STM32单片机外设全解析:从GPIO到DMA,一网打尽
发布时间: 2024-07-02 13:05:17 阅读量: 107 订阅数: 60 

STM32 GPIO——快速IO的使用

# 1. STM32单片机外设概述**
STM32单片机外设是其功能强大的组成部分,提供各种特性,增强了单片机的功能。外设可以分为通用外设、通信外设和高级外设。
通用外设包括GPIO、定时器和看门狗定时器,用于基本的输入/输出、时间测量和系统复位。通信外设,如串口、I2C和SPI,用于与外部设备进行数据传输。高级外设,如DMA、ADC和DAC,提供高级功能,如数据传输优化、模拟信号转换和数字信号生成。
了解STM32单片机外设对于充分利用其功能至关重要。本指南将深入探讨每个外设,包括其功能、配置和应用,帮助开发人员充分发挥STM32单片机的潜力。
# 2. 通用外设**
**2.1 通用输入/输出(GPIO)**
**2.1.1 GPIO引脚配置**
GPIO引脚配置是控制GPIO引脚电气特性的关键步骤。STM32单片机提供了丰富的GPIO配置选项,包括引脚模式、输出类型、上拉/下拉电阻等。
**代码块:**
```c
// 配置GPIOA的第5个引脚为输出模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.Pin = GPIO_PIN_5;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStructure.Pull = GPIO_PULLUP;
GPIO_InitStructure.Speed = GPIO_SPEED_FAST;
HAL_GPIO_Init(GPIOA, &GPIO_InitStructure);
```
**逻辑分析:**
* `GPIO_InitTypeDef GPIO_InitStructure;`:定义GPIO初始化结构体变量。
* `GPIO_InitStructure.Pin = GPIO_PIN_5;`:设置要配置的引脚为GPIOA的第5个引脚。
* `GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;`:设置引脚模式为推挽输出模式。
* `GPIO_InitStructure.Pull = GPIO_PULLUP;`:设置引脚的上拉电阻。
* `GPIO_InitStructure.Speed = GPIO_SPEED_FAST;`:设置引脚的速度为快速。
* `HAL_GPIO_Init(GPIOA, &GPIO_InitStructure);`:使用HAL库初始化GPIO引脚。
**2.1.2 GPIO中断处理**
GPIO中断处理允许STM32单片机在GPIO引脚发生特定事件(如电平变化)时执行特定的操作。STM32单片机支持多种GPIO中断类型,包括外部中断、上升沿中断、下降沿中断等。
**代码块:**
```c
// 配置GPIOA的第5个引脚为外部中断
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.Line = EXTI_LINE5;
EXTI_InitStructure.Mode = EXTI_MODE_INTERRUPT;
EXTI_InitStructure.Trigger = EXTI_TRIGGER_RISING;
EXTI_InitStructure.GPIOSel = EXTI_GPIO_PortA;
HAL_EXTI_Init(&EXTI_InitStructure);
// 注册GPIOA的第5个引脚中断回调函数
HAL_EXTI_Callback(EXTI_LINE5, EXTI_Callback);
```
**逻辑分析:**
* `EXTI_InitTypeDef EXTI_InitStructure;`:定义外部中断初始化结构体变量。
* `EXTI_InitStructure.Line = EXTI_LINE5;`:设置要配置的中断线为EXTI_LINE5(对应GPIOA的第5个引脚)。
* `EXTI_InitStructure.Mode = EXTI_MODE_INTERRUPT;`:设置中断模式为中断模式。
* `EXTI_InitStructure.Trigger = EXTI_TRIGGER_RISING;`:设置中断触发类型为上升沿触发。
* `EXTI_InitStructure.GPIOSel = EXTI_GPIO_PortA;`:设置中断引脚为GPIOA。
* `HAL_EXTI_Init(&EXTI_InitStructure);`:使用HAL库初始化外部中断。
* `HAL_EXTI_Callback(EXTI_LINE5, EXTI_Callback);`:注册中断回调函数,当EXTI_LINE5发生中断时,将调用EXTI_Callback函数。
**2.2 定时器**
**2.2.1 定时器基本原理**
定时器是STM32单片机中用于生成精确时间间隔或脉冲的通用外设。STM32单片机提供了多种定时器类型,包括通用定时器、基本定时器、高级定时器等。定时器可以用于各种应用,如延时、PWM生成、捕获/比较等。
**2.2.2 定时器模式和应用**
STM32单片机定时器支持多种工作模式,包括计数模式、捕获模式、比较模式等。不同的模式可以满足不同的应用需求。
**表格:STM32单片机定时器模式**
| 模式 | 描述 | 应用 |
|---|---|---|
| 计数模式 | 定时器递增或递减计数 | 延时、频率测量 |
| 捕获模式 | 捕获外部事件的发生时间 | 测量脉冲宽度、相位差 |
| 比较模式 | 当计数器达到指定值时产生中断 | PWM生成、脉冲调制 |
**代码块:**
```c
// 配置TIM2为计数模式
TIM_HandleTypeDef htim2;
htim2.Instance = TIM2;
htim2.Init.Prescaler = 8400 - 1; // 分频系数为8400
htim2.Init.CounterMode = TIM_COUNTERMODE_UP; // 计数模式为向上计数
htim2.Init.Period = 1000 - 1; // 计数周期为1000
HAL_TIM_Base_Init(&htim2);
// 启动TIM2
HAL_TIM_Base_Start(&htim2);
```
**逻辑分析:**
* `TIM_HandleTypeDef htim2;`:定义TIM2定时器句柄变量。
* `htim2.Instance = TIM2;`:设置定时器实例为TIM2。
* `htim2.Init.Prescaler = 8400 - 1;`:设置定时器分频系数为8400。
* `htim2.Init.CounterMode = TIM_COUNTERMODE_UP;`:设置定时器计数模式为向上计数。
* `htim2.Init.Period = 1000 - 1;`:设置定时器计数周期为1000。
* `HAL_TIM_Base_Init(&htim2);`:使用HAL库初始化TIM2定时器。
* `HAL_TIM_Base_Start(&htim2);`:启动TIM2定时器。
# 3. 通信外设**
通信外设是STM32单片机中不可或缺的一部分,它们负责与外部设备进行数据交换。本章节将介绍STM32单片机中的三种主要通信外设:串口通信、I2C总线和SPI总线。
**3.1 串口通信**
串口通信是一种异步通信协议,它使用一对数据线(TXD和RXD)进行单向数据传输。串口通信具有以下特点:
- **简单易用:**串口通信的硬件和软件实现都非常简单。
- **低成本:**串口通信需要的硬件成本很低。
- **广泛应用:**串口通信广泛应用于各种嵌入式系统中,如调试、数据传输和设备控制。
**3.1.1 串口通信原理**
串口通信的基本原理是通过发送和接收串行数据位来实现数据传输。每个数据位由一个起始位、数据位、奇偶校验位和一个停止位组成。
- **起始位:**一个低电平信号,表示数据传输的开始。
- **数据位:**传输的数据信息,通常为8位或16位。
- **奇偶校验位:**用于检测数据传输中的错误,可以是奇校验或偶校验。
- **停止位:**一个高电平信号,表示数据传输的结束。
**3.1.2 STM32串口配置和使用**
STM32单片机提供了多个串口外设,可以通过寄存器配置和操作来实现串口通信。串口配置主要包括以下步骤:
1. **使能串口时钟:**在RCC寄存器中使能串口时钟。
2. **配置串口引脚:**将GPIO引脚配置为串口功能,通常使用GPIOx_AFRx寄存器。
3. **设置串口波特率:**通过串口外设的波特率寄存器(BRR)设置波特率。
4. **配置数据格式:**通过串口外设的数据格式寄存器(CR1)设置数据位、奇偶校验和停止位。
5. **使能串口:**通过串口外设的控制寄存器(CR1)使能串口。
以下代码示例展示了如何配置STM32单片机的串口USART1:
```c
// 使能串口1时钟
RCC->APB2ENR |= RCC_APB2ENR_USART1EN;
// 配置串口1引脚
GPIOA->AFR[1] |= GPIO_AFRH_AF7_USART1;
// 设置串口1波特率为9600
USART1->BRR = 0x341;
// 配置串口1数据格式为8位、无奇偶校验、1个停止位
USART1->CR1 = USART_CR1_TE | USART_CR1_RE | USART_CR1_8M;
// 使能串口1
USART1->CR1 |= USART_CR1_UE;
```
**3.2 I2C总线**
I2C总线是一种串行通信协议,它使用两条数据线(SDA和SCL)进行双向数据传输。I2C总线具有以下特点:
- **多主从模式:**I2C总线支持多个主设备和多个从设备同时连接。
- **地址寻址:**每个从设备都有一个唯一的地址,主设备可以通过地址寻址特定的从设备。
- **数据传输速率低:**I2C总线的数据传输速率通常较低,一般在100kbps以内。
**3.2.1 I2C总线原理**
I2C总线的数据传输过程由主设备发起,主设备通过发送起始信号开始数据传输,然后发送从设备地址和读/写命令。从设备收到地址和命令后,如果地址匹配,则会响应主设备的请求,并进行数据传输。
**3.2.2 STM32 I2C配置和使用**
STM32单片机提供了多个I2C外设,可以通过寄存器配置和操作来实现I2C通信。I2C配置主要包括以下步骤:
1. **使能I2C时钟:**在RCC寄存器中使能I2C时钟。
2. **配置I2C引脚:**将GPIO引脚配置为I2C功能,通常使用GPIOx_AFRx寄存器。
3. **设置I2C波特率:**通过I2C外设的波特率寄存器(CCR)设置波特率。
4. **配置I2C模式:**通过I2C外设的控制寄存器(CR1)配置I2C模式,如主模式或从模式。
5. **使能I2C:**通过I2C外设的控制寄存器(CR1)使能I2C。
以下代码示例展示了如何配置STM32单片机的I2C外设I2C1为从模式:
```c
// 使能I2C1时钟
RCC->APB1ENR |= RCC_APB1ENR_I2C1EN;
// 配置I2C1引脚
GPIOB->AFR[1] |= GPIO_AFRH_AF4_I2C1;
// 设置I2C1波特率为100kbps
I2C1->CCR = 0x28;
// 配置I2C1为从模式
I2C1->CR1 = I2C_CR1_PE;
// 设置从设备地址为0x5A
I2C1->OAR1 = 0x5A;
// 使能I2C1
I2C1->CR1 |= I2C_CR1_PE;
```
**3.3 SPI总线**
SPI总线是一种高速同步通信协议,它使用四条数据线(SCK、MOSI、MISO和SS)进行全双工数据传输。SPI总线具有以下特点:
- **高速数据传输:**SPI总线的数据传输速率可以达到数十MHz。
- **主从模式:**SPI总线支持单主多从模式,一个主设备可以连接多个从设备。
- **数据格式灵活:**SPI总线支持多种数据格式,如8位、16位和32位。
**3.3.1 SPI总线原理**
SPI总线的数据传输过程由主设备发起,主设备通过发送时钟信号(SCK)同步数据传输。主设备通过MOSI线发送数据,从设备通过MISO线接收数据。SS线用于片选从设备,只有被片选的从设备才能参与数据传输。
**3.3.2 STM32 SPI配置和使用**
STM32单片机提供了多个SPI外设,可以通过寄存器配置和操作来实现SPI通信。SPI配置主要包括以下步骤:
1. **使能SPI时钟:**在RCC寄存器中使能SPI时钟。
2. **配置SPI引脚:**将GPIO引脚配置为SPI功能,通常使用GPIOx_AFRx寄存器。
3. **设置SPI波特率:**通过SPI外设的波特率寄存器(BR)设置波特率。
4. **配置SPI模式:**通过SPI外设的控制寄存器(CR1)配置SPI模式,如主模式或从模式。
5. **使能SPI:**通过SPI外设的控制寄存器(CR1)使能SPI。
以下代码示例展示了如何配置STM32单片机的SPI外设SPI1为主模式:
```c
// 使能SPI1时钟
RCC->APB2ENR |= RCC_APB2ENR_SPI1EN;
// 配置SPI1引脚
GPIOA->AFR[0] |= GPIO_AFRL_AF5_SPI1;
// 设置SPI1波特率为1MHz
SPI1->CR1 = SPI_CR1_BR_2;
// 配置SPI1为主模式
SPI1->CR1 |= SPI_CR1_MSTR;
// 使能SPI1
SPI1->CR1 |= SPI_CR1_SPE;
```
# 4. 高级外设**
**4.1 直接存储器访问(DMA)**
**4.1.1 DMA基本原理**
DMA(Direct Memory Access)是一种硬件机制,允许外设直接访问系统内存,而无需CPU的干预。这可以显著提高数据传输速度,特别是对于大数据量传输的情况。
DMA控制器负责管理数据传输,它从外设接收数据请求,并根据预先配置的传输参数,将数据从外设缓冲区传输到内存或从内存传输到外设缓冲区。
**4.1.2 STM32 DMA配置和使用**
STM32单片机提供了多个DMA控制器,每个控制器可以管理多个DMA通道。DMA通道可以配置为传输各种类型的数据,包括字节、半字和字。
配置DMA通道需要以下步骤:
1. **选择DMA控制器和通道:**确定要使用的DMA控制器和通道。
2. **配置DMA源和目标地址:**指定数据源地址(外设缓冲区)和目标地址(内存地址)。
3. **设置传输数据量:**指定要传输的数据量。
4. **设置传输模式:**选择数据传输模式,例如单次传输、循环传输或乒乓传输。
5. **启用DMA通道:**启动DMA传输。
**代码示例:**
```c
#include "stm32f10x.h"
int main() {
// 初始化DMA控制器和通道
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
DMA_InitTypeDef DMA_InitStructure;
DMA_InitStructure.DMA_Channel = DMA_Channel_1;
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&USART1->DR;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)data;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralToMemory;
DMA_InitStructure.DMA_BufferSize = 100;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA1_Channel1, &DMA_InitStructure);
// 启用DMA通道
DMA_Cmd(DMA1_Channel1, ENABLE);
// 启动数据传输
USART_DMACmd(USART1, USART_DMAReq_Tx, ENABLE);
return 0;
}
```
**逻辑分析:**
这段代码配置DMA通道1,将USART1外设缓冲区中的数据传输到内存地址data中。DMA控制器将自动处理数据传输,无需CPU干预。
**参数说明:**
* `DMA_Channel_1`:选择DMA通道1。
* `(uint32_t)&USART1->DR`:USART1外设缓冲区地址。
* `(uint32_t)data`:内存地址。
* `DMA_DIR_PeripheralToMemory`:数据传输方向为从外设到内存。
* `100`:传输数据量为100字节。
* `DMA_PeripheralInc_Disable`:外设缓冲区地址不递增。
* `DMA_MemoryInc_Enable`:内存地址递增。
* `DMA_PeripheralDataSize_Byte`:外设缓冲区数据大小为字节。
* `DMA_MemoryDataSize_Byte`:内存数据大小为字节。
* `DMA_Mode_Normal`:正常传输模式。
* `DMA_Priority_High`:高优先级。
* `DMA_M2M_Disable`:非内存到内存传输。
# 5. 外设应用实例
### 5.1 GPIO控制LED闪烁
**目的:**使用GPIO控制LED闪烁,实现简单的输出功能。
**步骤:**
1. **配置GPIO引脚:**
- 使用 `RCC_AHB1PeriphClockCmd` 函数使能GPIO时钟。
- 使用 `GPIO_InitTypeDef` 结构体配置GPIO引脚。
- 调用 `GPIO_Init` 函数初始化GPIO引脚。
```c
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
```
2. **控制LED闪烁:**
- 使用 `GPIO_SetBits` 和 `GPIO_ResetBits` 函数控制GPIO引脚输出高电平或低电平。
- 使用 `HAL_Delay` 函数延时一段时间。
```c
while (1) {
GPIO_SetBits(GPIOA, GPIO_Pin_5);
HAL_Delay(500);
GPIO_ResetBits(GPIOA, GPIO_Pin_5);
HAL_Delay(500);
}
```
### 5.2 定时器生成PWM波形
**目的:**使用定时器生成PWM波形,实现LED亮度调节。
**步骤:**
1. **配置定时器:**
- 使用 `RCC_APB1PeriphClockCmd` 函数使能定时器时钟。
- 使用 `TIM_TimeBaseInitTypeDef` 结构体配置定时器基本参数。
- 调用 `TIM_TimeBaseInit` 函数初始化定时器。
```c
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_Prescaler = 72 - 1;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_Period = 1000 - 1;
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStruct);
```
2. **配置PWM输出:**
- 使用 `TIM_OCInitTypeDef` 结构体配置PWM输出通道。
- 调用 `TIM_OCInit` 函数初始化PWM输出通道。
```c
TIM_OCInitTypeDef TIM_OCInitStruct;
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse = 500;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM2, &TIM_OCInitStruct);
```
3. **启动定时器:**
- 调用 `TIM_Cmd` 函数启动定时器。
```c
TIM_Cmd(TIM2, ENABLE);
```
### 5.3 串口通信发送和接收数据
**目的:**使用串口进行通信,实现数据的发送和接收。
**步骤:**
1. **配置串口:**
- 使用 `RCC_APB1PeriphClockCmd` 函数使能串口时钟。
- 使用 `USART_InitTypeDef` 结构体配置串口参数。
- 调用 `USART_Init` 函数初始化串口。
```c
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2, &USART_InitStruct);
```
2. **发送数据:**
- 使用 `USART_SendData` 函数发送数据。
```c
USART_SendData(USART2, 'A');
```
3. **接收数据:**
- 使用 `USART_ReceiveData` 函数接收数据。
```c
uint8_t data = USART_ReceiveData(USART2);
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 STM32 和 51 单片机的方方面面,涵盖了性能、架构、应用场景、指令集、编程技巧、外设解析、中断处理、通信接口、实时操作系统、定时器应用、ADC 详解、看门狗定时器、CAN 总线应用、单总线应用、DMA 传输、中断嵌套处理、GPIO 编程技巧、定时器应用案例、I2C 总线应用和单总线应用案例。通过权威解读、深入剖析和实战演练,本专栏旨在帮助读者全面掌握这些单片机的特性、工作原理和应用技术,从而提升嵌入式系统开发能力。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【el-select默认值禁用解法】:掌握这些技巧,解锁新自由

# 摘要
本文详尽探讨了Vue.js中el-select组件的使用方法,重点分析了实现默认值及其常见问题,并提供了相应的解决方案。文章从组件的基本用法入手,深入到默认值的处理机制,探讨了实现和禁用问题的原因,并结合实际开发案例提供了多种解决默认值不可更改问题的技术手段。此外,本文还深入解读了el-select的高级特性,例如v
图算法与动态规划:程序员面试高级技巧全解析
# 摘要
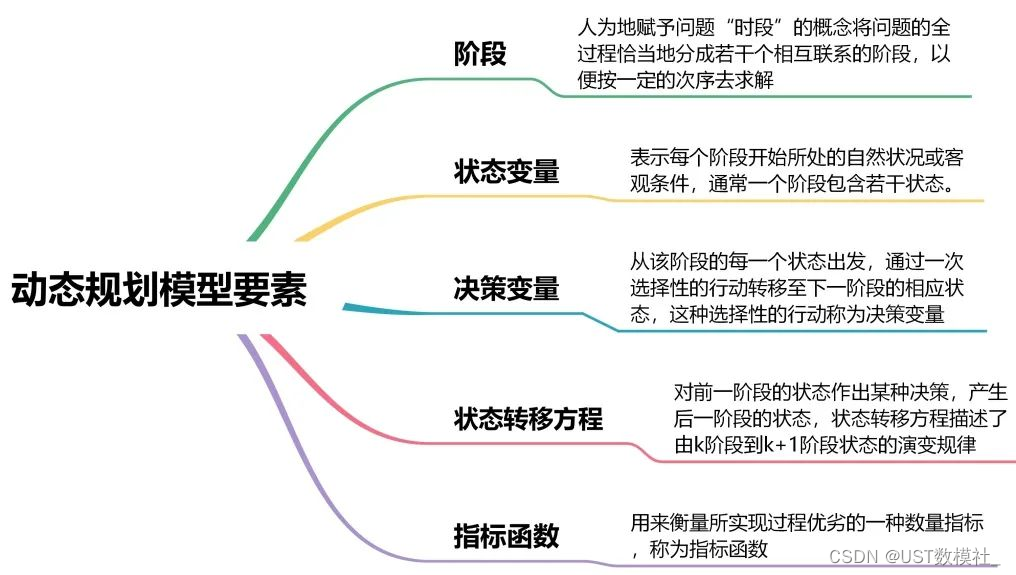
本论文首先介绍了图算法和动态规划的基础知识,为后续章节提供必要的理论支持。随后,文章深入探讨了动态规划的理论基础,包括其定义、特点、问题结构分析以及解题步骤。第三章重点阐述了图算法在动态规划中的应用,包括图的表示方法和图算法与动态规划结合的优化技巧。在介绍高级图算法与优化技巧之后,第五章针对性地解析了面试中图算法与动态规划的问题,提供了面试准备策略、真题分析以及实战演练,并分享了面试经验和持续学习的建议
SAP JCO3应用案例分析:最佳实践与成功秘诀
# 摘要
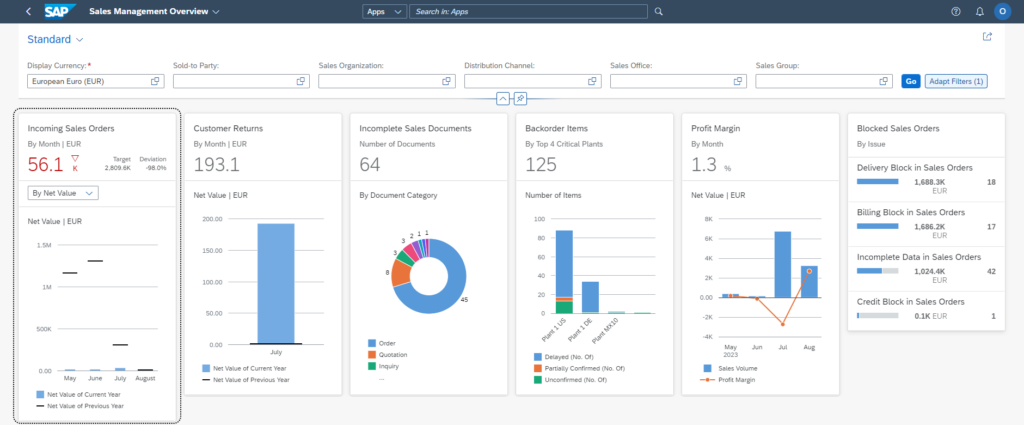
本文深入探讨了SAP JCO3技术的全面概览、核心组件架构、集成实践案例、优化与维护策略,以及未来发展趋势。SAP JCO3作为关键的技术组件,为ERP系统集成和各业务流程自动化提供了强大的支撑。文章首先介绍了SAP JCO3的基本概念和核心组件,随后详细阐述了连接管理、通信处理、接口和协议的应用。进一步地,通过集成实践案例,展示了SAP JCO3在ERP、
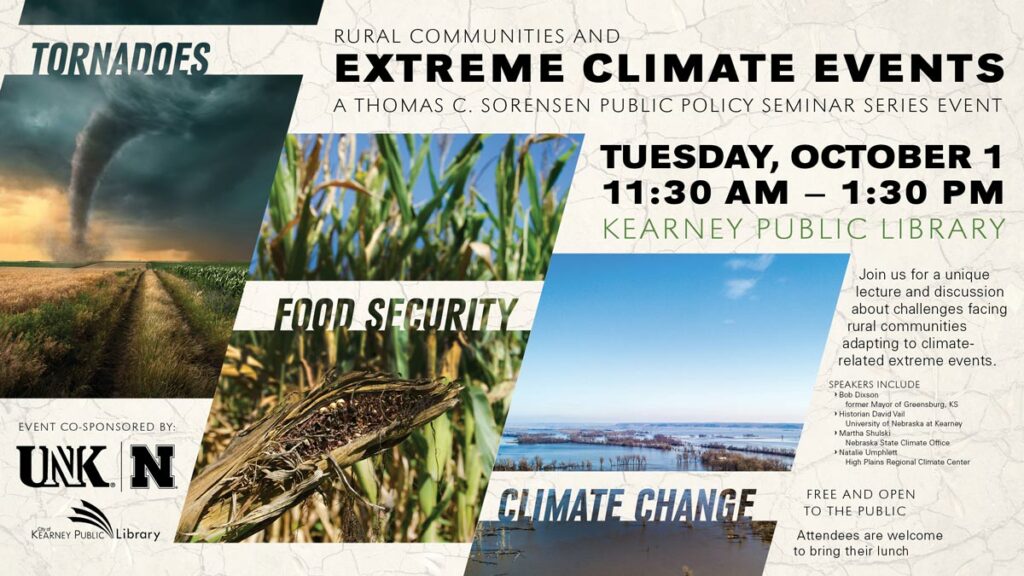
AnyLogic在环境科学中的应用:气候变化与生态平衡的模拟探索
# 摘要
本文探讨了AnyLogic平台在环境科学中的应用,特别强调了其在气候和生态模型构建方面的多方法建模能力。通过对比分析,本文阐述了AnyLogic在环境模型软件中的独特性,包括系统动力学模型、离散事件模型和代理基模型等。文章还详细介绍了AnyLogic的操
【Aspen物性参数设置】:自定义参数的全面解析与设置技巧

# 摘要
本文旨在深入探讨Aspen物性参数设置的全过程,包括理论基础、实践技巧以及高级应用。首先介绍了物性参数的概念、分类以及其在模拟过程中的重要性,随后详细阐述了物性模型的
FT2000-4 BIOS跨平台编译:Linux与Windows环境的终极对比指南
# 摘要
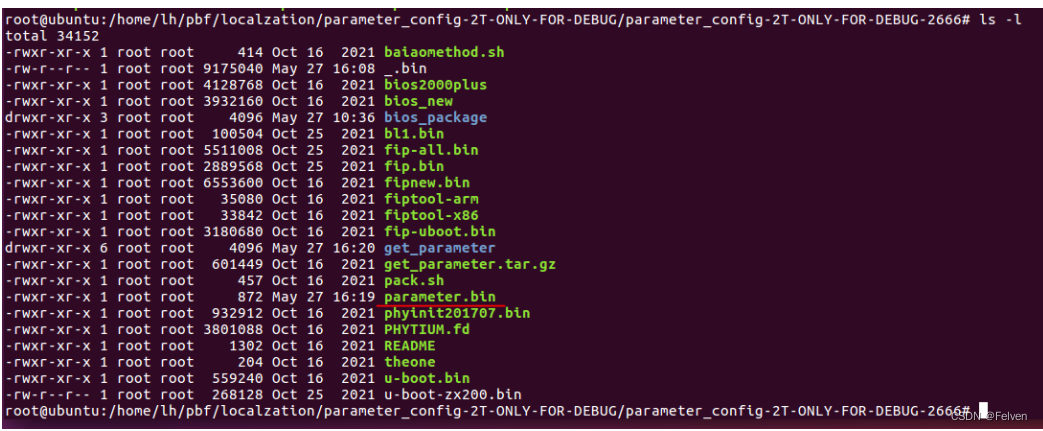
本文详细介绍了FT2000-4 BIOS跨平台编译的理论与实践,对比分析了Linux与Windows环境下的编译流程、工具链差异、依赖管理、编译效率和输出文件兼容性。通过系统性地阐述BIOS源码结构解析、编译选项配置、调试优化过程,我们深入探讨了构建系统优化、故障排除技巧以及编译安全性和代码质量保证措施。最终,本文展望了跨平台编译技术的发展趋势,包括新兴技术的应用和编译器的演进,为跨平台软件开发提供
华为质量门事件深度剖析:从挑战到成功的转型之路
# 摘要
华为质量门事件揭示了企业在高速发展中面临的技术挑战和质量控制难题。本文首先概述了事件的起因、表现及其对华为品牌的冲击,随后深入分析了华为的应对策略和技术挑战,包括内部质量控制流程的审查与改进,以及技术创新和研发策略的调整。接着,本文从危机管理理论和企业转型的视角出发,探讨了华为如何通过理论指导实践,实施组织变革并
【Python异常处理指南】:从新手到专家的进阶教程
# 摘要
本文详细探讨了Python中的异常处理机制,从基础概念到深入解析,再到项目中的实际应用。首先介绍了异常处理的基础知识,包括异常类型和层次结构,以及最佳实践。随后,文章深入解析了异常捕获的高级用法,例如else和finally子句的使用,以及
【Java操作Excel的终极指南】:POI基础入门到性能优化
# 摘要
本文旨在详细介绍Java操作Excel文件的全面技术要点,从基础操作到高级技巧,再到性能优化与实践案例。首先,文章概述了Java操作Excel的基础知识,并重点介绍了Apache POI库的使用,包括其安装、版本特性、以及如何读写Excel文件和处理数据。接着,文章探讨了处理复杂数据结构、公式、函数以及高性能数据处理的方
Cadence Sigrity PowerDC电源完整性测试:专家级指南与案例分析
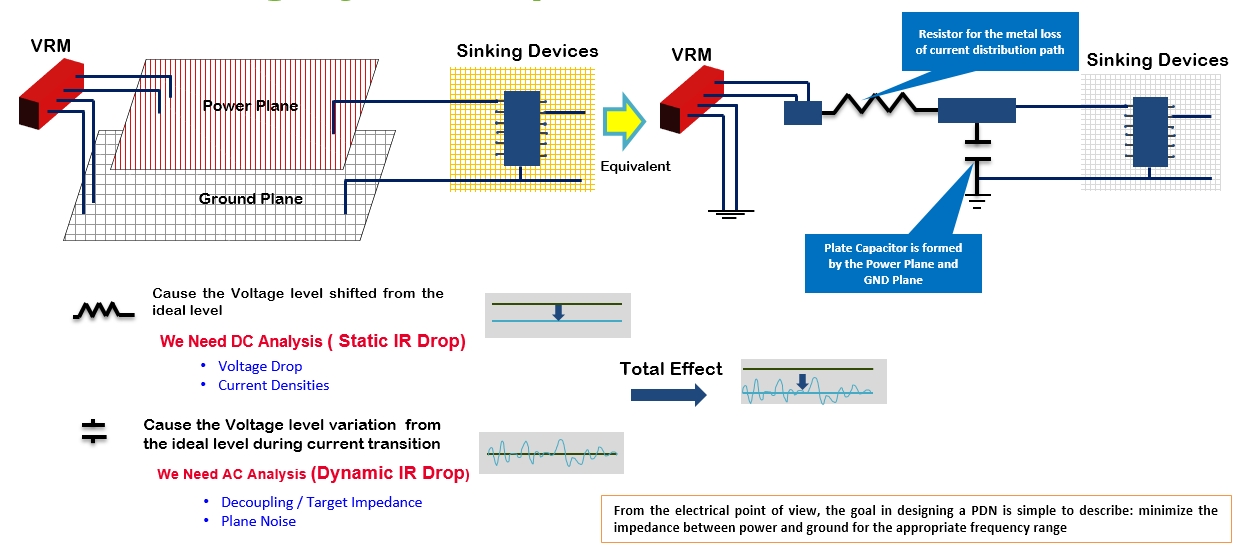
# 摘要
本文对Cadence Sigrity PowerDC及其在电源完整性分析中的应用进行了全面介绍。首先概述了电源完整性的重要性以及相关理论基础,重点分析了电源噪声和电磁干扰、电源网络建模理论、阻抗控制以及信号与电源完整性之间的相互作用。随后介绍了Cadence Sigrity PowerDC工具的功能、数据准备、仿真设
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )