市的全过程。本论文详细探讨了华为IPD理论框架下的各阶段核心策略与实践方法,包括项目策划阶段的市场调研、目标设定、项目计划与资源配置、风险评估及应对策略。在概念验证阶段,着重讨论了技术验证、原型开发、用户反馈收集及市场测试分析。产品开发阶段的管理策略和实践包括模块化设计、
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )