LSTM在图像识别中的潜力探索:开启新应用领域的大门
发布时间: 2024-11-20 19:35:07 阅读量: 16 订阅数: 49 

AVR单片机项目-ADC键盘(源码+仿真+效果图).zip
# 1. LSTM和图像识别的基础知识
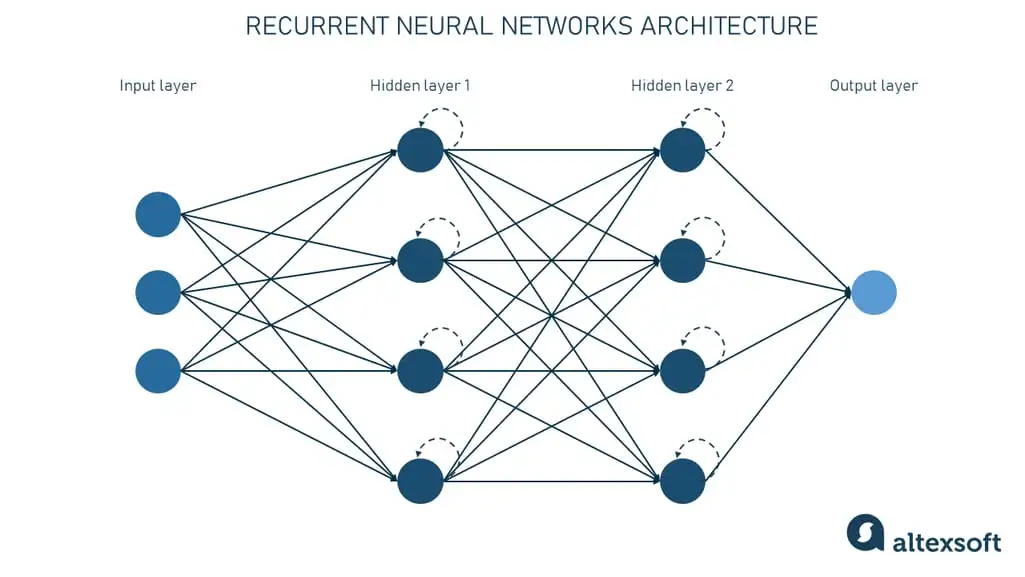
在这一章,我们将探讨LSTM(长短期记忆网络)和图像识别的基本概念和它们之间的关系。LSTM是一种特殊的循环神经网络(RNN),它解决了传统RNN在处理长序列数据时的梯度消失或梯度爆炸问题。它在自然语言处理、语音识别、图像识别等多个领域有着广泛的应用。
图像识别,则是使用计算机来识别和处理图像数据的一门技术。它包括了目标检测、图像分类、图像分割等任务,是计算机视觉领域的核心内容之一。近年来,LSTM被应用到图像识别中,尤其在处理图像序列和视频识别任务中表现出了独特的优势。
接下来的章节,我们将深入探讨LSTM的内部工作机制,它如何在图像识别任务中发挥作用,以及如何优化和应用这种技术。我们将从基础概念出发,逐步深入到实现细节和实际应用中。在这一章结束时,读者将对LSTM和图像识别有基本的了解,并为后续章节的学习打下坚实的基础。
# 2. LSTM网络的工作原理及实现
## 2.1 LSTM网络结构详解
### 2.1.1 LSTM单元的工作机制
LSTM(Long Short-Term Memory)是一种特殊的RNN(Recurrent Neural Network),能够学习长期依赖信息。LSTM的核心思想是在传统的RNN中引入了“门”结构,用以控制信息的流动。LSTM单元主要由三个门构成:遗忘门、输入门和输出门。这些门由一个或多个神经网络层组成,其中包含了Sigmoid激活函数,Sigmoid函数的输出范围在0到1之间,用于决定信息的保留程度。
- **遗忘门(Forget Gate)**:决定了上一个状态中哪些信息应该被忘记。它通过当前输入和上一个隐藏状态来计算,输出一个0到1之间的数字,对应每个状态变量应该保留的信息比例。
- **输入门(Input Gate)**:决定了当前输入的哪些信息需要被存储,并更新到当前的单元状态。它通常包含两个部分:一个Sigmoid层决定哪些值需要更新,另一个tanh层创建一个新的候选值向量,然后将这个向量与Sigmoid层的输出相乘,得到最终的更新值。
- **输出门(Output Gate)**:决定在下一个时间步长中输出什么值。首先,它通过当前输入和上一个隐藏状态计算当前的单元状态,然后使用另一个Sigmoid层来决定哪些信息将被输出。
代码块示例:
```python
# 伪代码展示LSTM单元的计算过程
class LSTMCell:
def __init__(self, ...):
# 初始化权重、偏置等参数
...
def forward(self, x, prev_state):
# 计算遗忘门、输入门、输出门和候选隐藏状态
forget_gate = ...
input_gate = ...
output_gate = ...
candidate_state = ...
# 更新单元状态和隐藏状态
cell_state = ...
hidden_state = ...
return hidden_state, cell_state
```
### 2.1.2 LSTM与传统RNN的比较
相较于传统RNN,LSTM在理论上解决了长期依赖问题,即传统RNN难以学习和记忆长距离的时序依赖关系。LSTM通过其复杂的“门”结构能够有效地选择性地记忆信息和忘记信息,使得长序列的依赖关系能被有效地捕获和使用。
- **长序列的处理能力**:LSTM通过门控机制能够保留较长时间跨度内的信息,而传统RNN会逐渐丢失早期信息,即出现梯度消失问题。
- **模型复杂度**:LSTM较传统RNN有更高的计算复杂度,因为其单元内部有多个门控结构,需要更多的参数和计算资源。
- **训练效率**:在实践中,LSTM通常需要更多的数据和时间进行训练,才能达到较好的性能。
- **适用场景**:LSTM适用于那些需要学习长期时间依赖的序列任务,如自然语言处理、语音识别、时间序列分析等。
## 2.2 LSTM的训练过程
### 2.2.1 序列数据的预处理方法
在训练LSTM模型之前,对输入数据进行适当的预处理是非常重要的一步。序列数据预处理通常包括以下几个步骤:
- **归一化**:将数据缩放到一个小的范围内,如[0,1]或[-1,1],以便模型更快收敛。
- **填充(Padding)**:确保所有序列输入到LSTM时有相同的长度,对于较短的序列,可以在末尾添加特殊值或零进行填充。
- **数据批处理**:将数据分成大小相等的批次,可以减少内存消耗,并加速训练过程。
- **序列切分**:将长序列切分为更小的片段,这有助于避免梯度消失或梯度爆炸的问题。
### 2.2.2 损失函数和优化器的选择
在训练神经网络时,损失函数和优化器的选择对模型的训练效果至关重要。
- **损失函数**:对于回归任务,常用的损失函数是均方误差(MSE),对于分类问题,交叉熵损失(Cross-Entropy)是更常见的选择。在LSTM模型中,可以使用以下公式来表达均方误差损失函数:
\[ L(y, \hat{y}) = \frac{1}{N} \sum_{i=1}^{N} (y_i - \hat{y_i})^2 \]
其中,\( y \)是真实值,\(\hat{y}\)是预测值,\( N \)是样本数量。
- **优化器**:优化器用于调整网络权重,以最小化损失函数。常见的优化器包括SGD、Adam、RMSprop等。Adam优化器结合了RMSprop和梯度下降动量法的优点,通常能够有效地训练深度神经网络,包括LSTM。
### 2.2.3 超参数调整和模型评估
超参数的调整对模型的性能有着决定性的影响。LSTM模型的超参数包括但不限于:
- **学习率**:决定权重更新的速度。
- **隐藏层单元数**:LSTM单元的数量。
- **批次大小(Batch size)**:一个批次中的样本数量。
- **迭代次数(Epochs)**:整个训练数据集被用来训练的次数。
模型评估主要通过交叉验证、混淆矩阵、精确度、召回率、F1分数、ROC曲线、AUC值等指标来衡量。
## 2.3 LSTM的实现技术
### 2.3.1 使用深度学习框架搭建LSTM
深度学习框架如TensorFlow和PyTorch提供了快速搭建LSTM网络的API。以PyTorch为例,通过定义LSTMCell或使用nn.LSTM模块,可以轻松实现LSTM网络。
```python
import torch
import torch.nn as nn
# 定义LSTM网络
class LSTM_Network(nn.Module):
def __init__(self, ...):
super(LSTM_Network, self).__init__()
self.lstm = nn.LSTM(input_size=..., hidden_size=..., num_layers=..., batch_first=True)
def forward(self, x):
# x的形状为(batch_size, seq_len, input_size)
output, (hn, cn) = self.lstm(x)
return output, (hn, cn)
# 实例化模型并进行训练...
```
### 2.3.2 高级优化技术的应用
除了传统的优化器外,还有一些高级技术能够提升LSTM模型的训练效果:
- **学习率衰减**:随着训练的进行逐渐减小学习率,帮助模型在收敛点附近进行更细致的调整。
- **早停法(Early Stopping)**:监控模型在验证集上的性能,一旦性能不再提升或开始下降,提前终止训练过程。
- **梯度裁剪(Gradient Clipping)**:防止梯度爆炸问题,通过将梯度限制在某个阈值范围内。
### 2.3.3 实际问题的调试和解决
在实际开发LSTM模型时,可能会遇到各种问题,如梯度消失、过拟合、收敛速度慢等。以下是一些常见的调试策略:
- **梯度消失**:使用ReLU或Leaky ReLU激活函数,初始化权重使用合适的策略,如He初始化或Xavier初始化。
- **过拟合**:采用dropout、权重衰减等正则化技术,增加数据集大小或使用数据增强。
- **收敛速度慢**:考虑调整学习率,使用更复杂的模型结构,或者加入预训练模型的权重作为起点。
在调试过程中,可视化损失函数和准确率的变化趋势,可以帮助我们更好地理解模型的训练状态,并做出相应的调整。
# 3. LSTM在图像识别中的应用实践
## 3.1 图像识别的挑战和方法
图像识别作为计算机视觉的核心

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
长短期记忆网络(LSTM)专栏深入探索了 LSTM 的原理、与 RNN 的对比、实战模型构建、NLP 中的应用、性能优化、正则化、网络结构、股票预测、多层网络、并行计算、图像识别、企业级解决方案、超参数调整、模型压缩和语音识别中的应用。通过一系列文章,专栏提供了全面的 LSTM 知识,从基础概念到高级应用,帮助读者掌握时间序列数据处理的艺术,并利用 LSTM 的强大功能解决各种机器学习问题。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【大华门禁系统搭建教程】:安全网络从零开始的秘诀

# 摘要
门禁系统是现代安全管理中不可或缺的组成部分,本文从基础介绍入手,全面阐述了门禁系统的关键技术和应用。首先介绍了门禁系统的基本组成,详细探讨了硬件的各个模块以及硬件选型的重要性。随后,文章深入门禁系统的软件设计和开发环节,涵盖了软件架构、功能模块设计,以及开发过程中的环境搭建、
【FPGA中的Aurora集成艺术】:测试与优化的最佳实践分享
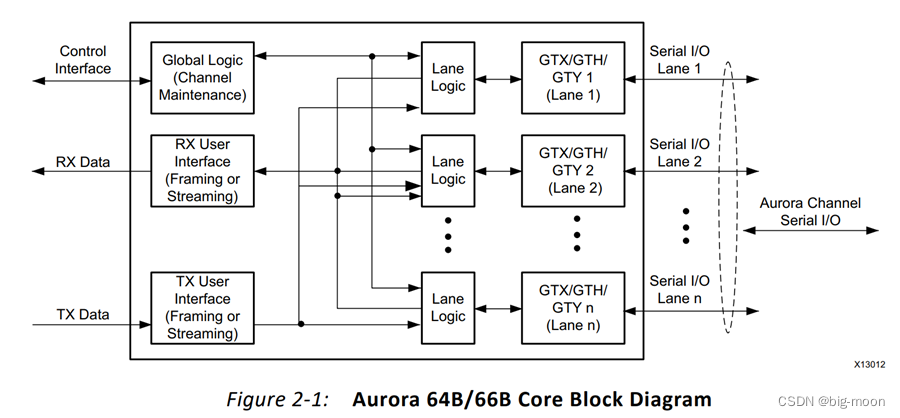
# 摘要
本文全面介绍了FPGA(现场可编程门阵列)和Aurora协议的基础知识、实施步骤、测试方法、性能优化策略以及未来展望。Aurora协议作为一种高速串行通信协议,其在FPGA上的实现对于高性能计算和数据传输具有重要意义。文章首先概述了Aurora协议的技术原理、关键特性和优势,并详细描述了在FPGA平台上实现Aurora的步骤,包括硬件配置、软件集成及系统时钟管理。接着,本文深入探讨了Aurora
【微服务与电商】:揭秘Spring Boot在电商领域的高效实践
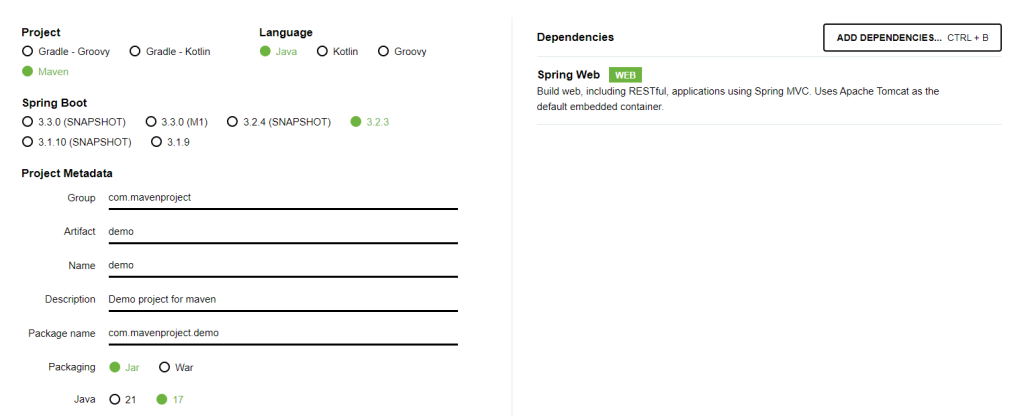
# 摘要
微服务架构已成为现代电商系统设计的关键技术,本文首先概述了微服务架构与电商系统的关系,接着深入探讨了Spring Boot框架的基础知识、组件管理和应用构建。随后,针对电商系统开发实践,文章详细介绍了商品管理、订单处理和用户支付模块的开发与集成。文章还探讨了如何通过优化数据库连接、实施安全策略和性能监控来提升Spr
浏览器缓存性能影响剖析:揭秘加速秘诀与优化技巧

# 摘要
浏览器缓存作为提升Web访问速度和效率的重要技术,其性能直接影响用户浏览体验和网站性能。本文详细概述了浏览器缓存的机制,探讨了缓存类型、作用以及控制策略,并分析了缓存一致性模型。接着,文章深入分析了缓存性能的多种影响因素,如缓存容量、存储介质、网络环境、服务器配置以及浏览器策略和用户行为的交互作用。进一步,提出了缓存性能的优化实
深入理解逐步回归:Matlab如何革新你的数据分析流程

# 摘要
逐步回归法是一种常用的统计分析方法,用于确定一组变量中哪些对预测响应变量最为重要。本文首先介绍了逐步回归法的理论基础,随后重点阐述了
【掌握cdk_cloudfront_plus-0.3.116权限管理】:保障企业CDN的安全与稳定

# 摘要
本文深入探讨了cdk_cloudfront_plus-0.3.116在权限管理方面的概念、基础理论、实践应用、高级应用,以及未来展望。首先概述了权限管理的重要性及其对CDN安全性的贡献,其次详细介绍了权限管理的基本概念和理论框架,包括认证与授权的区别、常见
【ibapDAV6中文版:性能优化秘籍】

# 摘要
ibapDAV6中文版作为一款技术产品,其性能分析和调优对于确保软件应用的高效运行至关重要。本文第一章概述了ibapDAV6中文版的性能概况,随后在第二章深入探讨性能测试理论,包括性能测试的基础、方法论和实战案例。第三章聚焦于性能调优技术,涵盖服务器配置、代码级优化和数据库性能管理。第四章提出了性能管理实践,包括监控预警系统、持续性能优化流程及案例分析。第五章则着重于分布式性能调优
Swan海浪模式快速入门:从零开始构建微服务架构
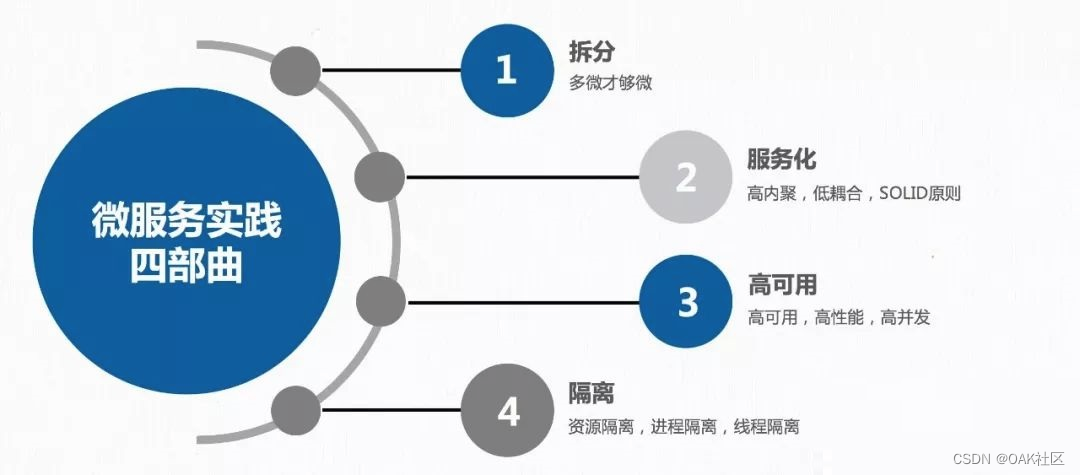
# 摘要
本文介绍了微服务架构与Swan海浪模式的基础知识及其在实践中的应用。首先概述了微服务架构的核心原则和设计模式,然后详细阐述了Swan海浪模式的组件功能、基础环境构建及监控维护。接着,文章深入探讨了在Swan海浪模式下微服务的注册与发现、负载均衡与容错以及安全策略的实现。最后,通过对分布式跟踪系统和微服务自动化治理的高级应用的分析,结合实际案例,总结了Swan海浪模式的经验和教训。本文旨在为读者提供
RTL8370N芯片固件升级最佳实践:安全与效能兼顾
# 摘要
本文详细探讨了RTL8370N芯片的固件升级过程及其重要性,涵盖了从理论基础到实践应用的各个方面。固件升级不仅能显著提升芯片性能,还能通过安全加固确保系统的稳定运行。文章首先介绍了固件升级的概念、作用及其对芯片性能的影响,随后阐述了升级的流程、步骤以及安全性考量。在实践篇中,重点讨论了升级环境的搭建、自动化脚本编写以及异常处理策略。性能优化与安全加固章节进一
Hyper-V安全秘籍:如何安全地禁用 Credential Guard与Device Guard
# 摘要
本文对Hyper-V虚拟化平台中的安全机制进行了综述,深入探讨了 Credential Guard 和 Device Guard 的工作原理与实施策略,并分析了在特定条件下禁用这些安全特性可能带来的必要性及风险。文章详细阐述了禁用 Credential Guard 和 Devi
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )