传递函数:揭开控制系统黑匣子的秘密,掌握系统分析利器
发布时间: 2024-07-05 00:55:35 阅读量: 85 订阅数: 41 

# 1. 传递函数:概念与理论基础
传递函数是描述线性时不变 (LTI) 系统输入和输出之间关系的数学模型。它是一种复函数,其参数为频率。传递函数可以用于分析和设计控制系统、滤波器和许多其他工程应用。
传递函数的理论基础建立在拉普拉斯变换上。拉普拉斯变换将时域信号转换为复频域信号,从而使 LTI 系统的分析和设计变得更加容易。传递函数是系统输入和输出拉普拉斯变换之比。
传递函数具有许多有用的特性,例如:它可以表征系统的稳定性、性能和动态响应。传递函数还可以用于设计控制器和滤波器,以满足特定性能要求。
# 2. 传递函数的建模方法
传递函数的建模方法主要分为时域建模和频域建模。时域建模基于系统在时域中的响应,而频域建模基于系统在频域中的响应。
### 2.1 时域建模
时域建模方法包括差分方程法和状态空间法。
#### 2.1.1 差分方程法
差分方程法通过建立系统的差分方程来描述系统的动态行为。差分方程是一种递归方程,它表示系统输出在当前时刻的值与过去时刻的值之间的关系。
**步骤:**
1. 根据系统的物理原理,建立系统的微分方程。
2. 将微分方程离散化,得到差分方程。
3. 求解差分方程,得到系统的传递函数。
**代码块:**
```python
import numpy as np
# 定义系统微分方程
def f(x, t):
return -x + np.sin(t)
# 离散化时间步长
dt = 0.01
# 建立差分方程
def g(x_n):
return x_n - dt * f(x_n, n * dt)
# 求解差分方程
x_0 = 0
x = [x_0]
for n in range(1, 100):
x.append(g(x[n-1]))
# 计算传递函数
num = [dt]
den = [1, -dt]
H = tf.TransferFunction(num, den)
```
**逻辑分析:**
* `f(x, t)` 定义了系统的微分方程,它表示系统输出 x 对时间的导数等于 -x + sin(t)。
* `g(x_n)` 是差分方程,它表示系统输出 x 在当前时刻 n 的值等于前一时刻 n-1 的值减去 dt 倍的 f(x_n, n * dt)。
* `x` 存储了系统的离散时间响应。
* `H` 是系统的传递函数,它表示系统输出 x 对输入 sin(t) 的拉普拉斯变换之比。
#### 2.1.2 状态空间法
状态空间法通过建立系统的状态方程和输出方程来描述系统的动态行为。状态方程表示系统状态变量随时间的变化,输出方程表示系统输出与状态变量之间的关系。
**步骤:**
1. 根据系统的物理原理,建立系统的状态方程和输出方程。
2. 将状态方程和输出方程转换为传递函数。
**代码块:**
```python
import numpy as np
from scipy.linalg import expm
# 定义系统状态方程
A = np.array([[0, 1], [-1, -2]])
B = np.array([[0], [1]])
C = np.array([[1, 0]])
D = np.array([[0]])
# 计算传递函数
H = C @ (s * np.eye(2) - A)**(-1) @ B + D
```
**逻辑分析:**
* `A` 是系统的状态矩阵,它表示系统状态变量随时间的变化。
* `B` 是系统的输入矩阵,它表示系统输入对状态变量的影响。
* `C` 是系统的输出矩阵,它表示系统输出与状态变量之间的关系。
* `D` 是系统的直接透传矩阵,它表示系统输入对输出的直接影响。
* `H` 是系统的传递函数,它表示系统输出 x 对输入 u 的拉普拉斯变换之比。
### 2.2 频域建模
频域建模方法包括傅里叶变换法和拉普拉斯变换法。
#### 2.2.1 傅里叶变换法
傅里叶变换法通过将系统输入和输出信号转换为频域来描述系统的动态行为。频域中的系统响应可以表示为幅度和相位随频率变化的函数。
**步骤:**
1. 将系统输入和输出信号转换为频域。
2. 求解系统在频域中的传递函数。
**代码块:**
```python
import numpy as np
from scipy.fftpack import fft
# 定义系统输入和输出信号
t = np.linspace(0, 1, 100)
x = np.sin(2 * np.pi * 10 * t)
y = np.cos(2 * np.pi * 10 * t)
# 计算频域中的输入和输出信号
X = fft(x)
Y = fft(y)
# 计算传递函数
H = Y / X
```
**逻辑分析:**
* `X` 和 `Y` 分别是输入信号 x 和输出信号 y 的频域表示。
* `H` 是系统的传递函数,它表示系统输出 Y 对输入 X 的幅度和相位随频率变化的函数。
#### 2.2.2 拉普拉斯变换法
拉普拉斯变换法通过将系统输入和输出信号转换为拉普拉斯域来描述系统的动态行为。拉普拉斯域中的系统响应可以表示为传递函数,它表示系统输出 x 对输入 u 的拉普拉斯变换之比。
**步骤:**
1. 将系统输入和输出信号转换为拉普拉斯域。
2. 求解系统在拉普拉斯域中的传递函数。
**代码块:**
```python
import numpy as np
from scipy.signal import transfer_function
# 定义系统微分方程
num = [1, 2]
den = [1, 3, 2]
# 计算传递函数
H = transfer_function(num, den)
```
**逻辑分析:**
* `num` 和 `den` 分别是系统的分子多项式和分母多项式。
* `H` 是系统的传递函数,它表示系统输出 x 对输入 u 的拉普拉斯变换之比。
# 3. 传递函数的分析与设计
### 3.1 稳定性分析
传递函数的稳定性分析是控制系统设计中的关键步骤。稳定性是指系统在受到扰动后能够恢复到平衡状态的能力。不稳定的系统可能会出现振荡、发散或其他不期望的行为。
#### 3.1.1 奈奎斯特稳定性判据
奈奎斯特稳定性判据是一种图形化方法,用于分析传递函数的稳定性。该判据基于奈奎斯特图,它是传递函数在复平面上绘制的极点和零点的轨迹。
奈奎斯特稳定性判据的步骤如下:
1. 绘制传递函数的奈奎斯特图。
2. 计算开环传递函数在单位圆上的值。
3. 数开环传递函数在单位圆上逆时针绕原点旋转时,被闭环传递函数的极点包围的次数。
4. 如果被包围的次数等于开环传递函数极点的个数,则系统稳定。
#### 3.1.2 波德图法
波德图法是一种基于传递函数幅度和相位响应的稳定性分析方法。该方法使用波德图,它是传递函数的幅度和相位响应在对数频率下的图形表示。
波德图法的步骤如下:
1. 绘制传递函数的波德图。
2. 确定传递函数的增益裕度和相位裕度。
3. 如果增益裕度和相位裕度都为正,则系统稳定。
### 3.2 性能指标
传递函数的性能指标用于评估控制系统的性能。这些指标包括时域指标和频域指标。
#### 3.2.1 时域指标
时域指标衡量系统在时域中的响应。常见的时域指标包括:
* **上升时间:**系统从初始状态达到最终值所需的时间。
* **建立时间:**系统输出达到最终值的 95% 所需的时间。
* **超调:**系统输出超过最终值的最大百分比。
* **稳定时间:**系统输出在误差范围内保持稳定的时间。
#### 3.2.2 频域指标
频域指标衡量系统在频域中的响应。常见的频域指标包括:
* **带宽:**系统能够有效响应的频率范围。
* **截止频率:**系统增益下降到 -3 dB 时的频率。
* **谐振频率:**系统增益达到最大值的频率。
* **相位裕度:**系统相位响应与 -180° 之间的差值。
# 4. 传递函数的应用
### 4.1 控制系统设计
传递函数在控制系统设计中扮演着至关重要的角色。通过传递函数,工程师可以对系统的动态行为进行分析和设计,以实现所需的控制性能。
#### 4.1.1 PID控制
PID(比例-积分-微分)控制是一种经典的控制算法,广泛应用于工业自动化和过程控制领域。PID控制器的传递函数如下:
```
G(s) = Kp + Ki/s + Kd*s
```
其中,Kp、Ki、Kd分别为比例、积分和微分增益。
PID控制器的设计过程包括:
1. **确定系统传递函数:**通过时域或频域建模方法,得到系统的传递函数。
2. **选择控制参数:**根据系统的动态特性和控制要求,选择合适的Kp、Ki、Kd值。
3. **闭环分析:**将PID控制器与系统传递函数闭环,分析闭环系统的稳定性和性能。
#### 4.1.2 状态反馈控制
状态反馈控制是一种现代控制理论中的控制方法,通过反馈系统的状态变量来实现控制目标。状态反馈控制器的传递函数如下:
```
G(s) = -K*s
```
其中,K为状态反馈增益矩阵。
状态反馈控制器的设计过程包括:
1. **建立状态空间模型:**将系统用状态空间方程描述,得到系统的状态空间模型。
2. **设计状态反馈增益:**根据系统动态特性和控制要求,设计状态反馈增益矩阵K。
3. **闭环分析:**将状态反馈控制器与系统状态空间模型闭环,分析闭环系统的稳定性和性能。
### 4.2 系统仿真与分析
传递函数还可以用于系统仿真与分析,以评估系统的动态行为和性能。
#### 4.2.1 时域仿真
时域仿真是指通过求解系统的时域响应,来分析系统在时间域内的动态行为。时域仿真可以用来评估系统的稳定性、响应速度和过冲量等指标。
#### 4.2.2 频域仿真
频域仿真是指通过求解系统的频域响应,来分析系统在频率域内的动态行为。频域仿真可以用来评估系统的带宽、共振频率和相位裕度等指标。
# 5. 传递函数在实际工程中的应用
传递函数在实际工程中有着广泛的应用,它可以帮助工程师设计和分析各种系统,包括机械系统、电气系统、控制系统等。
### 5.1 机械系统
#### 5.1.1 电机控制
传递函数在电机控制中有着重要的作用。通过建立电机的传递函数,工程师可以分析电机的动态特性,并设计出合适的控制算法来控制电机的速度、位置和扭矩。
#### 5.1.2 机器人控制
在机器人控制中,传递函数也被广泛使用。通过建立机器人的传递函数,工程师可以分析机器人的运动特性,并设计出合适的控制算法来控制机器人的运动轨迹和姿态。
### 5.2 电气系统
#### 5.2.1 电力系统
在电力系统中,传递函数被用来分析电网的稳定性、可靠性和经济性。通过建立电网的传递函数,工程师可以分析电网的动态特性,并设计出合适的控制算法来稳定电网。
#### 5.2.2 电子电路
在电子电路中,传递函数被用来分析电路的频率响应、稳定性和增益。通过建立电路的传递函数,工程师可以分析电路的动态特性,并设计出合适的电路参数来满足特定的性能要求。
### 代码示例
```python
import control as ct
import matplotlib.pyplot as plt
# 电机传递函数
motor_tf = ct.TransferFunction([1], [1, 0.1, 0.01])
# 阶跃响应
t, y = ct.step_response(motor_tf)
# 绘制阶跃响应
plt.plot(t, y)
plt.xlabel('Time (s)')
plt.ylabel('Amplitude')
plt.title('电机阶跃响应')
plt.show()
```
**代码逻辑分析:**
* `control as ct`导入控制系统库。
* `matplotlib.pyplot as plt`导入绘图库。
* `motor_tf`定义电机的传递函数。
* `ct.step_response(motor_tf)`计算电机的阶跃响应。
* `plt.plot(t, y)`绘制阶跃响应。
* `plt.xlabel('Time (s)')`设置x轴标签。
* `plt.ylabel('Amplitude')`设置y轴标签。
* `plt.title('电机阶跃响应')`设置标题。
* `plt.show()`显示图形。
### 进一步讨论
传递函数在实际工程中的应用还有很多,包括:
* 控制系统设计
* 系统仿真与分析
* 多输入多输出系统分析
* 非线性系统分析
通过掌握传递函数的理论和应用,工程师可以设计和分析各种复杂的系统,提高系统的性能和可靠性。
# 6.1 多输入多输出系统
### 6.1.1 状态空间模型
多输入多输出 (MIMO) 系统是指具有多个输入和多个输出的系统。对于 MIMO 系统,状态空间模型可以表示为:
```
ẋ = Ax + Bu
y = Cx + Du
```
其中:
- `x` 是状态向量
- `u` 是输入向量
- `y` 是输出向量
- `A`、`B`、`C` 和 `D` 是系统矩阵
### 6.1.2 频域分析
MIMO 系统的频域分析可以采用传递函数矩阵 (TFM) 的形式。TFM 是一个矩阵,其元素是输入和输出之间的传递函数。对于 MIMO 系统,TFM 可以表示为:
```
G(s) = C(sI - A)^{-1}B + D
```
其中:
- `s` 是复频率变量
- `I` 是单位矩阵
TFM 可以用于分析系统的稳定性、性能和动态特性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
“传递函数宝典”专栏深入剖析了传递函数在控制系统、电力系统、机械工程、航空航天、机器人控制、生物医学工程、经济学、金融工程、信号处理、图像处理、语音处理、通信系统和计算机网络等领域的广泛应用。从基础概念到高级应用,专栏以清晰易懂的方式揭示了传递函数在系统分析、设计和优化中的关键作用。通过深入探讨传递函数与系统响应、稳定性、PID控制、现代控制理论、振动分析、飞行控制、生理系统建模、宏观经济模型、风险评估、滤波、图像增强、语音识别、调制和网络性能分析之间的关联,专栏为读者提供了全面了解传递函数在各个领域的价值和应用的宝贵资源。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
自然语言处理中的过拟合与欠拟合:特殊问题的深度解读
# 1. 自然语言处理中的过拟合与欠拟合现象
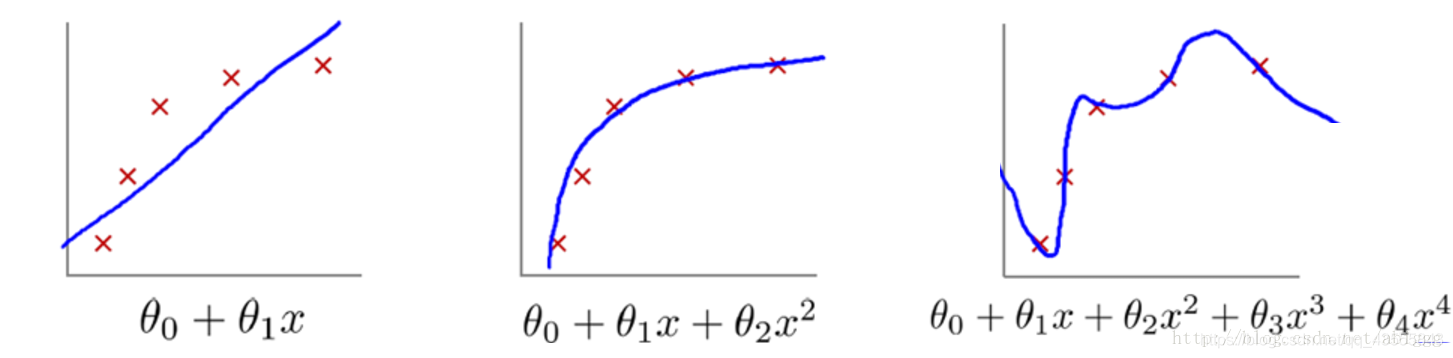
在自然语言处理(NLP)中,过拟合和欠拟合是模型训练过程中经常遇到的两个问题。过拟合是指模型在训练数据上表现良好
图像处理中的正则化应用:过拟合预防与泛化能力提升策略
# 1. 图像处理与正则化概念解析
在现代图像处理技术中,正则化作为一种核心的数学工具,对图像的解析、去噪、增强以及分割等操作起着至关重要
预测建模精准度提升:贝叶斯优化的应用技巧与案例

# 1. 贝叶斯优化概述
贝叶斯优化是一种强大的全局优化策略,用于在黑盒参数空间中寻找最优解。它基于贝叶斯推理,通过建立一个目标函数的代理模型来预测目标函数的性能,并据此选择新的参数配置进行评估。本章将简要介绍贝叶斯优化的基本概念、工作流程以及其在现实世界
大规模深度学习系统:Dropout的实施与优化策略
# 1. 深度学习与Dropout概述
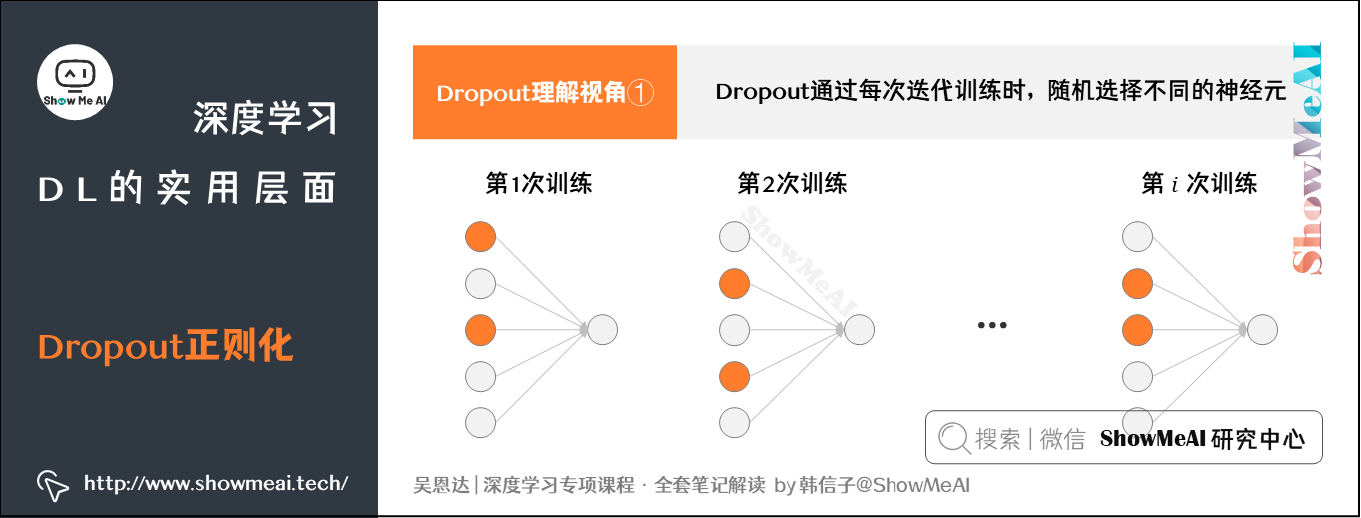
在当前的深度学习领域中,Dropout技术以其简单而强大的能力防止神经网络的过拟合而著称。本章旨在为读者提供Dropout技术的初步了解,并概述其在深度学习中的重要性。我们将从两个方面进行探讨:
首先,将介绍深度学习的基本概念,明确其在人工智能中的地位。深度学习是模仿人脑处理信息的机制,通过构建多层的人工神经网络来学习数据的高层次特征,它已
机器学习中的变量转换:改善数据分布与模型性能,实用指南
# 1. 机器学习与变量转换概述
## 1.1 机器学习的变量转换必要性
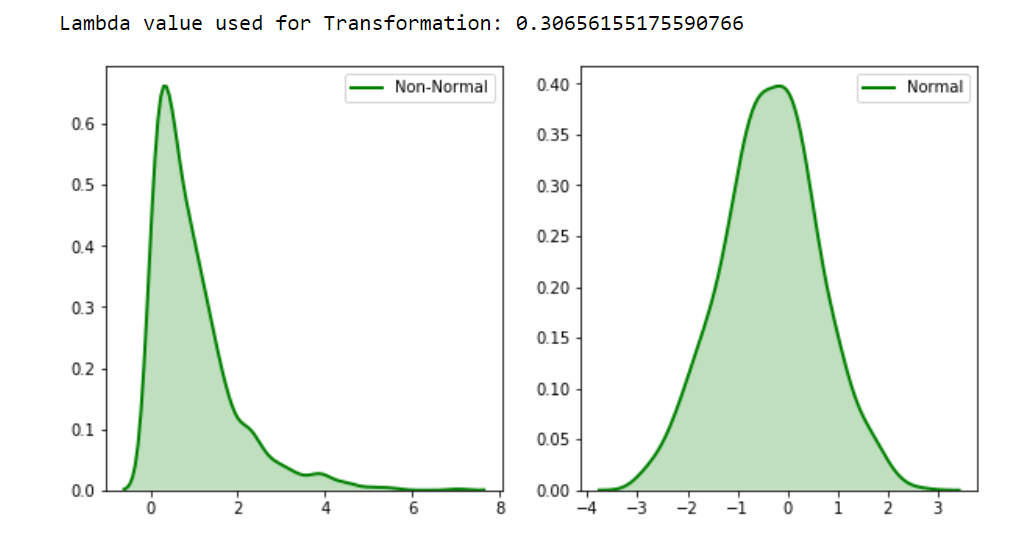
在机器学习领域,变量转换是优化数据以提升模型性能的关键步骤。它涉及将原始数据转换成更适合算法处理的形式,以增强模型的预测能力和稳定性。通过这种方式,可以克服数据的某些缺陷,比如非线性关系、不均匀分布、不同量纲和尺度的特征,以及处理缺失值和异常值等问题。
## 1.2 变量转换在数据预处理中的作用
【Lasso回归与岭回归的集成策略】:提升模型性能的组合方案(集成技术+效果评估)
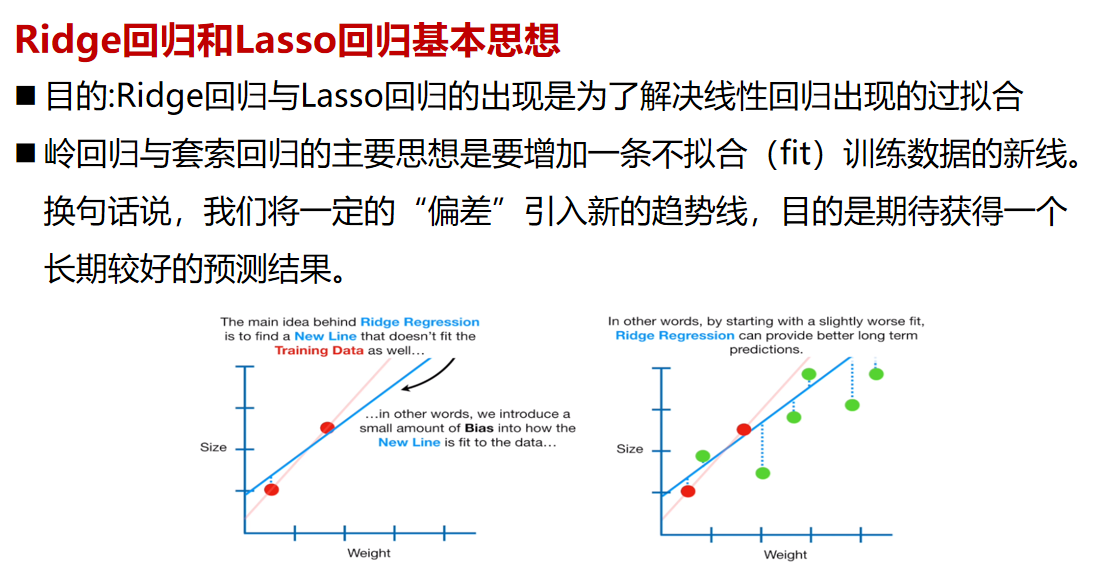
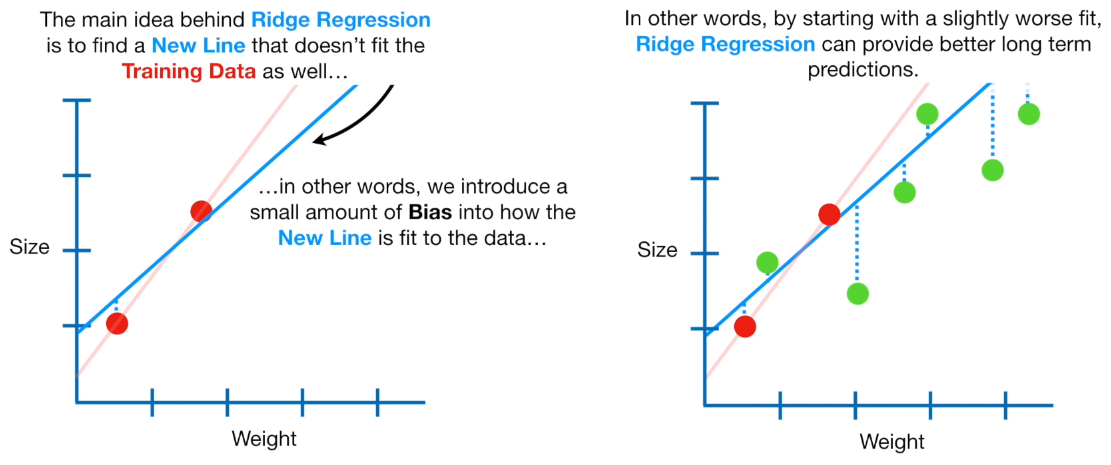
# 1. Lasso回归与岭回归基础
## 1.1 回归分析简介
回归分析是统计学中用来预测或分析变量之间关系的方法,广泛应用于数据挖掘和机器学习领域。在多元线性回归中,数据点拟合到一条线上以预测目标值。这种方法在有多个解释变量时可能会遇到多重共线性的问题,导致模型解释能力下降和过度拟合。
## 1.2 Lasso回归与岭回归的定义
Lasso(Least
避免统计陷阱:方差分析(ANOVA)常见错误与规避技巧(专业解读)
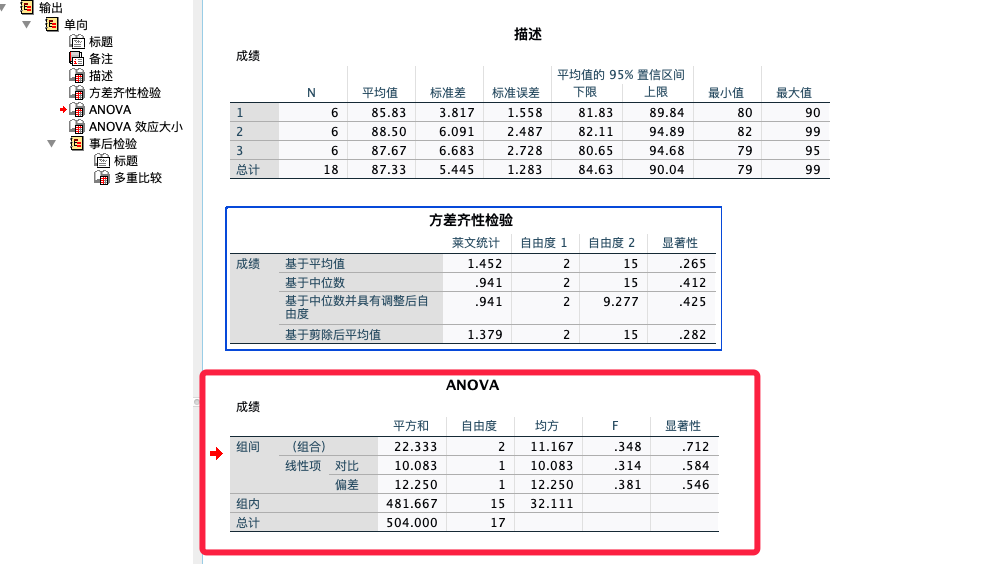
# 1. 方差分析(ANOVA)基础
## 方差分析(ANOVA)的定义与目的
方差分析,简称ANOVA,是一种统计方法,主要用于测试三个或三个以上样本均值是否存在显著性差异。它是建立在统计推断理论的基础上,通过比较各组内的方差(组内变异)和各组间的方差(组间变异),来确定组间差异是否显著。使用方差分析,研究者
【过拟合克星】:网格搜索提升模型泛化能力的秘诀

# 1. 网格搜索在机器学习中的作用
在机器学习领域,模型的选择和参数调整是优化性能的关键步骤。网格搜索作为一种广泛使用的参数优化方法,能够帮助数据科学家系统地探索参数空间,从而找到最佳的模型配置。
## 1.1 网格搜索的优势
网格搜索通过遍历定义的参数网格,可以全面评估参数组合对模型性能的影响。它简单直观,易于实现,并且能够生成可重复的实验结果。尽管它在某些
随机搜索在强化学习算法中的应用

# 1. 强化学习算法基础
强化学习是一种机器学习方法,侧重于如何基于环境做出决策以最大化某种累积奖励。本章节将为读者提供强化学习算法的基础知识,为后续章节中随机搜索与强化学习结合的深入探讨打下理论基础。
## 1.1 强化学习的概念和框架
强化学习涉及智能体(Agent)与环境(Environment)之间的交互。智能体通过执行动作(Action)影响环境,并根据环境的反馈获得奖
推荐系统中的L2正则化:案例与实践深度解析
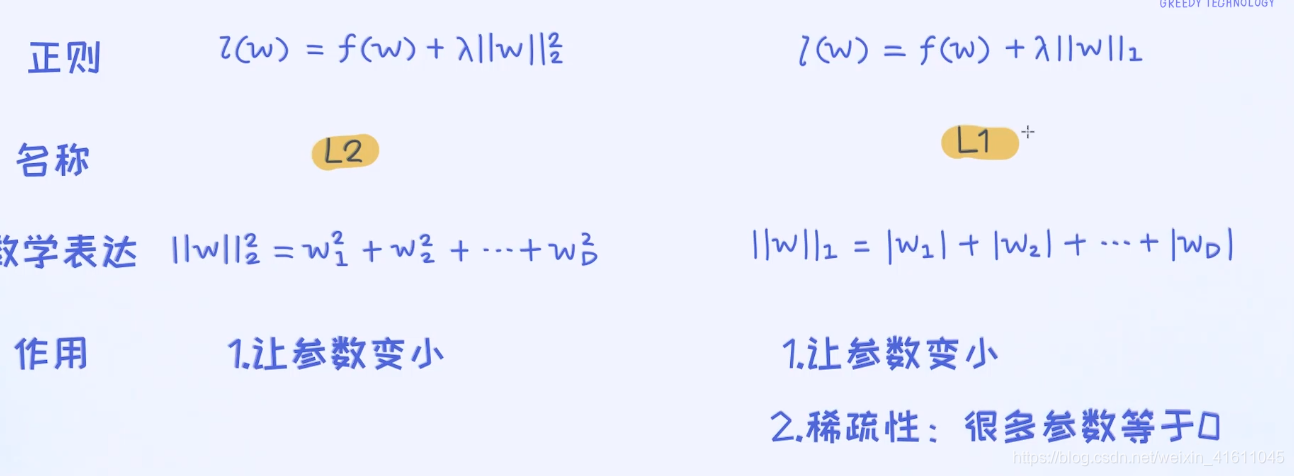
# 1. L2正则化的理论基础
在机器学习与深度学习模型中,正则化技术是避免过拟合、提升泛化能力的重要手段。L2正则化,也称为岭回归(Ridge Regression)或权重衰减(Weight Decay),是正则化技术中最常用的方法之一。其基本原理是在损失函数中引入一个附加项,通常为模型权重的平方和乘以一个正则化系数λ(lambda)。这个附加项对大权重进行惩罚,促使模型在训练过程中减小权重值,从而达到平滑模型的目的。L2正则化能够有效地限制模型复
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )