ROS中的协作机器人:多机器人系统与任务分配
发布时间: 2023-12-16 23:32:13 阅读量: 122 订阅数: 52 
# 1. 简介
## 1.1 机器人操作系统(ROS)的概述
机器人操作系统(Robot Operating System,ROS)是一个用于编写机器人软件的开源框架。它提供了一系列的库和工具,用于帮助开发者构建机器人的各个方面,包括控制、感知、仿真和协作等。ROS是一个灵活、强大且广泛应用的平台,被广泛用于各种机器人应用领域。
## 1.2 协作机器人的定义和重要性
协作机器人是一种可以与人类或其他机器人共同工作的机器人。它们通过相互合作,完成复杂的任务和工作,从而提高效率和生产力。协作机器人的出现使得机器人能够在多个领域发挥重要作用,如工业生产线、医疗保健、服务业等。
协作机器人的重要性在于它们可以帮助人类完成繁重、危险或重复的工作,减轻人类的负担,提高工作效率。此外,协作机器人还可以提供更高的精度、准确性和速度,以及更强大的计算和数据处理能力,从而进一步推动各行业的发展。
## 1.3 目标和意义
本文的目标是深入探讨ROS中的协作机器人、多机器人系统和任务分配的重要性和实践应用。通过对ROS的介绍,我们将了解到ROS是如何为开发者提供一个强大的平台,来构建和运行协作机器人系统。
我们将介绍多机器人系统的架构、通信和协调机制,以及多机器人系统中面临的挑战。此外,我们还将研究协作机器人任务分配的基本原则、常见的任务分配算法,并探讨适用于ROS的任务分配算法。
最后,我们将通过实际案例分析,展示多机器人系统和任务分配在不同领域的应用,以及未来发展趋势中ROS与协作机器人的重要性和挑战。
## 2. ROS中的多机器人系统
在ROS中,多机器人系统是指由多个独立的机器人组成的系统,这些机器人可以通过通信和协调来实现协作任务。多机器人系统的概念是基于机器人操作系统(ROS)的分布式架构而来的。
### 2.1 多机器人系统的架构
在ROS中,多机器人系统的架构由多个独立的机器人节点组成,每个节点代表一个单独的机器人。这些节点可以在不同的物理机器上运行,通过ROS的通信机制来进行信息交换和协调。
多机器人系统的架构可以采用集中式或分布式的方式。在集中式架构中,存在一个中央节点负责协调和控制所有机器人的行为。而在分布式架构中,每个机器人节点都具有一定的自治性,并通过通信协议来进行协调和决策。
### 2.2 通信和协调
在ROS中,多机器人系统的通信和协调是通过ROS的消息传递机制来实现的。每个机器人节点可以发布和订阅不同类型的消息,用于与其他机器人节点进行交流。
机器人节点通过发布消息来传递自己的状态和感知信息,同时也可以通过订阅消息来获取其他机器人节点的信息。这样,机器人节点之间可以实现信息共享和协调,以便进行协作任务的执行。
### 2.3 多机器人系统的挑战
多机器人系统的设计和实现面临着一些挑战。其中一项主要挑战是实现即时和可靠的通信。由于机器人节点可能分布在不同的物理机器上,网络延迟和不可靠性会对通信质量产生影响。
另一个挑战是任务分配和协调。在多机器人系统中,需要合理地分配任务给不同的机器人,并确保它们之间的协调与同步。任务分配算法需要考虑机器人的能力、任务的优先级和限制条件等因素。
此外,多机器人系统的安全性和冲突解决也是挑战之一。机器人之间的碰撞、资源冲突和合作冲突都需要被考虑和解决,以确保系统的稳定和可靠性。
综上所述,多机器人系统在ROS中的实现涉及到通信和协调的机制,同时也需要解决任务分配、安全性和冲突解决等挑战。只有克服这些挑战,才能实现高效、可靠的协作机器人系统。
### 3. 任务分配算法
在ROS中,协作机器人的任务分配是实现有效协作的关键。本章将介绍协作机器人任务分配的基本原则、常见的任务分配算法以及适用于ROS的任务分

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《ROS专栏》是一本涵盖了广泛领域的ROS(机器人操作系统)学习指南和实践手册。本专栏从安装ROS开始,逐步介绍了ROS机器人模拟与仿真、传感器数据获取与处理、路径规划与导航等多个方面的内容。同时还详解了使用OpenCV进行图像处理、深度学习目标检测、语音识别与合成等实用功能。此外,读者还可以学习到PID控制、机器学习、协作机器人等高级算法的应用,并了解到ROS中传输与通信、数据记录与回放、动力学建模与控制等技术。此专栏还探索了将ROS应用于工业自动化和移动机器人的节能与自主充电等实践案例。通过本专栏的学习,读者可以全面了解ROS的各个领域,提高在机器人开发与应用方面的技能水平。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
数据备份与恢复:中控BS架构考勤系统的策略与实施指南

# 摘要
在数字化时代,数据备份与恢复已成为保障企业信息系统稳定运行的重要组成部分。本文从理论基础和实践操作两个方面对中控BS架构考勤系统的数据备份与恢复进行深入探讨。文中首先阐述了数据备份的必要性及其对业务连续性的影响,进而详细介绍了不同备份类型的选择和备份周期的制定。随后,文章深入解析了数据恢复的原理与流程,并通过具体案例分析展示了恢复技术的实际应用。接着,本文探讨
【TongWeb7负载均衡秘笈】:确保请求高效分发的策略与实施
.webp)
# 摘要
本文从基础概念出发,对负载均衡进行了全面的分析和阐述。首先介绍了负载均衡的基本原理,然后详细探讨了不同的负载均衡策略及其算法,包括轮询、加权轮询、最少连接、加权最少连接、响应时间和动态调度算法。接着,文章着重解析了TongWeb7负载均衡技术的架构、安装配置、高级特性和应用案例。在实施案例部分,分析了高并发Web服务和云服务环境下负载
【Delphi性能调优】:加速进度条响应速度的10项策略分析

# 摘要
本论文首先概述了信号定位技术的基本概念和重要性,随后深入分析了三角测量和指纹定位两种主要技术的工作原理、实际应用以及各自的优势与不足。通过对三角测量定位模型的解析,我们了解到其理论基础、精度影响因素以及算法优化策略。指纹定位技术部分,则侧重于其理论框架、实际操作方法和应用场
【PID调试实战】:现场调校专家教你如何做到精准控制
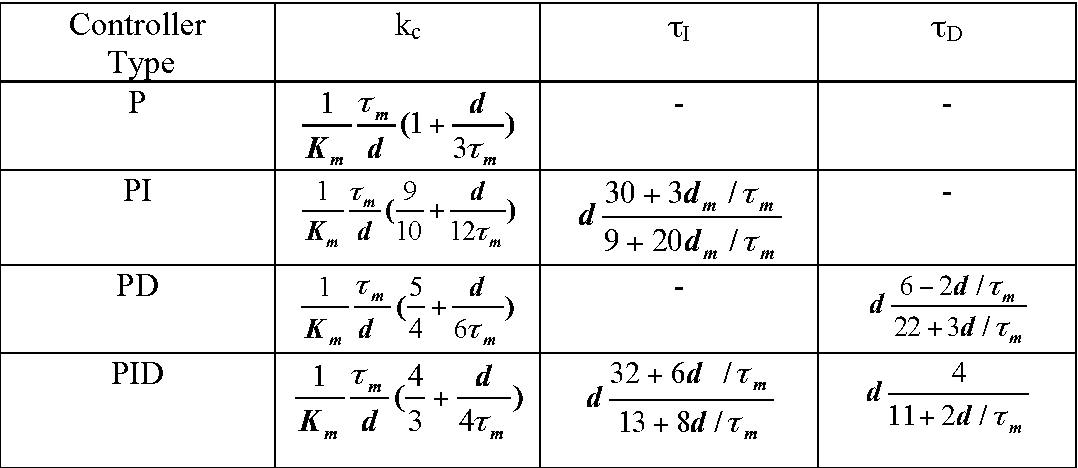
# 摘要
PID控制作为一种历史悠久的控制理论,一直广泛应用于工业自动化领域中。本文从基础理论讲起,详细分析了PID参数的理论分析与选择、调试实践技巧,并探讨了PID控制在多变量、模糊逻辑以及网络化和智能化方面的高级应用。通过案例分析,文章展示了PID控制在实际工业环境中的应用效果以及特殊环境下参数调整的策略。文章最后展望了PID控制技术的发展方
网络同步新境界:掌握G.7044标准中的ODU flex同步技术
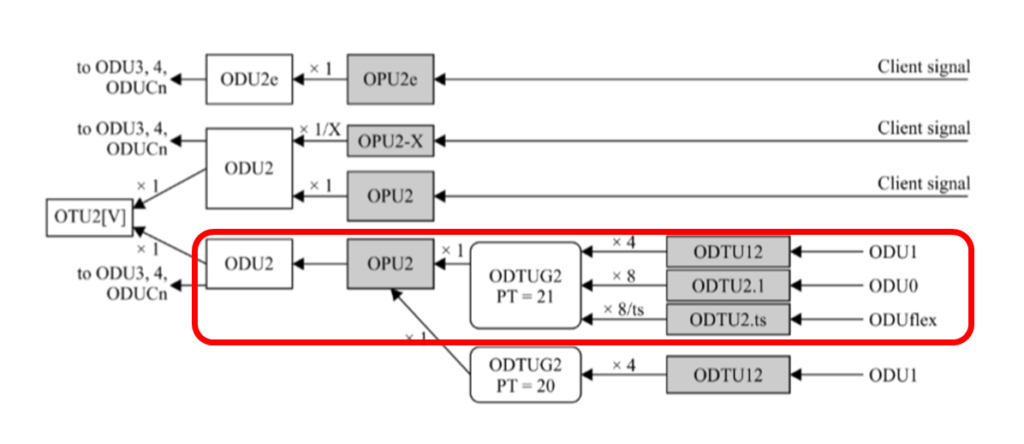
# 摘要
本文详细探讨了G.7044标准与ODU flex同步技术,首先介绍了该标准的技术原理,包括时钟同步的基础知识、G.7044标准框架及其起源与应用背景,以及ODU flex技术
字符串插入操作实战:insert函数的编写与优化
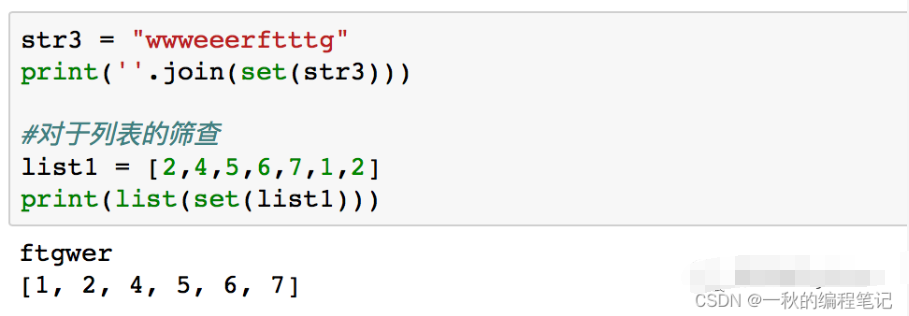
# 摘要
字符串插入操作是编程中常见且基础的任务,其效率直接影响程序的性能和可维护性。本文系统地探讨了字符串插入操作的理论基础、insert函数的编写原理、使用实践以及性能优化。首先,概述了insert函数的基本结构、关键算法和代码实现。接着,分析了在不同编程语言中insert函数的应用实践,并通过性能测试揭示了各种实现的差异。此外,本文还探讨了性能优化策略,包括内存使用和CPU效率提升,并介绍了高级数据结
环形菜单的兼容性处理

# 摘要
环形菜单作为一种用户界面元素,为软件和网页设计提供了新的交互体验。本文首先介绍了环形菜单的基本知识和设计理念,重点探讨了其通过HTML、CSS和JavaScript技术实现的方法和原理。然后,针对浏览器兼容性问题,提出了有效的解决方案,并讨论了如何通过测试和优化提升环形菜单的性能和用户体验。本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )