ROS中的ROSbags:数据记录与回放
发布时间: 2023-12-16 23:41:43 阅读量: 101 订阅数: 44 

ros::spin() 和 ros::spinOnce()函数的区别及详解
# 1. 简介
## 1.1 什么是ROS?
ROS(Robot Operating System)是一种开源的、灵活的机器人操作系统框架,为机器人软件开发提供了一套丰富的工具和库。ROS于2007年开始由斯坦福大学人工智能实验室开发,现已成为机器人领域最受欢迎的软件平台之一。
ROS的设计理念是模块化和可重用性,它提供了一种让不同的软件组件(节点)之间相互通信和协同工作的方式。通过ROS,开发人员可以快速构建机器人控制、感知、导航等功能,简化了机器人软件的开发和集成过程。
## 1.2 什么是ROSbags?
ROSbags是ROS中一种常用的数据记录和回放工具。它可以将ROS系统中的各个节点的输入和输出数据以文件的形式进行存储,然后通过回放文件来重现历史数据,并进行调试、分析和测试。
ROSbags的核心功能是记录和回放ROS中的话题(Topic)消息。ROS中的话题是一种发布-订阅机制,允许不同的节点通过发布和订阅话题来进行信息交换。ROSbags可以记录发布到话题的消息,并在回放时模拟其发布过程,实现对话题消息的回放。
## 1.3 ROSbags的作用和优势
ROSbags具有以下几个作用和优势:
- **数据记录和回放**:ROSbags可以记录机器人系统的输入和输出数据,方便后续的调试和分析。通过回放ROSbags文件,可以重现历史数据,进行离线测试和验证。
- **灵活性和复用性**:ROSbags可以记录各种类型的消息,包括传感器数据、机器人状态、控制命令等。这些数据可以被不同的模块和工具复用,用于不同的目的,例如机器学习、数据分析、系统仿真等。
- **解耦和并发处理**:ROSbags将数据记录和数据处理的过程解耦,不同的节点可以独立地记录和回放数据,互不干扰。同时,多个节点可以并发地处理ROSbags文件,提高数据处理效率。
- **实时性和可靠性**:ROSbags可以记录和回放ROS系统中的消息,保证数据的实时性和可靠性。即使在系统故障或网络中断的情况下,ROSbags仍然可以存储和回放数据,确保数据不丢失。
## 2. ROSbags的基本知识
ROSbags是ROS中用于记录和回放数据的一种机制。在本章节中,我们将详细介绍ROSbags的结构和文件格式,以及常见的操作命令和配置选项。
### 2.1 ROSbags的结构和文件格式
ROSbags由多个记录的消息组成,可以包含多个主题的数据。每个消息都包含了时间戳和实际数据。
ROSbags的文件格式是一种特殊的二进制格式,通常以`.bag`作为文件扩展名。ROSbags可以存储任意类型的ROS消息,包括传感器数据、状态信息等。
### 2.2 ROSbags的常见操作命令
在ROS中,我们可以使用`rosbag`命令行工具来对ROSbags进行各种操作。下面列举了一些常用的命令:
- `rosbag record`:用于创建和记录ROSbags,可以指定要记录的主题和数据类型。
- `rosbag play`:用于回放ROSbags,可以指定要回放的bag文件和回放速度。
- `rosbag info`:用于查看ROSbags的详细信息,包括记录的主题、数据类型和时间范围等。
- `rosbag filter`:用于过滤和转换ROSbags中的数据,可以根据时间范围、主题和数据类型等条件进行过滤和转换。
### 2.3 ROSbags的参数和配置选项
在使用ROSbags时,我们可以通过配置选项来控制其行为和性能。以下是一些常见的参数和配置选项:
- `-a, --all-topics`:记录或回放所有可用主题的数据。
- `-b, --buffsize`:设置ROSbags的缓冲区大小,影响数据记录和回放的性能。
- `-j, --joints`:记录或回放关节信息,用于机器人运动控制。
- `-m, --split`:将ROSbags拆分成多个较小的文件,便于管理和传输。
- `-o, --output-name`:设置输出文件的名称,如果不指定,默认为当前时间戳。
通过合理配置这些参数和配置选项,我们可以根据实际需求来灵活使用ROSbags,并优化其性能和效果。
### 3. ROSbags的数据记录
在使用ROSbags进行数据记录时,我们需要了解如何创建和记录ROSbags、ROSbags的数据格式与存储方式,以及一些数据记录的最佳实践和技巧。
#### 3.1 如何创建和记录ROSbags
要创建ROSbags并开始记录数据,我们需要按照以下步骤进行操作:
1. 在终端中启动ROS系统:
```
$ roscore
```
2. 启动

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《ROS专栏》是一本涵盖了广泛领域的ROS(机器人操作系统)学习指南和实践手册。本专栏从安装ROS开始,逐步介绍了ROS机器人模拟与仿真、传感器数据获取与处理、路径规划与导航等多个方面的内容。同时还详解了使用OpenCV进行图像处理、深度学习目标检测、语音识别与合成等实用功能。此外,读者还可以学习到PID控制、机器学习、协作机器人等高级算法的应用,并了解到ROS中传输与通信、数据记录与回放、动力学建模与控制等技术。此专栏还探索了将ROS应用于工业自动化和移动机器人的节能与自主充电等实践案例。通过本专栏的学习,读者可以全面了解ROS的各个领域,提高在机器人开发与应用方面的技能水平。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【概率论与数理统计:工程师的实战解题宝典】:揭示习题背后的工程应用秘诀
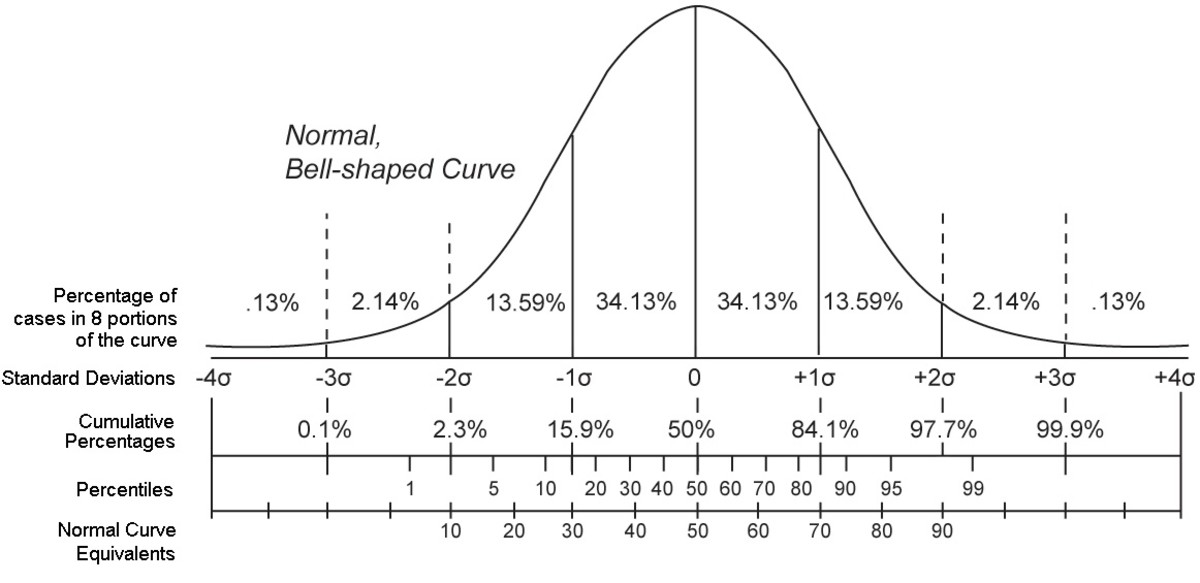
# 摘要
本文从概率论与数理统计的角度出发,系统地介绍了其基本概念、方法与在工程实践中的应用。首先概述了概率论与数理统计的基础知识,包括随机事件、概率计算以及随机变量的数字特征。随后,重点探讨了概率分布、统计推断、假设检验
【QSPr参数深度解析】:如何精确解读和应用高通校准综测工具

# 摘要
QSPr参数是用于性能评估和优化的关键工具,其概述、理论基础、深度解读、校准实践以及在系统优化中的应用是本文的主题。本文首先介绍了QSPr工具及其参数的重要性,然后详细阐述了参数的类型、分类和校准理论。在深入解析核心参数的同时,也提供了参数应用的实例分析。此外,文章还涵盖了校准实践的全过程,包括工具和设备准备、操作流程以及结果分析与优化。最终探讨了QSPr参数在系统优化中的
探索自动控制原理的创新教学方法

# 摘要
本文深入探讨了自动控制理论在教育领域中的应用,重点关注理论与教学内容的融合、实践教学案例的应用、教学资源与工具的开发、评估与反馈机制的建立以
Ubuntu 18.04图形界面优化:Qt 5.12.8性能调整终极指南

# 摘要
本文全面探讨了Ubuntu 18.04系统中Qt 5.12.8图形框架的应用及其性能调优。首先,概述了Ubuntu 18.04图形界面和Qt 5.12.8核心组件。接着,深入分析了Qt的模块、事件处理机制、渲染技术以及性能优化基
STM32F334节能秘技:提升电源管理的实用策略
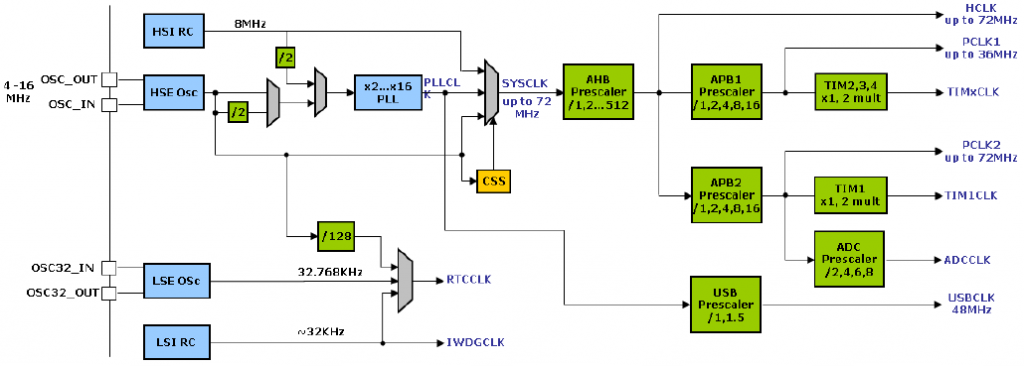
# 摘要
本文全面介绍了STM32F334微控制器的电源管理技术,包括基础节能技术、编程实践、硬件优化与节能策略,以及软件与系统级节能方案。文章首先概述了STM32F334及其电源管理模式,随后深入探讨了低功耗设计原则和节能技术的理论基础。第三章详细阐述了RTOS在节能中的应用和中断管理技巧,以及时钟系统的优化。第四章聚焦于硬件层面的节能优化,包括外围设备选型、电源管
【ESP32库文件管理】:Proteus中添加与维护技术的高效策略
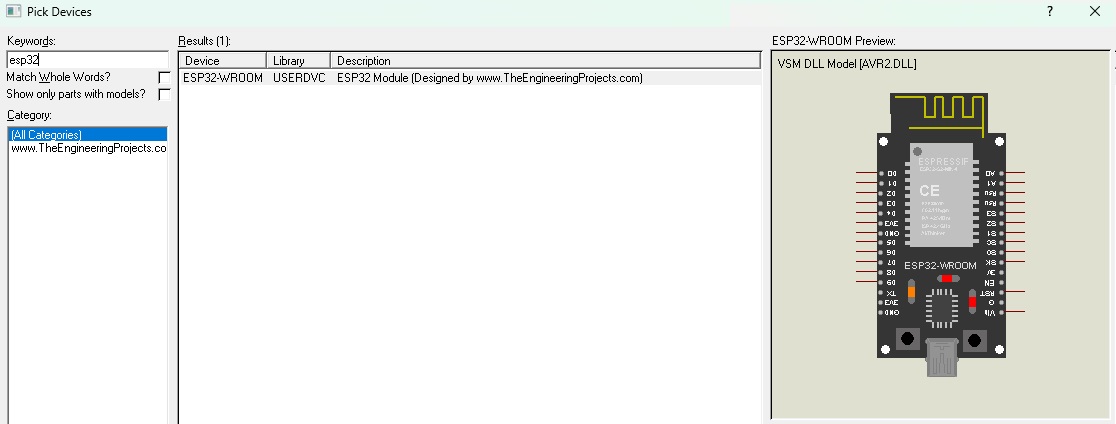
# 摘要
本文旨在全面介绍ESP32微控制器的库文件管理,涵盖了从库文件基础到实践应用的各个方面。首先,文章介绍了ESP32库文件的基础知识,包括库文件的来源、分类及其在Proteus平台的添加和配置方法。接着,文章详细探讨了库文件的维护和更新流程,强调了定期检查库文件的重要性和更新过程中的注意事项。文章的第四章和第五章深入探讨了ESP3
【实战案例揭秘】:遥感影像去云的经验分享与技巧总结

# 摘要
遥感影像去云技术是提高影像质量与应用价值的重要手段,本文首先介绍了遥感影像去云的基本概念及其必要性,随后深入探讨了其理论基础,包括影像分类、特性、去云算法原理及评估指标。在实践技巧部分,本文提供了一系列去云操作的实际步骤和常见问题的解决策略。文章通过应用案例分析,展示了遥感影像去云技术在不同领域中的应用效果,并对未来遥感影像去云技术的发
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )