ROS移动机器人的节能与自主充电
发布时间: 2023-12-16 23:55:12 阅读量: 72 订阅数: 46 

移动机器人的SLAM与自主路径规划研究
# 1. 引言
## 1.1 移动机器人在现代社会中的应用
移动机器人是一种能够自主移动并执行各种任务的智能机器人,具有广泛的应用领域。在现代社会中,移动机器人被广泛应用于工业生产、医疗护理、物流仓储、室内清洁等不同领域。移动机器人的应用可以大大提高工作效率、减少人力成本、降低事故风险等。
工业生产是移动机器人应用的重要领域之一。在传统的工厂生产线上,移动机器人可以代替人工完成重复、繁琐、危险的工作,提高生产效率。例如,移动机器人可以在工厂中搬运重物、组装产品、检测质量等。另外,移动机器人还可以通过与其他机器人和设备的协作,实现智能化的生产流程。
医疗护理是移动机器人应用的另一个重要领域。移动机器人可以在医院中扮演护士、医生的角色,为患者提供基本医疗服务。例如,移动机器人可以测量患者的体温、血压,进行简单的诊断,监测患者的生理指标等。移动机器人还可以帮助患者转移,提供康复训练等。
物流仓储是移动机器人应用非常广泛的领域。在大型仓库和物流中心中,移动机器人可以代替人工进行货物的搬运、分拣、存储等工作。移动机器人可以根据仓库布局和货物需求,智能规划路径和避开障碍物,提高物流效率。另外,移动机器人还可以通过配备传感器和摄像头,准确识别货物和监测库存。
室内清洁是移动机器人应用的另一个常见领域。在家庭和办公场所,移动机器人可以代替人工进行地面清洁工作。移动机器人可以自主导航,识别地面污垢,并使用吸尘器、拖把等工具进行清洁。移动机器人还可以根据地面材质和不同区域的需求,自动调整清洁方式和强度。
## 1.2 节能和自主充电在移动机器人技术中的重要性
随着移动机器人应用的不断扩大,节能和自主充电成为移动机器人技术中的重要方向。移动机器人通常需要搭载电池供电,而电池容量有限,电池寿命短,需要频繁充电,这就对节能和自主充电提出了更高的要求。
节能是移动机器人技术中必须考虑的一个关键问题。节能不仅可以延长移动机器人的工作时间,提高工作效率,还可以降低能源消耗,减少对环境的影响。通过采用低功耗硬件设计、节能算法和优化方法,选择节能传感器和执行器等手段,可以实现移动机器人的节能增效。
自主充电是移动机器人技术中另一个重要的研究领域。自主充电系统可以使移动机器人实现自主充电,减少人工干预,提高工作效率和可靠性。通过设计和部署自主充电桩,开发充电管理算法和策略,保障自主充电系统的安全性和可靠性,可以实现移动机器人的自主充电功能。
## 2. ROS(机器人操作系统)介绍
机器人操作系统(ROS)是一个灵活的框架,为机器人软件开发提供了一套工具和库。它旨在成为一个统一的软件平台,简化了机器人的编程、控制和通信。ROS具有以下特点:
### 2.1 ROS的概念和特点
- **分布式计算**: ROS采用面向节点的通信模型,允许各个模块以节点的形式运行,并通过发布/订阅方式进行通信。
- **丰富的功能包**: ROS拥有丰富的功能包,涵盖了诸多机器人相关的功能,例如感知、定位、运动规划等。
- **跨平台性**: ROS支持在多种操作系统上运行,如Ubuntu、Fedora、Mac OS X和Windows。
- **强大的社区支持**: ROS拥有一个活跃的开发者社区,提供了大量的教程、文档和技术支持。
### 2.2 ROS在移动机器人中的应用
ROS在移动机器人中发挥着重要作用,其应用包括但不限于:
- **传感器数据处理**: ROS提供了处理传感器数据的工具包,能够有效地处理来自各种传感器的数据,如激光雷达、摄像头等。
- **运动控制**: ROS提供了强大的运动控制功能包,能够实现机器人的导航、路径规划和动作执行。
- **通信与协调**: ROS通过话题(Topic)和服务(Service)的方式实现模块之间的通信和协调,能够实现多模块的协同工作。
# 3. 节能技术在ROS移动机器人中的应用
移动机器人的节能是提高运行效率和续航能力的重要因素。在ROS(机器人操作系统)中,通过采用节能技术,可以有效地减少机器人的能耗,并延长其工作时间。本章将介绍在ROS移动机器人中应用节能技术的一些方法和实践。
## 3.1 低功耗硬件设计
在移动机器人的硬件设计中,选择低功耗的处理器、传感器和执行器可以显著降低机器人的能耗。同时,合理设计电路板和电源系统,以减少能量转换的损耗,也是节能的关键。以下是一个示例代码,演示如何在ROS中进行低功耗硬件设计。
```python
import rospy
from sensor_msgs.msg import LaserScan
from std_msgs.msg import Bool
def laser_scan_callback(data):
# 处理激光传感器数据
pass
def power_management_callback(data):
# 控制机器人的执行器和电源系统
pass
def low_power_hardware_design():
rospy.init_node('low_power_hardware_design')
rospy.Subscriber('/laser_scan', LaserScan, laser_scan_callback)
rospy.Subscriber('/power_management', Bool, power_management_callback)
rospy.spin()
if __name__ == '__main__':
low_power_hardware_design()
```
上述代码中,通过订阅激光传感器数据和电源管理信息的话题,实现了机器人对传感器数据的处理和执行器的控制。通过优化传感器的数据采集和执行器的控制方式,并根据电源管理信息调整功耗,可以达到节能的效果。
## 3.2 节能算法和优化方法
在移动机器人的算法和控制器设计中,采用节能的算法和优化方法可以减少计算和通信的能耗。例如,通过路径规划算法优化机器人的移动轨迹,减少机器人的运动距离和时间,以降低能耗。以下是一个路径规划优化的示例代码。
```java
import org.ros.node.AbstractNodeMain;
import org.ros.node.ConnectedNode;
import org.ros.node.NodeMain;
import org.ros.node.topic.Publisher;
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《ROS专栏》是一本涵盖了广泛领域的ROS(机器人操作系统)学习指南和实践手册。本专栏从安装ROS开始,逐步介绍了ROS机器人模拟与仿真、传感器数据获取与处理、路径规划与导航等多个方面的内容。同时还详解了使用OpenCV进行图像处理、深度学习目标检测、语音识别与合成等实用功能。此外,读者还可以学习到PID控制、机器学习、协作机器人等高级算法的应用,并了解到ROS中传输与通信、数据记录与回放、动力学建模与控制等技术。此专栏还探索了将ROS应用于工业自动化和移动机器人的节能与自主充电等实践案例。通过本专栏的学习,读者可以全面了解ROS的各个领域,提高在机器人开发与应用方面的技能水平。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Kepware EX6数据通讯:5大实用技巧让你的数据库交互效率翻倍
# 摘要
本文全面探讨了Kepware EX6在数据通讯领域的应用,从基础配置到高级功能进行了详细阐述。第一章介绍了Kepware EX6数据通讯的基础概念和配置方法。第二章深入分析了如何实现高效数据采集,性能监控与故障诊断,并提供了针对性的优化措施。第三章讨论了Kepware EX6在实时数据处理、大数据量处理和数据通讯安全与备份方面的实践技巧。第
从入门到精通:MATLAB矩阵初等变换的全方位深度解析
# 摘要
本文系统地探讨了MATLAB中矩阵初等变换的理论基础和实践操作。从定义、分类到几何意义,再到矩阵秩的影响,深入解析了初等变换的理论核心。通过实践章节,介绍了基本操作、分解技术、优化策略,以及如何在实际问题中应用矩阵初等变换,包括工程计算、数据分析、信号处理和控制理论。文章还着眼于MATLAB的内存管理和代码效率优化,探讨了减少计算负担
微机原理与云计算实战:打造数据中心硬件架构
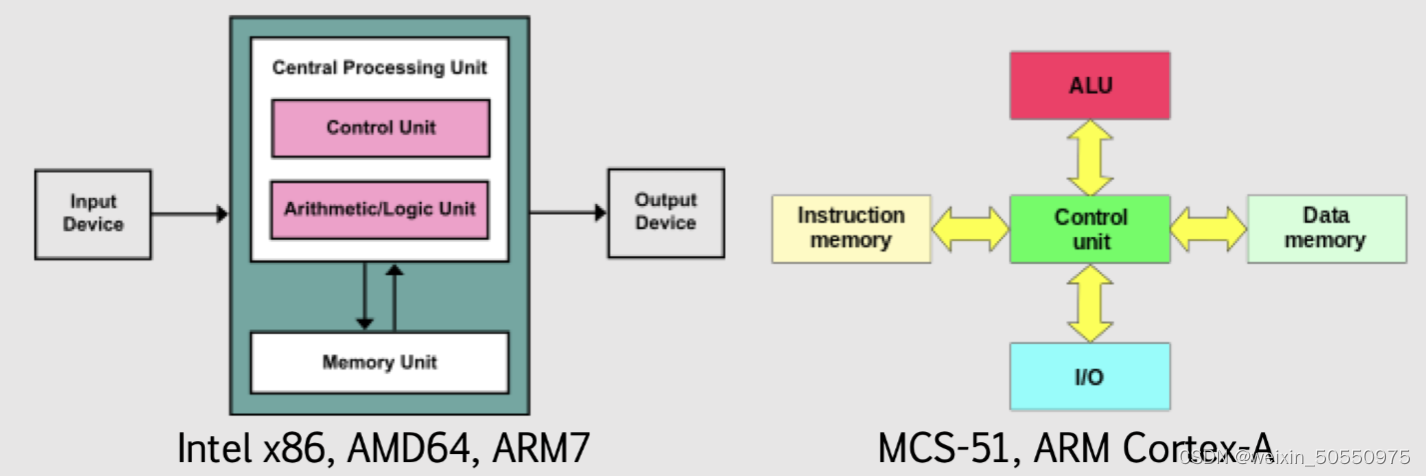
# 摘要
数据中心硬件架构在云计算服务中发挥着核心作用,其性能直接影响着云计算的效率和可靠性。本文首先概述了微机原理与云计算的关系,然后详细探讨了数据中心的硬件架构基础,包括CPU技术、存储技术、网络设备及它们在提升云计算性能中的应用。接着,本文从实践角度出发,分析了模块化设计、虚拟化技术以及高效散热系统的设计与实施。此外,本文还研究了数据中心硬件与不同云计算服务模型之间的关系,并探讨了自动化运维策略和容错备份的
和利时DCS故障诊断与解决大全:7大常见问题的快速处理方法
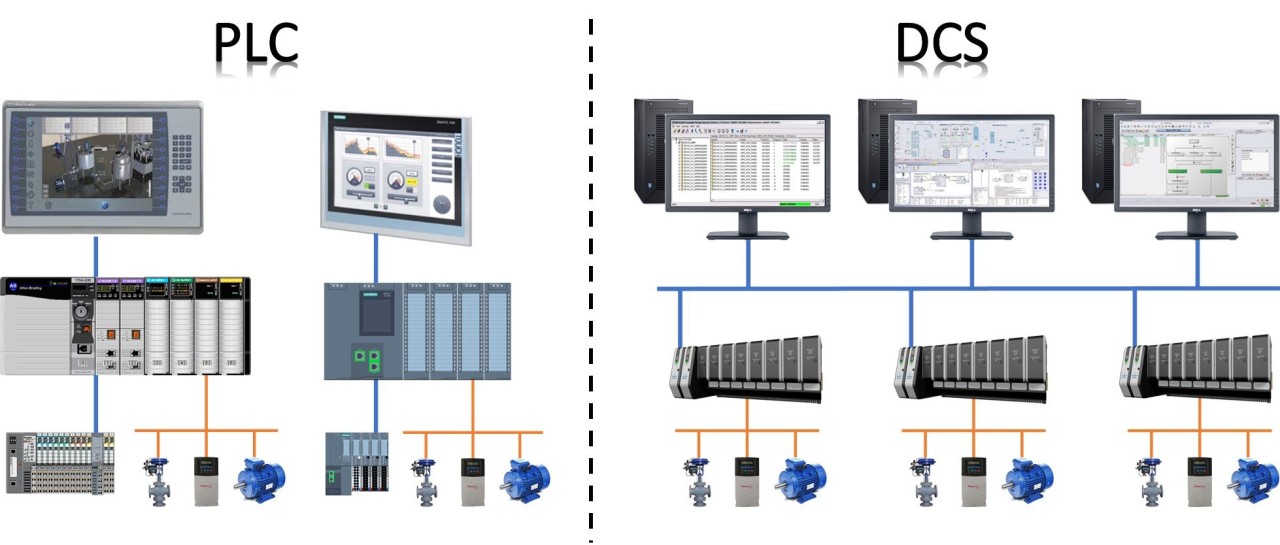
# 摘要
本文旨在为和利时DCS系统的故障诊断和优化提供全面概述。首先介绍了DCS系统的基础知识,随后深入探讨了故障诊断的理论和实践操作方法。文章详细分析了DCS系统中常见的7大问题,提出了诊断与快速处理的策略,并讨论了在这些问题发生时的
【SAP ATP性能优化】:揭秘系统响应速度提升的5大秘诀

# 摘要
本文全面探讨了SAP ATP的性能优化,从基础概述开始,深入分析了性能优化的理论基础、关键配置优化、系统升级及硬件优化,以及业务流程与应用层面的优化。特别强调了索引策略、SQL查询、内存管理等关键领域的优化技巧,以及如何利用系统硬件和数据库层面的调整来提升性能。文章还包括了系统升级的策略与实践、并行处理和多线程优化,并分析了业务流程梳理和应用层面的性能考量。最后,通过真实世界的案例研
MATLAB脚本编写秘籍:一步步打造你的第一款程序
# 摘要
MATLAB作为一种高性能的数值计算和可视化软件,广泛应用于工程计算、算法开发、数据分析等领域。本文从基础到高级应用,全面系统地介绍了MATLAB脚本编写、编程语言深入理解、脚本实战演练和高级技巧等多方面的知识。通过对MATLAB变量、数据结构、控制流程、调试与性能优化等内容的详细讲解,以及数值计算、信号处理、图形绘制等具体案例的分析,本文旨在帮助读者掌握MATLAB编程的核心能
掌握TRACEPRO核心算法:案例分析与性能优化策略

# 摘要
TRACEPRO算法是一种高效的光学追踪技术,它在精确模拟光学系统性能方面起着关键作用。本文首先概述了TRACEPRO算法的基本原理,随
【RTX64架构深度剖析】:性能提升的关键步骤与技术特点揭秘

# 摘要
本文旨在全面介绍RTX64架构,重点阐述其核心组件、性能提升的关键技术和实际应用场景。RTX64架构的处理器拥有先进的核心设计原则和高效的多级缓存机制,内存管理则采用虚拟地址空间和物理内存映射技术。通过并行计算与多线程、高效指令集以及电源管理优化,RTX64实现了卓越的性能。在实践应用方面,RTX64在服务器、云计算、高性能计算以及嵌入式系统等不同领域均有显著应
WinEdt模板管理:如何快速搭建和应用专业文档模板
# 摘要
本文全面介绍了WinEdt模板管理的基础知识、创建配置方法、分类管理策略、高级应用技巧以及实践案例。首先,文章探讨了WinEdt模板文件的结构,并分析了专业文档模板的创建步骤及其高级定制技巧。随后,论述了模板的分类管理、应用以及管理工具的使用。文章还深入探讨了模板的自动化功能扩展、国际化本地化处理,以及维护更新的最佳实践。第五章通
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )