STM32单片机架构详解:揭秘内部机制,掌握核心技术
发布时间: 2024-07-01 10:47:06 阅读量: 113 订阅数: 35 
# 1. STM32单片机概述**
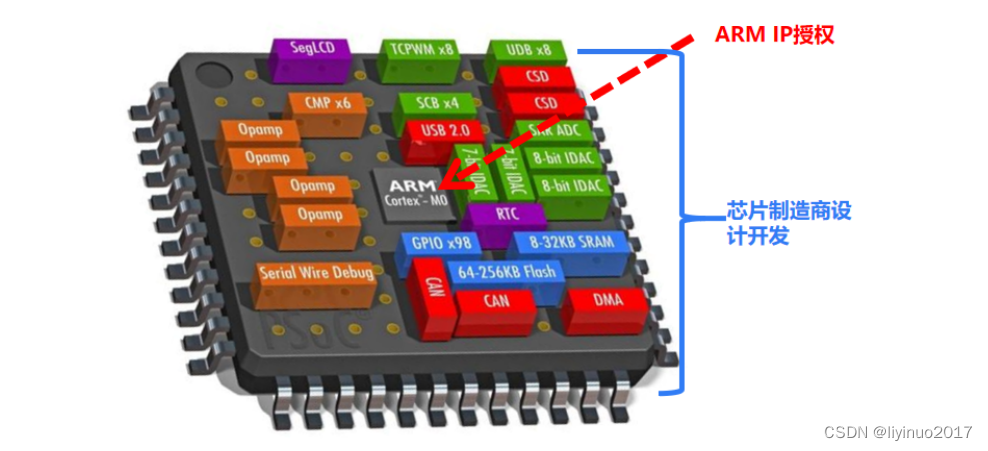
STM32单片机是意法半导体(STMicroelectronics)推出的基于ARM Cortex-M内核的高性能微控制器系列。它以其强大的处理能力、丰富的片上外设和广泛的应用场景而闻名。STM32单片机广泛应用于工业控制、汽车电子、医疗设备和消费电子等领域。
STM32单片机的特点包括:
- 基于ARM Cortex-M内核,提供卓越的处理性能
- 丰富的片上外设,包括GPIO、定时器、ADC、DAC和通信接口
- 低功耗设计,适用于电池供电设备
- 广泛的软件生态系统,包括开发工具、中间件和应用示例
# 2. STM32单片机硬件架构
STM32单片机采用ARM Cortex-M系列处理器内核,具有高性能、低功耗的特点。其硬件架构主要包括处理器内核、内存架构和外设接口。
### 2.1 处理器内核
STM32单片机采用ARM Cortex-M系列处理器内核,包括Cortex-M0、Cortex-M3、Cortex-M4和Cortex-M7等型号。这些内核具有不同的性能和功耗特性,满足不同应用需求。
- **Cortex-M0:**入门级内核,适用于低功耗、低成本应用。
- **Cortex-M3:**通用内核,平衡性能和功耗,广泛应用于嵌入式系统。
- **Cortex-M4:**高性能内核,支持浮点运算,适用于需要较高处理能力的应用。
- **Cortex-M7:**旗舰级内核,支持DSP指令集,适用于高性能、实时性要求高的应用。
### 2.2 内存架构
STM32单片机采用哈佛架构,即指令存储器和数据存储器分开。指令存储器通常为Flash存储器,而数据存储器为SRAM存储器。
- **Flash存储器:**存储程序代码和常量数据,具有非易失性,断电后数据不会丢失。
- **SRAM存储器:**存储变量和临时数据,具有易失性,断电后数据会丢失。
STM32单片机提供多种内存配置,包括Flash存储器容量、SRAM存储器容量和外置存储器接口。
### 2.3 外设接口
STM32单片机集成丰富的片上外设,包括GPIO、定时器、UART、SPI、I2C等。这些外设通过总线与处理器内核连接,方便用户进行外围设备的连接和控制。
- **GPIO(通用输入/输出端口):**用于连接外部设备,如按钮、LED和传感器。
- **定时器:**用于产生定时中断、PWM信号和捕获外部事件。
- **UART(通用异步收发器):**用于串行通信,如与PC机或其他设备通信。
- **SPI(串行外设接口):**用于高速串行通信,如与显示器或存储器通信。
- **I2C(两线串行接口):**用于低速串行通信,如与传感器或EEPROM通信。
STM32单片机的外设接口配置灵活,支持多种工作模式和参数设置,满足不同应用需求。
# 3. STM32单片机软件架构
### 3.1 中断机制
**中断概述**
中断是一种硬件机制,当发生特定事件时,它可以暂停当前执行的程序并跳转到指定的中断服务程序(ISR)中。STM32单片机支持多达100多个中断源,可用于处理各种事件,如外设中断、系统异常和错误。
**中断优先级**
STM32单片机的中断优先级分为24个等级,0为最高优先级,23为最低优先级。当多个中断同时发生时,优先级较高的中断将被优先处理。中断优先级可以通过NVIC(嵌套向量中断控制器)进行配置。
**中断向量表**
中断向量表是一个存储中断服务程序地址的数组。当发生中断时,CPU会根据中断号从中断向量表中获取ISR的地址,并跳转到该地址执行ISR。STM32单片机的中断向量表位于0x0000 0000地址处。
**代码块:中断向量表**
```c
// 中断向量表
const uint32_t __attribute__((section(".isr_vector"))) __vector_table[] = {
[0] = (uint32_t)&_estack, // 初始栈指针
[1] = (uint32_t)&Reset_Handler, // 复位处理程序
// ... 其他中断处理程序
};
```
**逻辑分析:**
* `__attribute__((section(".isr_vector")))`:将数组放置在`.isr_vector`节中,这是中断向量表的位置。
* `_estack`:初始栈指针,用于栈初始化。
* `Reset_Handler`:复位处理程序,在复位或上电时执行。
### 3.2 DMA机制
**DMA概述**
DMA(直接内存访问)是一种硬件机制,允许外设直接访问内存,无需CPU干预。这可以显著提高数据传输效率,特别是在需要高速传输大量数据的情况下。STM32单片机支持多个DMA控制器,每个控制器最多可以管理8个通道。
**DMA通道**
DMA通道是DMA控制器中的独立单元,负责处理特定的数据传输。每个通道可以配置为传输不同类型的数据,如字节、半字或字。DMA通道还具有以下特性:
* **源地址和目标地址:**指定数据传输的源地址和目标地址。
* **传输大小:**指定要传输的数据量。
* **传输模式:**指定数据传输的模式,如单次传输、循环传输或中断传输。
**代码块:DMA通道配置**
```c
// DMA通道配置
DMA_Channel_TypeDef *channel = DMA1_Channel1;
// 设置源地址
channel->CCR &= ~DMA_CCR_MEM2MEM;
channel->CMAR = (uint32_t)source_buffer;
// 设置目标地址
channel->CPAR = (uint32_t)destination_buffer;
// 设置传输大小
channel->CNDTR = transfer_size;
// 设置传输模式
channel->CCR |= DMA_CCR_CIRC; // 循环传输模式
// 启用DMA通道
channel->CCR |= DMA_CCR_EN;
```
**逻辑分析:**
* `DMA_Channel_TypeDef *channel`:指向DMA通道的指针。
* `channel->CCR &= ~DMA_CCR_MEM2MEM`:禁用内存到内存传输模式。
* `channel->CMAR = (uint32_t)source_buffer`:设置源地址。
* `channel->CPAR = (uint32_t)destination_buffer`:设置目标地址。
* `channel->CNDTR = transfer_size`:设置传输大小。
* `channel->CCR |= DMA_CCR_CIRC`:启用循环传输模式。
* `channel->CCR |= DMA_CCR_EN`:启用DMA通道。
### 3.3 RTOS支持
**RTOS概述**
RTOS(实时操作系统)是一种软件平台,为应用程序提供任务管理、同步和通信机制。STM32单片机支持多种RTOS,如FreeRTOS、μC/OS-III和embOS。RTOS可以显著简化多任务编程,并提高应用程序的实时性。
**任务管理**
RTOS的任务管理功能允许应用程序创建和管理多个任务。每个任务都有自己的堆栈和优先级,并可以独立运行。RTOS负责任务调度,确保高优先级任务优先执行。
**同步机制**
RTOS提供各种同步机制,如信号量、互斥量和事件标志,以协调多个任务之间的访问和通信。这些机制确保任务以受控的方式访问共享资源,避免数据竞争和死锁。
**通信机制**
RTOS还提供通信机制,如消息队列和管道,以实现任务之间的通信。这些机制允许任务安全地交换数据,而无需直接访问彼此的内存空间。
**代码块:FreeRTOS任务创建**
```c
// 创建任务
TaskHandle_t task_handle;
xTaskCreate(task_function, "Task Name", stack_size, NULL, priority, &task_handle);
```
**逻辑分析:**
* `xTaskCreate`:创建任务的函数。
* `task_function`:任务函数指针。
* `"Task Name"`:任务名称。
* `stack_size`:任务堆栈大小。
* `NULL`:任务参数。
* `priority`:任务优先级。
* `&task_handle`:任务句柄指针。
# 4. STM32单片机编程实践
### 4.1 GPIO编程
#### 4.1.1 GPIO简介
GPIO(General Purpose Input/Output)通用输入/输出端口是STM32单片机中非常重要的外设,它可以用于控制外部设备或读取外部信号。每个GPIO端口都可以配置为输入、输出或模拟输入模式。
#### 4.1.2 GPIO寄存器
STM32单片机的GPIO寄存器主要包括以下几个:
| 寄存器 | 描述 |
|---|---|
| GPIOx_MODER | 模式寄存器,用于配置GPIO端口的模式(输入、输出、模拟输入等) |
| GPIOx_OTYPER | 输出类型寄存器,用于配置GPIO端口的输出类型(推挽输出、开漏输出) |
| GPIOx_OSPEEDR | 输出速度寄存器,用于配置GPIO端口的输出速度(低速、中速、高速) |
| GPIOx_PUPDR | 上拉/下拉寄存器,用于配置GPIO端口的上拉/下拉电阻(上拉、下拉、浮空) |
| GPIOx_IDR | 输入数据寄存器,用于读取GPIO端口的输入数据 |
| GPIOx_ODR | 输出数据寄存器,用于设置GPIO端口的输出数据 |
#### 4.1.3 GPIO编程示例
以下是一个使用HAL库配置GPIO端口为输出模式并输出高电平的代码示例:
```c
#include "stm32f1xx_hal.h"
int main(void)
{
HAL_Init();
// 使能GPIOA时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
// 配置GPIOA的第5个端口为输出模式
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// 输出高电平
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);
while (1)
{
// 无限循环
}
}
```
### 4.2 定时器编程
#### 4.2.1 定时器简介
定时器是STM32单片机中另一个重要的外设,它可以用于产生定时中断、测量脉冲宽度、生成PWM波形等。STM32单片机有多种类型的定时器,每种类型都有其独特的特点和功能。
#### 4.2.2 定时器寄存器
STM32单片机的定时器寄存器主要包括以下几个:
| 寄存器 | 描述 |
|---|---|
| TIMx_CR1 | 控制寄存器1,用于配置定时器的基本功能(时钟源、计数模式、预分频等) |
| TIMx_CR2 | 控制寄存器2,用于配置定时器的高级功能(触发模式、输出模式等) |
| TIMx_CNT | 计数器寄存器,用于存储当前的计数值 |
| TIMx_ARR | 自动重装载寄存器,用于设置定时器的重装载值 |
| TIMx_PSC | 预分频寄存器,用于设置定时器的时钟预分频系数 |
#### 4.2.3 定时器编程示例
以下是一个使用HAL库配置定时器3为向上计数模式并产生1ms定时中断的代码示例:
```c
#include "stm32f1xx_hal.h"
int main(void)
{
HAL_Init();
// 使能定时器3时钟
__HAL_RCC_TIM3_CLK_ENABLE();
// 配置定时器3为向上计数模式
TIM_HandleTypeDef htim3;
htim3.Instance = TIM3;
htim3.Init.Prescaler = 7200 - 1; // 时钟预分频系数为7200
htim3.Init.CounterMode = TIM_COUNTERMODE_UP; // 向上计数模式
htim3.Init.Period = 1000 - 1; // 自动重装载值为1000
HAL_TIM_Base_Init(&htim3);
// 启动定时器3
HAL_TIM_Base_Start_IT(&htim3);
while (1)
{
// 无限循环
}
}
```
### 4.3 通信接口编程
#### 4.3.1 通信接口简介
通信接口是STM32单片机与外部设备进行数据交换的重要手段。STM32单片机支持多种通信接口,包括UART、SPI、I2C等。
#### 4.3.2 通信接口寄存器
STM32单片机的通信接口寄存器主要包括以下几个:
| 寄存器 | 描述 |
|---|---|
| USARTx_CR1 | 控制寄存器1,用于配置USART的基本功能(波特率、数据位、停止位等) |
| USARTx_CR2 | 控制寄存器2,用于配置USART的高级功能(硬件流控、中断等) |
| USARTx_DR | 数据寄存器,用于发送和接收数据 |
| USARTx_SR | 状态寄存器,用于指示USART的状态(发送完成、接收完成、错误等) |
| SPIx_CR1 | 控制寄存器1,用于配置SPI的基本功能(时钟极性、时钟相位、数据位等) |
| SPIx_CR2 | 控制寄存器2,用于配置SPI的高级功能(NSS管理、中断等) |
| SPIx_DR | 数据寄存器,用于发送和接收数据 |
| I2Cx_CR1 | 控制寄存器1,用于配置I2C的基本功能(时钟频率、地址模式等) |
| I2Cx_CR2 | 控制寄存器2,用于配置I2C的高级功能(中断、DMA等) |
| I2Cx_DR | 数据寄存器,用于发送和接收数据 |
#### 4.3.3 通信接口编程示例
以下是一个使用HAL库配置UART1为8位数据位、1个停止位、无校验的代码示例:
```c
#include "stm32f1xx_hal.h"
int main(void)
{
HAL_Init();
// 使能UART1时钟
__HAL_RCC_USART1_CLK_ENABLE();
// 配置UART1
UART_HandleTypeDef huart1;
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
HAL_UART_Init(&huart1);
// 发送数据
uint8_t data[] = "Hello World!\n";
HAL_UART_Transmit(&huart1, data, sizeof(data), 1000);
while (1)
{
// 无限循环
}
}
```
# 5.1 实时操作系统应用
实时操作系统(RTOS)是专为嵌入式系统设计的操作系统,它可以保证系统对时间要求严格的任务做出及时响应。STM32单片机支持多种RTOS,如FreeRTOS、µC/OS-II和embOS,这些RTOS提供了任务调度、同步机制和资源管理等功能。
### 任务调度
任务调度是RTOS的核心功能之一,它负责管理系统中的任务。任务是独立的执行单元,每个任务都有自己的代码和数据。RTOS使用调度算法来决定哪个任务可以运行,以及运行多长时间。常用的调度算法包括轮询调度、优先级调度和时间片调度。
### 同步机制
同步机制是RTOS用来协调多个任务之间访问共享资源的手段。常见的同步机制包括互斥锁、信号量和事件标志。互斥锁用于保护临界区,以确保同一时间只有一个任务可以访问临界区。信号量用于控制对有限资源的访问,例如内存缓冲区或外设。事件标志用于通知任务某个事件已经发生。
### 资源管理
RTOS还提供了资源管理功能,例如内存管理和外设管理。内存管理负责分配和释放内存空间,以满足任务的需要。外设管理负责管理系统中的外设,例如定时器、UART和ADC。
### STM32单片机与RTOS的应用
STM32单片机与RTOS的结合可以显著提高系统的性能和可靠性。RTOS可以帮助开发者创建复杂的嵌入式系统,这些系统需要对时间要求严格的任务做出及时响应。
以下是一些STM32单片机与RTOS的典型应用:
- 工业自动化
- 医疗设备
- 汽车电子
- 物联网设备

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏全面介绍了 STM32 单片机,从入门指南到高级编程技术,涵盖了广泛的主题。它深入探讨了 STM32 架构、时钟系统、GPIO 编程、定时器、中断机制、ADC 和 DAC 编程、I2C 和 CAN 通信、USB 通信、文件系统和固件升级。通过循序渐进的讲解和丰富的示例代码,本专栏旨在帮助初学者快速上手 STM32 开发,并为经验丰富的开发者提供深入的见解和实践技巧。它是一份宝贵的资源,可帮助您充分利用 STM32 单片机的强大功能,构建高效可靠的嵌入式系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【LAMMPS初探】:如何快速入门并掌握基本模拟操作

# 摘要
LAMMPS模拟软件因其在分子动力学领域的广泛应用而著称,本文提供了关于如何安装、配置和使用LAMMPS进行基本和高级模拟操作的全面指南。文章首先介绍了LAMMPS的系统环境要求、安装流程以及配置选项,并详细说明了运行环境的设置方法。接着,重点介绍了LAMMPS进行基本模拟操作的核心步骤,包括模拟体系的搭建、势能的选择与计算,以及模拟过程的控制。此外,还探讨了高级模拟技术,如分子动力学进阶应用
安全第一:ELMO驱动器运动控制安全策略详解
# 摘要
ELMO驱动器作为运动控制领域内的关键组件,其安全性能的高低直接影响整个系统的可靠性和安全性。本文首先介绍了ELMO驱动器运动控制的基础知识,进而深入探讨了运动控制系统中的安全理论,包括安全运动控制的定义、原则、硬件组件的作用以及软件层面的安全策略实现。第三章到第五章详细阐述了ELMO驱动器安全功能的实现、案例分析以及实践指导,旨在为技术人
编程新手福音:SGM58031B编程基础与接口介绍
# 摘要
SGM58031B是一款具有广泛编程前景的设备,本文首先对其进行了概述并探讨了其编程的应用前景。接着,详细介绍了SGM58031B的编程基础,包括硬件接口解析、编程语言选择及环境搭建,以及基础编程概念与常用算法的应用。第三章则着重于软件接口和驱动开发,阐述了库文件与API接口、驱动程序的硬件交互原理,及驱动开发的具体流程和技巧。通过实际案例
【流程标准化实战】:构建一致性和可复用性的秘诀
# 摘要
本文系统地探讨了流程标准化的概念、重要性以及在企业级实践中的应用。首先介绍了流程标准化的定义、原则和理论基础,并分析了实现流程标准化所需的方法论和面临的挑战。接着,本文深入讨论了流程标准化的实践工具和技术,包括流程自动化工具的选择、模板设计与应用,以及流程监控和质量保证的策略。进一步地,本文探讨了构建企业级流程标准化体系的策略,涵盖了组织结构的调整、标准化实施
【ER图设计速成课】:从零开始构建保险公司全面数据模型
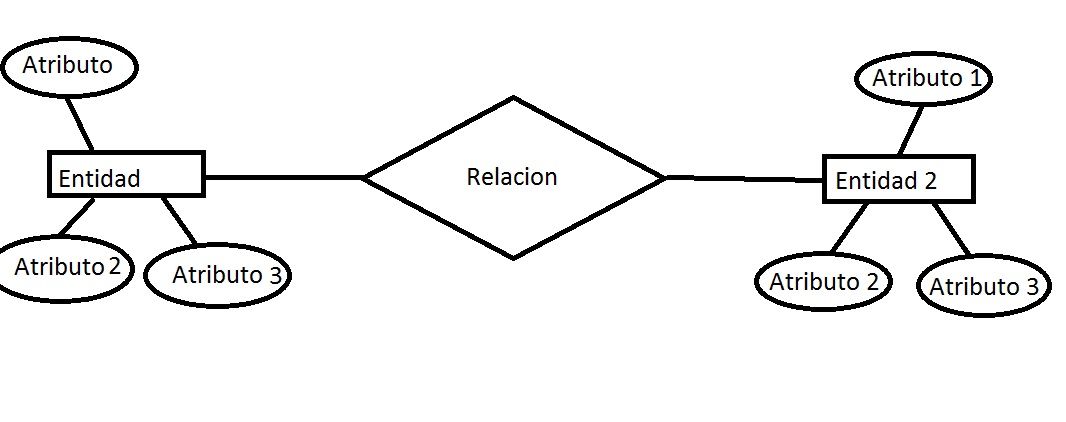
# 摘要
本文详细介绍了实体-关系图(ER图)在保险公司业务流程中的设计和应用。通过理解保险业务流程,识别业务实体与关系,并在此基础上构建全面的数据模型,本文阐述了ER图的基本元素、规范化处理、以及优化调整的策略。文章还讨论了ER图设计实践中的详细实体设计、关系实现和数据模型文档化方法。此外,本文探讨了ER图在数据库设计中的应用,包括ER图到数据库结构的映射、
揭秘Renewal UI:3D技术如何重塑用户体验
![[Renewal UI] Chapter4_3D Inspector.pdf](https://habrastorage.org/getpro/habr/upload_files/bd2/ffc/653/bd2ffc653de64f289cf726ffb19cec69.png)
# 摘要
本文首先介绍了Renewal UI的创新特点及其在三维(3D)技术中的应用。随后,深入探讨了3D技术的基础知识,以及它在用户界面(UI)设计中的作用,包括空间几何、纹理映射、交互式元素设计等。文中分析了Renewal UI在实际应用中的案例,如交互设计实践、用户体验定性分析以及技术实践与项目管理。此外,
【信息化系统建设方案编写入门指南】:从零开始构建你的第一个方案
# 摘要
信息化系统建设是现代企业提升效率和竞争力的关键途径。本文对信息化系统建设进行了全面概述,从需求分析与收集方法开始,详细探讨了如何理解业务需求并确定需求的优先级和范围,以及数据收集的技巧和分析工具。接着,本文深入分析了系统架构设计原则,包括架构类型的确定、设计模式的运用,以及安全性与性能的考量。在实施与部署方面,本文提供了制定实施计划、部署策
【多核与并行构建】:cl.exe并行编译选项及其优化策略,加速构建过程
# 摘要
本文系统地介绍了多核与并行构建的基础知识,重点探讨了cl.exe编译器在多核并行编译中的理论基础和实践
中文版ARINC653:简化开发流程,提升航空系统软件效率

# 摘要
ARINC653标准作为一种航空系统软件架构,提供了模块化设计、时间与空间分区等关键概念,以增强航空系统的安全性和可靠性。本文首先介绍了ARINC653的定义、发展、模块化设计原则及其分区机制的理论基础。接着,探讨了ARINC653的开发流程、所需开发环境和工具,以及实践案例分析。此外,本文还分析了ARINC653在航空系统中的具体应用、软件效率提升
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )