CAN总线通信速率与波特率设置
发布时间: 2024-02-21 04:57:42 阅读量: 71 订阅数: 21 
# 1. 第一章 CAN总线通信速率的概述
## 1.1 CAN总线简介
控制器局域网络(Controller Area Network,CAN)是一种广泛应用于实时控制领域的串行通信协议。它具有高度可靠性、实时性强和抗干扰能力强的特点,被广泛应用于汽车、工业控制、航空航天等领域。
## 1.2 CAN总线通信速率的重要性
CAN总线通信速率决定了数据传输的效率和实时性,对于实时控制系统来说尤为重要。合理的通信速率可以确保数据及时传输,提高系统的稳定性和可靠性。
## 1.3 CAN总线通信速率的影响因素
CAN总线通信速率受到物理层特性、网络拓扑结构、电缆质量等因素的影响。在设计和应用CAN总线时,需要充分考虑这些影响因素,并进行合理的速率设置。
接下来,我们将深入探讨CAN总线通信速率的标准、分类、计算方法以及设置流程。
# 2. 第二章 CAN总线通信速率的标准与分类
CAN总线通信速率是指在CAN总线通信中,数据传输的速率,通常以波特率(Baud Rate)来表示,波特率是每秒钟传输的比特(bit)数目。根据不同的标准和分类,CAN总线通信速率可以有不同的取值范围和应用场景。
### 2.1 CAN总线通信速率的标准
CAN总线通信速率的标准主要包括两个:标准CAN和CAN FD。标准CAN最大支持1Mbps的波特率,而CAN FD(Flexible Data Rate)可以实现更高的通信速率,最高可达到8Mbps。
### 2.2 CAN总线通信速率的分类
根据通信速率的不同,CAN总线通信可以分为低速CAN(LS-CAN)、高速CAN(HS-CAN)、高速带宽CAN(HSB-CAN)等类型。其中,低速CAN通常波特率在125Kbps以下,适用于对通信速率要求不高的应用场景;高速CAN通常波特率在500Kbps到1Mbps之间,适用于对通信速率要求较高的场景;高速带宽CAN适用于对数据传输带宽要求较高的场景,波特率在1Mbps以上。
### 2.3 标准与分类对应的应用场景
不同的CAN总线通信标准和分类适用于不同的应用场景。低速CAN通常用于汽车电子控制单元(ECU)之间的通信,如车身控制、座椅控制等;高速CAN常用于发动机控制、刹车系统、传感器控制等;而高速带宽CAN则常用于需要大量数据传输的应用,如高级驾驶辅助系统(ADAS)等。
在实际应用中,选择合适的CAN总线通信速率标准和分类,可以更好地满足系统的通信需求,提高通信效率和可靠性。
# 3. 第三章 CAN总线通信速率的计算方法
在CAN总线通信中,波特率的设置对通信质量至关重要。本章将介绍CAN总线通信速率的计算方法,包括基本波特率计算公式、同步时间段与传输时间段的计算以及采样点的设定方法。
#### 3.1 基本波特率计算公式
CAN总线通信的波特率通常使用以下计算公式:
```python
def calculate_baud_rate(propagation_delay, bit_time, sample_point):
t_prop = propagation_delay
t_bit = bit_time
sp = sample_point
t_sjw = 1 # 时间跳变宽度
t_sync = 1 # 同步时间段
# 采样点在传输时间段的占比
t_sample = sp * t_bit
t_ph1 = (1 - t_sample) * t_bit # 相位1时间段
t_ph2 = t_sample * t_bit # 相位2时间段
baud_rate = 1 / ((t_ph1 + t_ph2 + t_prop + t_sync) * 2)
return baud_rate
```
#### 3.2 同步时间段与传输时间段的计算
在CAN总线通信中,同步时间段和传输时间段是根据采样点的设定来确定的。可以根据采样点来计算各个时间段的具体长度。
#### 3.3 采样点的设定方法
通常情况下,CAN总线的标准采样点为87.5%。通过调整采样点的大小,可以影响数据的采样时机和准确性。在实际应用中,需要根据具体的通信需求进行合理的采样点设置。
以上是关于CAN总线通信速率的计算方法的介绍,合理设置波特率和采样点是保证通信质量的关键。
# 4. 第四章 CAN总线通信速率的设置流程
在CAN总线通信中,正确设置通信速率是至关重要的。本章将详细介绍CAN总线通信速率的设置流程,包括CAN总线通信控制器寄存器的设置、CAN控制器的初始化流程以及波特率设置的配置与调试技巧。
#### 4.1 CAN总线通信控制器寄存器的设置
CAN总线通信控制器寄存器的设置是CAN通信速率设置的第一步。在这一步中,我们需要设置通信控制器的相关参数,包括波特率寄存器的设定、同步时间段与传输时间段的配置等。
以下是一个简单的Python示例代码,用于设置CAN总线通信控制器寄存器的相关参数:
```python
import can
# 初始化CAN总线连接
bus = can.interface.Bus(channel='can0', bustype='socketcan')
# 设置波特率寄存器
bus.set_bitrate(5
```
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
这个专栏致力于探讨CAN总线通信在现代技术领域中的重要性及应用。从基础概念解析、到在汽车电子系统中的具体应用,再到数据帧格式详解以及速率与波特率设置等方面进行深入分析,涵盖了CAN总线通信技术的方方面面。此外,文章还对硬件过滤、软件滤波技术、错误处理机制、网络管理协议、故障诊断与排查等关键技术进行了详细讨论,同时探讨了软硬件协同设计、加密与安全机制、与其他通信协议的集成、远程诊断与维护、功耗优化与电源管理等内容。通过本专栏的阅读,读者可以全面了解CAN总线通信技术的各个方面,为实际应用提供全面的指导与技术支持。
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【实战演练】时间序列预测项目:天气预测-数据预处理、LSTM构建、模型训练与评估

# 1. 时间序列预测概述**
时间序列预测是指根据历史数据预测未来值。它广泛应用于金融、天气、交通等领域,具有重要的实际意义。时间序列数据通常具有时序性、趋势性和季节性等特点,对其进行预测需要考虑这些特性。
# 2. 数据预处理
### 2.1 数据收集和清洗
#### 2.1.1 数据源介绍
时间序列预测模型的构建需要可靠且高质量的数据作为基础。数据源的选择至关重要,它将影响模型的准确性和可靠性。常见的时序数据源包括:
【实战演练】使用Docker与Kubernetes进行容器化管理
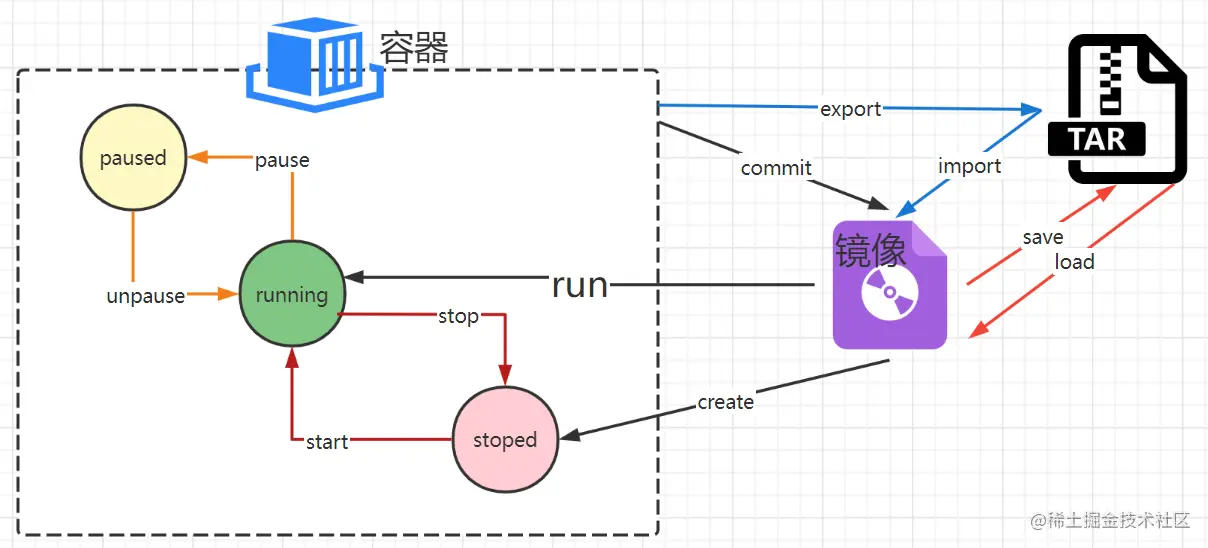
# 2.1 Docker容器的基本概念和架构
Docker容器是一种轻量级的虚拟化技术,它允许在隔离的环境中运行应用程序。与传统虚拟机不同,Docker容器共享主机内核,从而减少了资源开销并提高了性能。
Docker容器基于镜像构建。镜像是包含应用程序及
【实战演练】虚拟宠物:开发一个虚拟宠物游戏,重点在于状态管理和交互设计。
# 2.1 虚拟宠物的状态模型
### 2.1.1 宠物的基本属性
虚拟宠物的状态由一系列基本属性决定,这些属性描述了宠物的当前状态,包括:
- **生命值 (HP)**:宠物的健康状况,当 HP 为 0 时,宠物死亡。
- **饥饿值 (Hunger)**:宠物的饥饿程度,当 Hunger 为 0 时,宠物会饿死。
- **口渴
【实战演练】通过强化学习优化能源管理系统实战
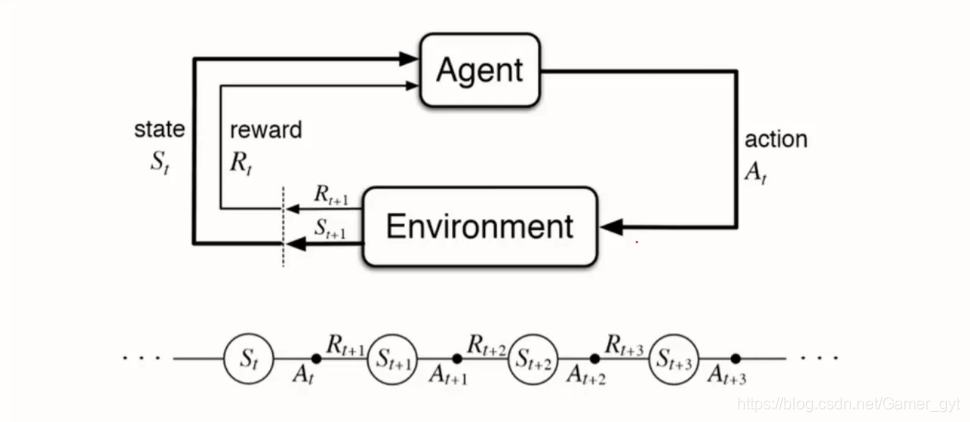
# 2.1 强化学习的基本原理
强化学习是一种机器学习方法,它允许智能体通过与环境的交互来学习最佳行为。在强化学习中,智能体通过执行动作与环境交互,并根据其行为的
【实战演练】深度学习在计算机视觉中的综合应用项目

# 1. 计算机视觉概述**
计算机视觉(CV)是人工智能(AI)的一个分支,它使计算机能够“看到”和理解图像和视频。CV 旨在赋予计算机人类视觉系统的能力,包括图像识别、对象检测、场景理解和视频分析。
CV 在广泛的应用中发挥着至关重要的作用,包括医疗诊断、自动驾驶、安防监控和工业自动化。它通过从视觉数据中提取有意义的信息,为计算机提供环境感知能力,从而实现这些应用。
# 2.1 卷积
【实战演练】综合案例:数据科学项目中的高等数学应用

# 1. 数据科学项目中的高等数学基础**
高等数学在数据科学中扮演着至关重要的角色,为数据分析、建模和优化提供了坚实的理论基础。本节将概述数据科学
【实战演练】python云数据库部署:从选择到实施
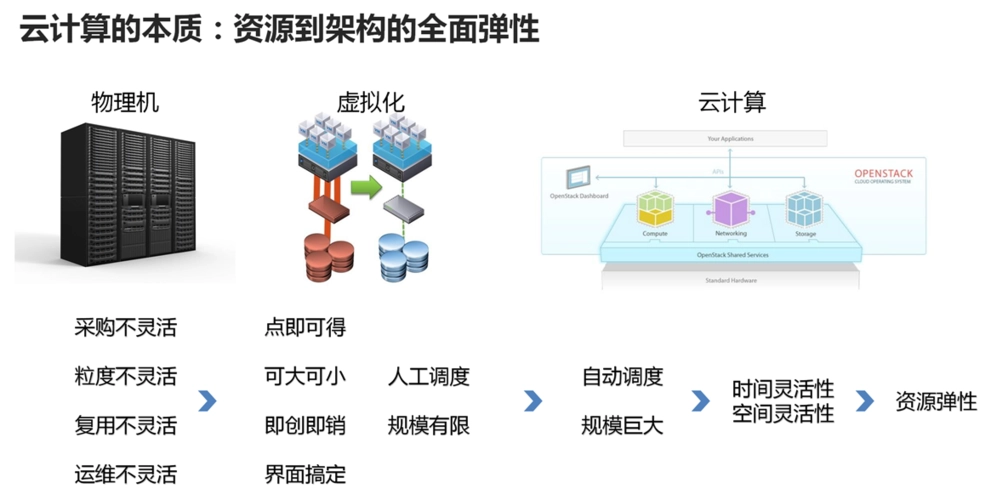
# 2.1 云数据库类型及优劣对比
**关系型数据库(RDBMS)**
* **优点:**
* 结构化数据存储,支持复杂查询和事务
* 广泛使用,成熟且稳定
* **缺点:**
* 扩展性受限,垂直扩展成本高
* 不适合处理非结构化或半结构化数据
**非关系型数据库(NoSQL)**
* **优点:**
* 可扩展性强,水平扩展成本低
【进阶】Python高级加密库cryptography
# 2.1 AES加密算法
### 2.1.1 AES加密原理
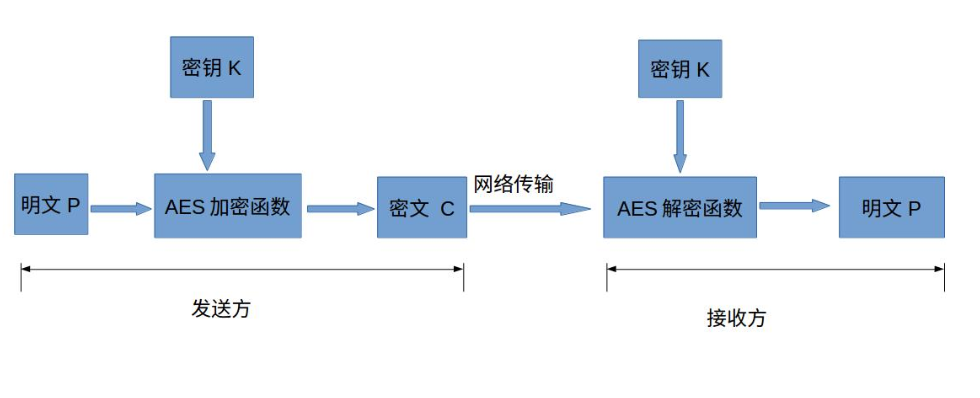
AES(高级加密标准)是一种对称块密码,由美国国家标准与技术研究院(NIST)于2001年发布。它是一种分组密码,这意味着它一次处理固定大小的数据块(通常为128位)。AES使用密钥长度为128、192或256位的迭代密码,称为Rijndael密码。
Rijndael密码基于以下基本操作:
- 字节替换:将每个字节替换为S盒中的另一个字节。
- 行移位:将每一行
【实战演练】前沿技术应用:AutoML实战与应用

# 1. AutoML概述与原理**
AutoML(Automated Machine Learning),即自动化机器学习,是一种通过自动化机器学习生命周期
【实战演练】构建简单的负载测试工具

# 1. 负载测试基础**
负载测试是一种性能测试,旨在模拟实际用户负载,评估系统在高并发下的表现。它通过向系统施加压力,识别瓶颈并验证系统是否能够满足预期性能需求。负载测试对于确保系统可靠性、可扩展性和用户满意度至关重要。
# 2. 构建负载测试工具
### 2.1 确定测试目标和指标
在构建负载测试工具之前,至关重要的是确定测试目标和指标。这将指导工具的设计和实现。以下是一些需要考虑的关键因素:
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )