STM32单片机架构与工作原理:权威解读,深入剖析
发布时间: 2024-07-02 13:01:51 阅读量: 8 订阅数: 14 
# 1. STM32单片机的概述**
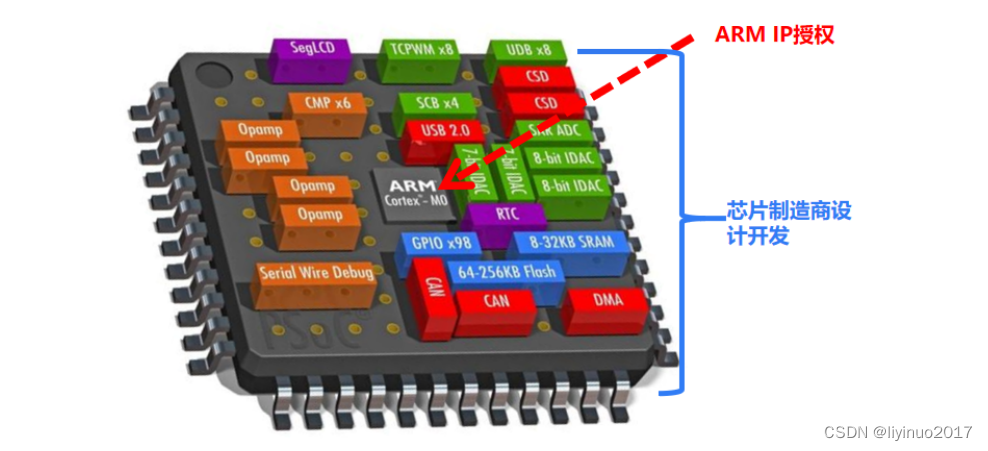
STM32单片机是意法半导体公司生产的一系列32位微控制器,基于ARM Cortex-M内核。它以其高性能、低功耗和丰富的外设而闻名,广泛应用于嵌入式系统中。
STM32单片机具有多种系列,如STM32F、STM32L和STM32G系列,每个系列都有不同的性能和功能。它们通常采用LQFP、QFN和BGA等封装形式,提供多种引脚数和外设配置。
# 2. STM32单片机的硬件架构
STM32单片机是意法半导体公司(STMicroelectronics)推出的32位微控制器系列,以其高性能、低功耗和丰富的外设而著称。其硬件架构主要由以下几个部分组成:
### 2.1 处理器内核
STM32单片机采用ARM Cortex-M系列内核,该内核专为嵌入式系统设计,具有低功耗、高性能和易于使用的特点。
#### 2.1.1 Cortex-M系列内核
Cortex-M系列内核有多个型号,包括Cortex-M0、Cortex-M3、Cortex-M4和Cortex-M7等。不同型号的内核具有不同的性能和功能,以满足不同的应用需求。
#### 2.1.2 内存管理单元(MMU)
MMU(Memory Management Unit)是可选的硬件模块,用于管理内存访问。它可以将物理内存划分为多个虚拟内存区域,并为每个区域设置不同的访问权限。MMU有助于提高系统的安全性,防止不同任务之间的内存冲突。
### 2.2 外围设备
STM32单片机集成了丰富的片上外围设备,包括:
#### 2.2.1 GPIO
GPIO(General Purpose Input/Output)引脚是单片机与外部设备通信的接口。它可以配置为输入、输出或双向模式,用于控制外部设备或读取外部信号。
#### 2.2.2 定时器
定时器是用于生成定时脉冲或测量时间间隔的模块。STM32单片机通常有多个定时器,每个定时器都可以独立配置和控制。
#### 2.2.3 ADC
ADC(Analog-to-Digital Converter)是将模拟信号转换为数字信号的模块。它可以将外部模拟信号(如电压或电流)转换为数字值,以便单片机处理。
### 2.3 总线结构
STM32单片机采用分层总线结构,包括AHB总线和APB总线。
#### 2.3.1 AHB总线
AHB(Advanced High-performance Bus)总线是高速总线,用于连接处理器内核和外设。它具有高带宽和低延迟,适合传输大量数据。
#### 2.3.2 APB总线
APB(Advanced Peripheral Bus)总线是低速总线,用于连接处理器内核和低功耗外设。它具有低功耗和低延迟,适合传输少量数据。
**表格:STM32单片机硬件架构组件**
| 组件 | 功能 |
|---|---|
| 处理器内核 | 执行指令和处理数据 |
| MMU | 管理内存访问 |
| GPIO | 与外部设备通信 |
| 定时器 | 生成定时脉冲或测量时间间隔 |
| ADC | 将模拟信号转换为数字信号 |
| AHB总线 | 高速总线,连接处理器内核和外设 |
| APB总线 | 低速总线,连接处理器内核和低功耗外设 |
**代码块:STM32单片机硬件架构初始化代码**
```c
// 初始化处理器内核
RCC_DeInit();
RCC_HSEConfig(RCC_HSE_ON);
RCC_WaitForHSEStartUp();
RCC_PLLConfig(RCC_PLLSource_HSE, RCC_PLLMul_9);
RCC_PLLCmd(ENABLE);
RCC_WaitForPLLStartUp();
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
RCC_HCLKConfig(RCC_SYSCLK_Div1);
RCC_PCLK1Config(RCC_HCLK_Div2);
RCC_PCLK2Config(RCC_HCLK_Div1);
// 初始化外围设备
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_All;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_Init(GPIOC, &GPIO_InitStruct);
```
**逻辑分析:**
这段代码首先初始化处理器内核,设置时钟频率和总线时钟。然后初始化所有GPIO引脚为输出模式,并设置输出类型为推挽输出。
**参数说明:**
* `RCC_DeInit()`:复位RCC寄存器。
* `RCC_HSEConfig()`:配置外部高速振荡器(HSE)。
* `RCC_WaitForHSEStartUp()`:等待HSE启动。
* `RCC_PLLConfig()`:配置PLL时钟。
* `RCC_PLLCmd()`:使能或禁用PLL时钟。
* `RCC_WaitForPLLStartUp()`:等待PLL启动。
* `RCC_SYSCLKConfig()`:配置系统时钟。
* `RCC_HCLKConfig()`:配置AHB时钟。
* `RCC_PCLK1Config()`:配置APB1时钟。
* `RCC_PCLK2Config()`:配置APB2时钟。
* `GPIO_Init()`:初始化GPIO引脚。
* `GPIO_InitStruct`:GPIO初始化结构体。
**流程图:STM32单片机硬件架构初始化流程**
```mermaid
sequenceDiagram
participant Processor
participant RCC
participant GPIO
Processor->RCC: RCC_DeInit()
RCC->RCC: RCC_HSEConfig()
RCC->RCC: RCC_WaitForHSEStartUp()
RCC->RCC: RCC_PLLConfig()
RCC->RCC: RCC_PLLCmd()
RCC->RCC: RCC_WaitForPLLStartUp()
RCC->RCC: RCC_SYSCLKConfig()
RCC->RCC: RCC_HCLKConfig()
RCC->RCC: RCC_PCLK1Config()
RCC->RCC: RCC_PCLK2Config()
Processor->GPIO: GPIO_Init()
```
# 3. STM32单片机的软件架构
### 3.1 内核和启动代码
#### 3.1.1 启动代码
STM32单片机的启动代码位于ROM中,负责在复位后初始化硬件和软件环境,为应用程序的执行做好准备。启动代码通常包含以下步骤:
- 复位向量:复位后程序执行的第一条指令,位于地址0x00000000。
- 栈指针初始化:设置栈指针指向RAM中的栈区域。
- 数据段初始化:将数据段(.data)从ROM复制到RAM中,并将其初始化为初始值。
- BSS段初始化:将BSS段(.bss)清零,BSS段是未初始化的数据段。
- 调用main函数:跳转到main函数,开始应用程序的执行。
#### 3.1.2 内核初始化
启动代码完成后,内核会进行初始化,主要包括:
- 中断向量表初始化:设置中断向量表,将中断服务程序的地址映射到中断向量表中。
- 系统时钟初始化:配置系统时钟,包括时钟源、时钟频率和时钟树。
- 外设初始化:初始化必要的外部设备,如GPIO、定时器和ADC。
### 3.2 标准库和中间件
#### 3.2.1 标准库
STM32单片机提供了丰富的标准库,包括:
- **C标准库:**提供了基本的C语言函数,如内存管理、字符串处理和数学运算。
- **STM32标准库:**提供了STM32单片机外设的低级驱动函数,如GPIO、定时器和ADC。
- **CMSIS库:**提供了与Cortex-M内核相关的通用函数,如中断处理和系统调用。
#### 3.2.2 中间件
中间件是介于操作系统和应用程序之间的软件层,提供了高级服务,如:
- **FreeRTOS:**一个实时操作系统,用于管理任务调度、同步和通信。
- **HAL库:**一个硬件抽象层,提供统一的API来访问STM32单片机的外设。
- **LwIP:**一个轻量级的TCP/IP协议栈,用于网络通信。
### 3.3 用户应用程序
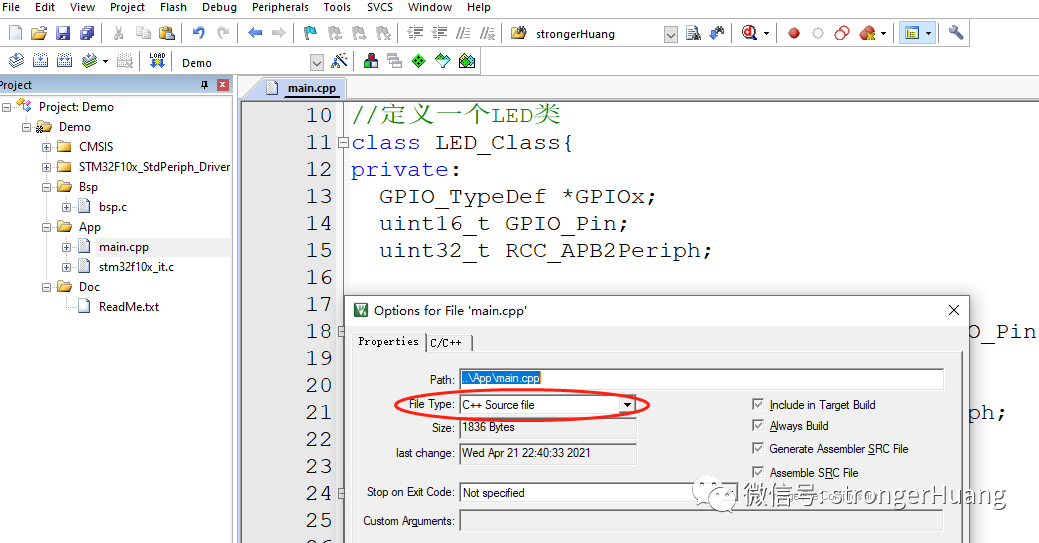
#### 3.3.1 应用代码结构
STM32单片机的用户应用程序通常采用以下结构:
- **头文件:**包含应用程序所需的宏、类型定义和函数声明。
- **源文件:**包含应用程序的实现代码。
- **链接脚本文件:**定义应用程序的内存布局和符号表。
#### 3.3.2 应用程序调试
STM32单片机提供了多种调试工具,包括:
- **串口调试:**通过串口打印调试信息。
- **JTAG调试:**使用JTAG接口连接调试器,进行单步执行、断点调试和寄存器查看。
- **SWD调试:**使用串行线调试(SWD)接口连接调试器,进行调试。
# 4. STM32单片机的应用实践**
STM32单片机凭借其强大的性能和丰富的功能,在嵌入式系统领域得到了广泛的应用。本章节将介绍一些STM32单片机的典型应用实践,包括LED闪烁程序、串口通信程序和定时器中断程序。
**4.1 LED闪烁程序**
**4.1.1 程序实现**
```c
#include "stm32f10x.h"
int main(void)
{
// 初始化GPIO
RCC->APB2ENR |= RCC_APB2ENR_IOPCEN;
GPIOC->CRH &= ~GPIO_CRH_MODE13;
GPIOC->CRH |= GPIO_CRH_MODE13_0;
GPIOC->CRH &= ~GPIO_CRH_CNF13;
GPIOC->CRH |= GPIO_CRH_CNF13_0;
// 循环闪烁LED
while (1)
{
GPIOC->ODR |= GPIO_ODR_ODR13;
for (int i = 0; i < 1000000; i++);
GPIOC->ODR &= ~GPIO_ODR_ODR13;
for (int i = 0; i < 1000000; i++);
}
}
```
**4.1.2 程序分析**
该程序首先初始化GPIOC的第13引脚为输出模式,然后进入一个无限循环。在循环中,程序交替设置和清除GPIOC的第13引脚,从而实现LED闪烁。
**4.2 串口通信程序**
**4.2.1 程序实现**
```c
#include "stm32f10x.h"
int main(void)
{
// 初始化串口
RCC->APB2ENR |= RCC_APB2ENR_USART1EN;
USART1->BRR = 0x0683;
USART1->CR1 |= USART_CR1_UE;
// 发送数据
USART1->DR = 'H';
while (!(USART1->SR & USART_SR_TC));
// 接收数据
while (!(USART1->SR & USART_SR_RXNE));
char data = USART1->DR;
// 处理数据
// ...
return 0;
}
```
**4.2.2 程序分析**
该程序首先初始化串口USART1,设置波特率为9600bps。然后,程序发送一个字符'H'并等待传输完成。接下来,程序等待接收数据,并将其存储在变量data中。最后,程序处理接收到的数据。
**4.3 定时器中断程序**
**4.3.1 程序实现**
```c
#include "stm32f10x.h"
int main(void)
{
// 初始化定时器
RCC->APB1ENR |= RCC_APB1ENR_TIM2EN;
TIM2->PSC = 7200 - 1;
TIM2->ARR = 1000 - 1;
TIM2->DIER |= TIM_DIER_UIE;
NVIC_EnableIRQ(TIM2_IRQn);
TIM2->CR1 |= TIM_CR1_CEN;
// 主循环
while (1);
}
void TIM2_IRQHandler(void)
{
// 清除中断标志位
TIM2->SR &= ~TIM_SR_UIF;
// 执行中断处理程序
// ...
}
```
**4.3.2 程序分析**
该程序首先初始化定时器TIM2,设置时钟分频系数为7200,自动重装载值为1000。然后,程序使能定时器中断并开启定时器。在主循环中,程序处于休眠状态,等待中断发生。
当定时器中断发生时,程序会执行中断处理程序。中断处理程序中,程序首先清除中断标志位,然后执行中断处理程序。中断处理程序的内容可以根据具体应用而定,例如,可以更新LED的状态或发送数据。
# 5.1 实时操作系统(RTOS)
### 5.1.1 RTOS简介
实时操作系统(RTOS)是一种专门为嵌入式系统设计的操作系统,它能够保证系统在可预测的时间内响应外部事件。RTOS具有以下特点:
- **实时性:**能够在可预测的时间内响应外部事件,满足实时应用的需求。
- **多任务性:**可以同时运行多个任务,提高系统的效率和并发性。
- **资源管理:**提供内存管理、任务调度和同步机制,确保系统资源的合理分配和使用。
- **确定性:**能够保证任务执行的时序和优先级,避免不可预测的延迟。
### 5.1.2 STM32上实现RTOS
在STM32单片机上实现RTOS需要以下步骤:
1. **选择RTOS:**根据应用需求选择合适的RTOS,如FreeRTOS、μC/OS-II或RT-Thread。
2. **移植RTOS:**将RTOS移植到STM32单片机平台,包括配置内核、创建任务和同步机制。
3. **编写应用程序:**在RTOS环境下编写应用程序,利用RTOS提供的API实现多任务、资源管理和实时响应。
以下是一个使用FreeRTOS在STM32单片机上实现多任务的代码示例:
```c
#include "FreeRTOS.h"
#include "task.h"
// 任务1的函数
void task1(void *pvParameters) {
while (1) {
// 执行任务1的代码
vTaskDelay(100);
}
}
// 任务2的函数
void task2(void *pvParameters) {
while (1) {
// 执行任务2的代码
vTaskDelay(200);
}
}
int main(void) {
// 创建任务1
xTaskCreate(task1, "Task1", 128, NULL, 1, NULL);
// 创建任务2
xTaskCreate(task2, "Task2", 128, NULL, 2, NULL);
// 启动任务调度器
vTaskStartScheduler();
return 0;
}
```
在该代码中,任务1和任务2同时运行,每隔100ms和200ms执行一次。任务调度器负责管理任务的执行顺序和时间片分配。
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 STM32 和 51 单片机的方方面面,涵盖了性能、架构、应用场景、指令集、编程技巧、外设解析、中断处理、通信接口、实时操作系统、定时器应用、ADC 详解、看门狗定时器、CAN 总线应用、单总线应用、DMA 传输、中断嵌套处理、GPIO 编程技巧、定时器应用案例、I2C 总线应用和单总线应用案例。通过权威解读、深入剖析和实战演练,本专栏旨在帮助读者全面掌握这些单片机的特性、工作原理和应用技术,从而提升嵌入式系统开发能力。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
管理团队项目和提高协作效率:AVR单片机C程序设计与协同开发
# 1. AVR单片机C程序设计概述
AVR单片机是一种8位RISC微控制器,以其低功耗、高性能和易用性而闻名。C语言是AVR单片机编程的常用语言,它提供了结构化和模块化的编程方式,简化了代码开发和维护。
本章将介绍AVR单片机C程序设计的概述,包括AVR单片机的架构、指令集、C语言在AVR单片机上的应用以及AVR单片机C程序设计的特点和优势。
# 2.1 AVR单片
VGGNet与Inception:探索两种不同深度学习模型架构,掌握模型设计的精髓
# 1. 深度学习模型架构概述**
深度学习模型架构是定义神经网络结构和连接方式的蓝图。它决定了模型如何处理输入数据,提取特征,并做出预测。常见的深度学习模型架构包括:
* **前馈神经网络 (FFNN):**一种简单的神经网络,其中数据从输入层流向输出层,不涉及循环或反馈。
* **卷积神经网络 (CNN):**一种专门用于处理图像数据的网络,利用卷积运算提取特征。
* **循环神经网络 (RNN):**一种处理序列数据的网络,具有记忆能力,可以记住先前的输入。
# 2. VGGNet架构
### 2.1 VGGNet的网络结构
VGGNet(Visual Geometry Gro
PIC单片机C程序设计进阶:嵌入式Linux系统的深入解析

# 1. PIC单片机C程序设计基础
PIC单片机是一种广泛应用于嵌入式系统的微控制器。它以其低成本、高性能和易于使用而著称。本节将介绍PIC单片机C程序设计的相关基础知识,包括:
- PIC单片机的架构和指令集
- C语言在PIC单片机上的应用
- PIC单片机C程序设计环境的搭建和使用
- PIC单片机C程序设计的实践技巧
# 2. 嵌入式Linux系统简介
### 2.1 Linux内
单片机C语言结构体与联合体揭秘:数据结构的艺术,让代码更优雅
# 1. 数据结构基础**
数据结构是组织和存储数据的抽象概念,为数据提供高效的访问和管理方式。数据结构的选择对程序的性能、内存占用和可维护性至关
MySQL云化实践指南:拥抱云计算优势,提升数据库运维效率
# 1. MySQL云化的理论基础**
MySQL云化是一种将MySQL数据库部署在云计算平台上的实践,它利用云计算的弹性、可扩展性和成本效益优势,为数据库管理提供更灵活、高效和可靠的解决方案。
MySQL云化的理论基础包括:
* **云计算的优势:**云计算提供按需分配的计算、存储和网络资源,可以根据业务需求动态扩展或缩减,从而降低成本并提高资源利用率。
8051单片机程序设计中的调试技巧:快速定位问题,提升开发效率,缩短调试周期,保障程序质量

# 1. 8051单片机程序设计调试概述
8051单片机程序设计调试是软件开发过程中不可或缺的一环,其目的是找出和解决程序中的错误,确保程序的正确性和可靠性。本章将概述8051单片机程序调试的基本概念、方法和工具,为后续章节的深入探讨奠定基础。
**调
单片机C51程序设计:CAN通信深入解析,工业自动化通信不再是难题

# 1. CAN通信基础**
CAN(控制器局域网络)是一种广泛应用于工业自动化、汽车电子等领域的通信协议。它以其高可靠性、实时性、抗干扰性强等特点而著称。本章将介绍CAN通信的基础知识,包括CAN总线物理层、CAN控制器简介、CAN帧格式和CAN通信机制。
# 2. C51单片机CAN通信编程**
**2.1 CAN通信硬件接口**
**
51单片机C语言程序设计中的无线通信与应用:连接世界的纽带
# 1. 51单片机C语言程序设计概述**
51单片机C语言程序设计是基于C语言对51单片机进行编程,实现各种功能和控制。C语言是一种结构化、面向过程的编程语言,具有语法简洁、可移植性强等特点。
51单片机是8位单片机,具有资源有限、执行效率高的特点。C语言程序设计可以充分利用51单片机的特点,实现高效、稳定的控制功能。
51单片机C语言程序设计涉及到以下主要内容:数据类型、运算符、控制语句、函数、数组、结构体、指针、中断等。
Kafka消息队列实战:从入门到高阶应用
# 1. Kafka消息队列简介**
Kafka是一个分布式流式处理平台,用于构建实时数据管道和应用程序。它提供了一个可扩展、高吞吐量和低延迟的消息传递系统,可用于处理
双曲正弦函数复变函数应用:探索函数奥秘
# 1. 双曲正弦函数的理论基础**
双曲正弦函数(sinh)是双曲函数族中的一员,其定义为:sinh x = (e^x - e^(-x)) / 2。它与三角函数正弦函数(sin)类似,但作用于双曲角而不是平面角。
sinh 函数具有以下基本性质:
- 奇函数:sinh(-x) = -sinh x
- 导数:d/dx sinh x = cosh x,其中 cosh x = (e^x
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )