传递函数绘制与分析:揭示控制系统动态特性的秘密
发布时间: 2024-07-05 01:02:55 阅读量: 106 订阅数: 50 

控制系统仿真与CAD:第4章 线性控制系统的计算机辅助分析.ppt
# 1. 传递函数基础
传递函数是表征线性时不变 (LTI) 系统在频域特性的数学工具。它描述了系统输出与输入之间的关系,有助于分析系统的稳定性、性能和设计。
传递函数通常表示为:
```
H(s) = Y(s) / X(s)
```
其中:
* H(s) 是传递函数
* Y(s) 是系统的输出信号的拉普拉斯变换
* X(s) 是系统的输入信号的拉普拉斯变换
* s 是拉普拉斯变换的复变量
# 2. 传递函数分析
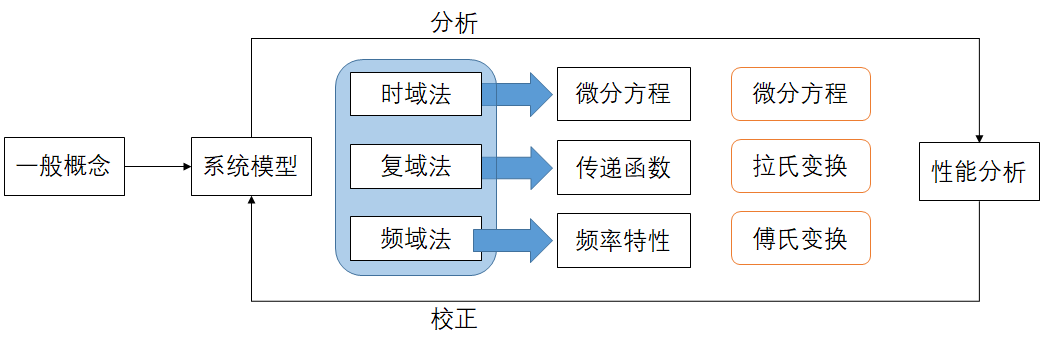
传递函数分析是研究传递函数的特性和行为,以了解系统在不同输入信号下的响应。传递函数分析分为时域分析和频域分析两种方法。
### 2.1 时域分析
时域分析研究传递函数在时域中的响应,即系统对输入信号的直接响应。
#### 2.1.1 时域响应的获取方法
时域响应可以通过以下方法获取:
- **单位阶跃响应:**将输入信号设置为单位阶跃函数,即在时刻 t=0 之前为 0,在 t=0 时刻突变为 1。系统的时域响应即为单位阶跃响应。
- **单位冲激响应:**将输入信号设置为单位冲激函数,即在时刻 t=0 时刻为无穷大,其他时刻为 0。系统的时域响应即为单位冲激响应。
#### 2.1.2 时域响应的分析和解读
时域响应可以提供以下信息:
- **上升时间:**系统从 10% 上升到 90% 输出值所需的时间。
- **下降时间:**系统从 90% 下降到 10% 输出值所需的时间。
- **峰值时间:**系统输出达到峰值所需的时间。
- **峰值幅度:**系统输出的峰值幅度。
- **稳定时间:**系统输出稳定在最终值附近所需的时间。
### 2.2 频域分析
频域分析研究传递函数在频域中的响应,即系统对不同频率输入信号的响应。
#### 2.2.1 傅里叶变换和拉普拉斯变换
频域分析使用傅里叶变换或拉普拉斯变换将时域信号转换为频域信号。
- **傅里叶变换:**将时域信号转换为频率域信号,其中频率为实数。
- **拉普拉斯变换:**将时域信号转换为复频域信号,其中频率为复数。
#### 2.2.2 频率响应的获取和解读
频率响应可以通过以下方法获取:
- **幅频响应:**表示传递函数在不同频率下的幅度变化。
- **相频响应:**表示传递函数在不同频率下的相位变化。
频率响应可以提供以下信息:
- **截止频率:**传递函数幅度衰减到 3dB 时的频率。
- **共振频率:**传递函数幅度达到峰值的频率。
- **相位裕度:**传递函数相位在截止频率处的裕度。
- **增益裕度:**传递函数幅度在截止频率处的裕度。
# 3.1 绘制传递函数幅频响应
#### 3.1.1 Bode图的绘制方法
Bode图是一种半对数坐标图,横轴表示频率,纵轴表示幅值(增益)和相位。绘制Bode图时,需要将传递函数化简为标准形式:
```
G(s) = K * (s^n / (s^m + a_1s^(m-1) + ... + a_m))
```
其中,K为增益,n和m为整数,a_i为常数。
根据传递函数的标准形式,可以绘制Bode图的幅频响应:
- **低频段(ω << 1):**当频率远小于极点时,传递函数的幅值约为K。
- **高频段(ω >> 1):**当频率远大于零点时,传递函数的幅值约为K * (ω^n / ω^m) = K * ω^(n-m)。
- **拐点频率:**当频率等于极点或零点时,传递函数的幅值发生20dB/decade的下降或上升。
#### 3.1.2 Bode图的解读和应用
Bode图可以用来分析传递函数的幅频特性,包括:
- **增益:**Bode图的幅值曲线表示传递函数的增益,可以看出系统在不同频率下的放大或衰减程度。
- **带宽:**Bode图的幅值曲线与0dB线相交的频率称为带宽,表示系统能够有效传递信号的频率范围。
- **共振频率:**对于具有复数极点的传递函数,Bode图的幅值曲线会出现峰值,峰值对应的频率称为共振频率。
- **稳定性:**Bode图可以用来判断系统的稳定性。如果幅值曲线在0dB线以下有相交点,则系统不稳定。
# 4. 传递函数综合应用
### 4.1 控制系统稳定性分析
#### 4.1.1 奈奎斯特稳定判据
奈奎斯特稳定判据是一种图形化的方法,用于判断控制系统的稳定性。该判据基于闭环传递函数的奈奎斯特图,即闭环传递函数幅频响应和相频响应在复平面上绘制的曲线。
**奈奎斯特稳定判据的步骤:**
1. 绘制闭环传递函数的奈奎斯特图。
2. 确定开环传递函数的极点和零点。
3. 沿单位圆逆时针方向移动,计算奈奎斯特图与实轴的交点数量。
4. 如果奈奎斯特图与实轴的交点数量等于开环传递函数极点的数量,则系统稳定。
5. 如果奈奎斯特图与实轴的交点数量大于开环传递函数极点的数量,则系统不稳定。
**代码示例:**
```python
import numpy as np
import ma
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
“传递函数宝典”专栏深入剖析了传递函数在控制系统、电力系统、机械工程、航空航天、机器人控制、生物医学工程、经济学、金融工程、信号处理、图像处理、语音处理、通信系统和计算机网络等领域的广泛应用。从基础概念到高级应用,专栏以清晰易懂的方式揭示了传递函数在系统分析、设计和优化中的关键作用。通过深入探讨传递函数与系统响应、稳定性、PID控制、现代控制理论、振动分析、飞行控制、生理系统建模、宏观经济模型、风险评估、滤波、图像增强、语音识别、调制和网络性能分析之间的关联,专栏为读者提供了全面了解传递函数在各个领域的价值和应用的宝贵资源。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【数据持久化策略】:3招确保Docker数据卷管理的高效性

# 摘要
数据持久化是确保数据在软件生命周期中保持一致性和可访问性的关键策略。本文首先概述了数据持久化的基础策略,并深入探讨了Docker作为容器化技术在数据持久化中的作用和机制。章节二分析了Docker容器与数据持久化的关联,包括容器的短暂性、Docker镜像与容器的区别,以及数据卷的类型和作用。章节三着重于实践层面,
HoneyWell PHD数据库驱动:一站式配置与故障排除详解

# 摘要
HoneyWell PHD数据库驱动作为工业自动化领域的重要组件,对系统的稳定性与性能起着关键作用。本文首先介绍了该驱动的概况及其配置方法,包括环境搭建、数据库连接和高级配置技巧。随后,深入探讨了该驱动在实践应用中的日志管理、故障诊断与恢复以及高级场景的应用探索。文中还提供了详细的故障排除方法,涵盖问题定位、性能优化和安全漏洞管理。最后,展望了HoneyWell PHD数据库
频域辨识技巧大公开
# 摘要
频域辨识技术作为系统分析的重要方法,在工程系统、控制系统和信号处理领域中发挥着关键作用。本文首先概述了频域辨识技术及其基础理论,强调了频域与时域的转换方法和辨识模型的数学基础。随后,文章探讨了频域辨识的实践方法,包括工具使用、实验设计、数据采集和信号分析等关键环节。通过分析
【跨平台WebView应用开发】:实现一个高效可复用的HTML内容展示框架

# 摘要
本文对跨平台WebView应用开发进行了全面探讨,涵盖了从理论基础到技术选型、核心框架构建、功能模块开发以及框架实践与案例分析的全过程。首先介绍了跨平台开发框架的选择与WebView技术原理,然后深入解析了如何构建高效的核心框架,包括HTML内容展示、资源管
Local-Bus总线兼容性解决方案:确保系统稳定运行
# 摘要
Local-Bus总线技术作为一种早期的高速数据传输接口,在计算机硬件领域中扮演了重要角色。本文旨在探讨Local-Bus总线技术的兼容性问题及其影响,通过分析其工作原理、硬件与软件层面的兼容性挑战,总结了诊断和解决兼容性问题的实践策略。在此基础上,文章探讨了保持Local-Bus总线系统稳定运行的关键措施,包括系统监控、故障恢复以及性
递归算法揭秘:课后习题中的隐藏高手
# 摘要
递归算法作为计算机科学中的基础概念和核心技术,贯穿于理论与实际应用的多个层面。本文首先介绍了递归算法的理论基础和核心原理,包括其数学定义、工作原理以及与迭代算法的关系
【雷达信号处理:MATLAB仿真秘籍】
# 摘要
本文首先介绍雷达信号处理的基础知识,随后深入探讨MATLAB在该领域的应用,包括软件环境的搭建、信号生成与模拟、信号处理工具箱的使用等。接着,文章详细阐述了雷达波形设计、信号检测与跟踪、以及雷达信号的成像处理等实践操作。此外,本文还涵盖了一些高级技巧,如MIMO雷达信号处理、自适应信号处理技术,以及GPU加速处理在雷达信号处理中的应用。最后,通过实际案例分析,展示雷达信号
Zkteco智慧系统E-ZKEco Pro安装详解:新手到专家的快速通道
# 摘要
本文全面介绍了E-ZKEco Pro系统的概览、安装、配置、优化及故障排除的全过程。首先概述了系统的架构和特点,然后详述了安装前的准备,包括硬件、软件的要求与兼容性以及安装介质的准备和校验。在系统安装部分,本文指导了全新安装和系统升级的具体步骤,并对多节点部署和集群设置进行了阐述。接着,本文深入探讨了系统配置与优化的策略,包括基础设置和性能调优技巧。最后,通过故障排除章节,介绍了常见的问题诊断、数据备份与恢复方法,并对E-ZKEco Pro系统的行业应用案例和未来发展趋势进行了分析,旨在为用户提供一个高效、稳定且可持续发展的系统解决方案。
# 关键字
E-ZKEco Pro系统;系
高级调试与优化技巧:提升Media新CCM18(Modbus-M)安装后性能
# 摘要
本文详细介绍了Media新CCM18(Modbus-M)系统的概览、安装流程、以及与Modbus协议的集成要点和性能评估。文章深入探讨了Modbus协议的基础知识和集成过程,包括硬件集成和软件配置等方面,并通过初步性能基准测试对集成效果进
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )