STM32电机速度闭环控制设计
发布时间: 2024-03-30 07:21:37 阅读量: 54 订阅数: 39 
# 1. 简介
1.1 STM32在电机控制中的应用
1.2 速度闭环控制的基本概念
1.3 本文主旨介绍
# 2. 硬件准备
在进行STM32电机速度闭环控制设计之前,首先需要做好硬件准备工作。本章将介绍选用的STM32系列及开发环境、电机驱动器选择及连接方式,以及传感器选择与接线的相关内容。让我们一起来看看吧!
# 3. 软件设计
在电机速度闭环控制系统中,软件设计是至关重要的一部分。良好的软件设计可以保证系统稳定性和性能的提升。下面将详细介绍软件设计的相关内容:
#### 系统架构设计
在进行电机速度闭环控制时,系统架构设计是首要考虑的问题。一般来说,系统主要包括速度测量模块、PID控制模块、驱动输出模块等。其中,速度测量模块用于获取电机当前的转速信息,PID控制模块用于计算电机转速的误差,并调节输出来控制电机转速,驱动输出模块则将计算得到的控制量传输给电机驱动器。
#### 速度闭环控制算法
在速度闭环控制中,PID控制算法是最常用的控制算法之一。PID控制器包括比例项、积分项和微分项,分别用来处理当前误差、累积误差和误差变化率。通过调节PID参数,可以实现对电机速度的精准控制。
#### PID参数调节方法
PID参数的调节是整个闭环控制系统中非常关键的一环。常见的调参方法包括手动调节法、经验公式法、自整定法等。在实际应用中,通常需要结合具体的电机特性和实际需求来选择合适的调参方法,以达到最佳的控制效果。
通过合理的软件设计,可以实现对电机速度闭环控制系统的有效管理和控制,提高系统的稳定性和性能。
# 4. STM32程序开发
在STM32程序开发这一部分,我们将详细介绍如何进行初始化设置,实现速度测量算法以及编写控制循环代码。
#### 4.1 初始化设置
首先,我们需要进行必要的初始化设置,包括时钟配置、GPIO配置、定时器配置等。以下是一个简单的初始化设置示例代码(使用C语言):
```c
#include "stm32f4xx.h"
void SystemInit()
{
// 初始化系统时钟
SystemInit();
// 初始化GPIO
RCC->AHB1ENR |= RCC_AHB1ENR_GPIOAEN; //
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了STM32电机测速领域的重要原理与技术应用,涵盖了从PWM信号生成到PID控制算法的全面解析。通过TIM定时器实现电机速度测量,以及外部中断、编码器接口等方法实现精准的电机测速。同时,探讨了STM32电机的启停控制、加减速算法以及速度闭环调试技巧,为读者呈现了完整的电机控制设计流程。此外,还介绍了电机功率参数的检测与保护、震动抑制技术、相电流控制以及故障诊断与处理等实用技术。最后,通过DMA传输数据优化电机速度测量,为读者提供了更加高效的解决方案。本专栏旨在帮助读者深入理解STM32电机测速的原理与应用,以及掌握相关技术的实际操作技巧,为电机控制领域的工程师和爱好者提供有价值的参考与指导。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
自动化转换流程:编写脚本简化.a到.lib的操作指南

参考资源链接:[mingw 生成.a 转为.lib](https://wenku.csdn.net/doc/6412b739be7fbd1778d4987e?spm=1055.2635.3001.10343)
# 1. 自动化转换流程概述
在软件开发和维护过程
【Strmix Simplis电源设计】:构建高效稳定电源电路的关键步骤
参考资源链接:[Simetrix/Simplis仿真教程:从基础到进阶](https://wenku.csdn.net/doc/t5vdt9168s?spm=1055.2635.3001.10343)
# 1. Strmix Simplis电源设计简介
电源设计是电子系统中的一个关键组成部分,它影响着整个系统的性能和寿命。Strmix Simplis是一款集成
【VCS集群维护升级】:最佳实践与风险控制技巧揭秘

参考资源链接:[VCS用户手册:2020.03-SP2版](https://wenku.csdn.net/doc/hf87hg2b2r?spm=1055.2635.3001.10343)
# 1. VCS集群维护升级概述
维护和升级VCS集群是确保企业级IT基础设施高可用性和稳定性的关键操作。在当今快速变化的技术环境中,有效的集群管理不仅可以提升服务质量,还能提前预防
【Sabre Red日志分析精讲】:3个高级技术深入挖掘执行信息

参考资源链接:[Sabre Red指令-查询、定位、出票收集汇总(中文版)](https://wenku.csdn.net/doc/6412b4aebe7fbd1778d4071b?spm=1055.2635.3001.10343)
# 1. Sabre Red日志分析入门
## 1.1 认识Sab
【Maxwell在电力电子中的应用】:损耗控制与能效分析,行业新视角
参考资源链接:[Maxwell中的铁耗分析与B-P曲线设置详解](https://wenku.csdn.net/doc/69syjty4c3?spm=1055.2635.3001.10343)
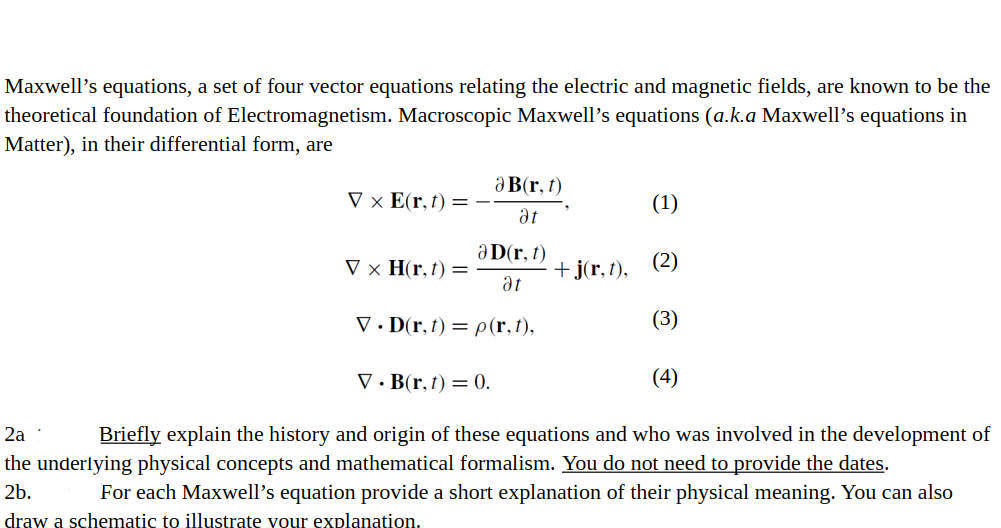
# 1. Maxwell理论基础及在电力电子中的地位
## Maxwell理论简介
詹姆斯·克拉克·麦克斯韦提出的Maxwell方程组是电磁学领域的基石,它
PM_DS18边界标记:技术革新背后的行业推动者
参考资源链接:[Converge仿真软件初学者教程:2.4版本操作指南](https://wenku.csdn.net/doc/sbiff4a7ma?spm=1055.2635.3001.10343)
# 1. PM_DS18边界标记的技术概览
## 1.1 边界标记技术简介
边界标记技术是一种在计算机科学中常用的技术,用于定义和处理数据元素之间的界限。这种技术广泛应用于数据管理、网络安全、信息检索等多个领域,提供了对数
【用户界面定制】:RTC6激光控制卡操作人性化解决方案
参考资源链接:[SCANLAB激光控制卡-RTC6.说明书](https://wenku.csdn.net/doc/71sp4mutsg?spm=1055.2635.3001.10343)
# 1. 用户界面定制的基础理念
在信息技术和用户需求不断演进的今天,用户界面(User Interface, UI)定制成为了提升产品用户体验和满足个性化需求的关键因素。基础理念涉及界面设计的人性化原则、简洁性
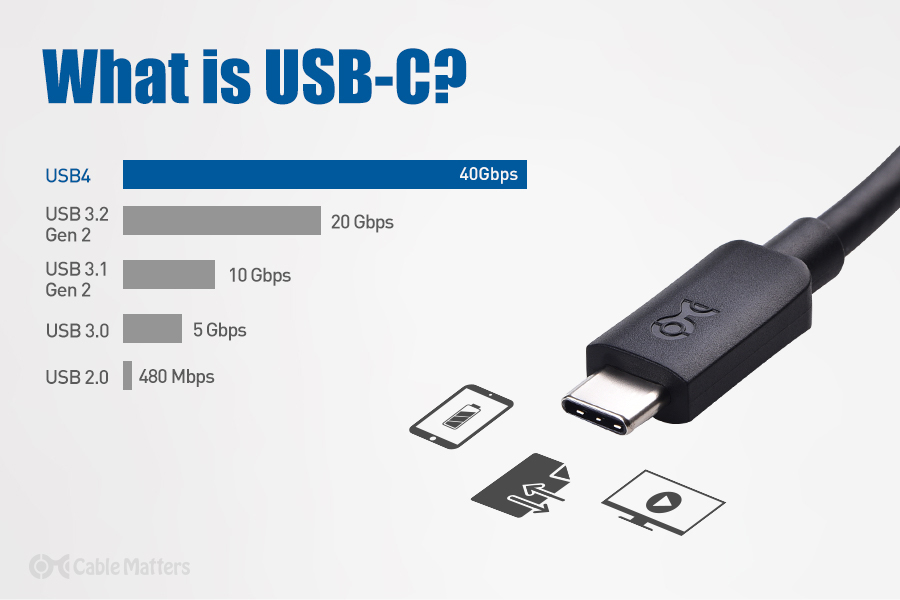
USB-C和Thunderbolt来了:VGA接口的未来替代技术探讨
参考资源链接:[标准15针VGA接口定义](https://wenku.csdn.net/doc/6412b795be7fbd1778d4ad25?spm=1055.2635.3001.10343)
# 1. VGA接口的历史与现状
## 1.1 VGA接口的起源与发展
VGA,即Video Graphics Array,是一种由IBM于1987年发布的视频传输接口标准。
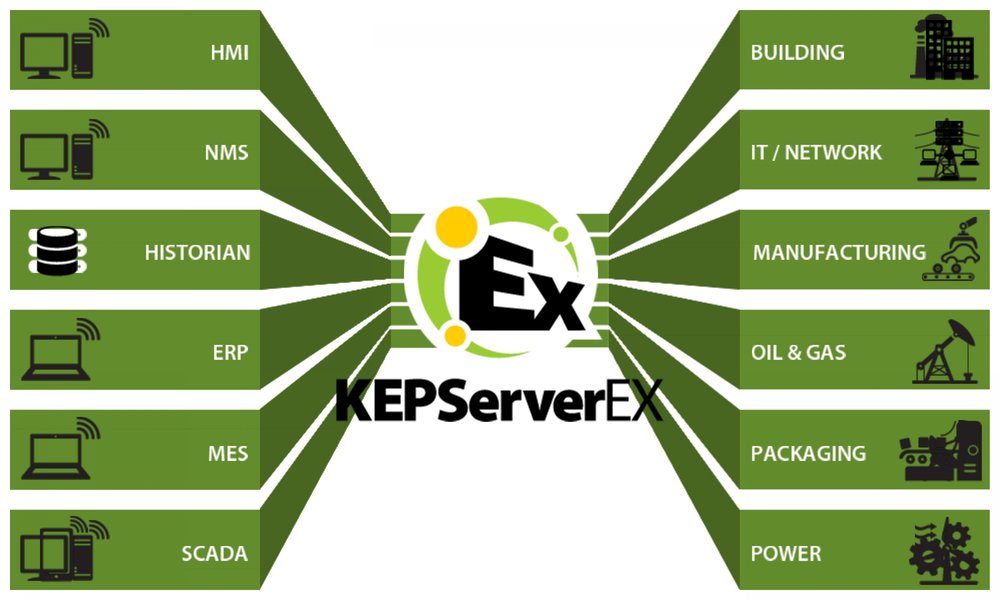
KEPSERVER与Smart200远程监控与维护:全面战略
参考资源链接:[KEPSERVER 与Smart200 连接](https://wenku.csdn.net/doc/64672a1a5928463033d77470?spm=1055.2635.3001.10343)
# 1. KEPSERVER与Smart200概述
工业自动化是现代制造业的核心,KEPServerEX 和 Smart200 是工业自动
中兴IPTV机顶盒应用安装秘籍:轻松管理你的应用库

参考资源链接:[中兴IPTV机顶盒 zx10 B860AV1.1设置说明](https://wenku.csdn.net/doc/64793a06d12cbe7ec330e370?spm=
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )