CAN FD数据报文的实时性研究:工业4.0标准下的应用与优化
发布时间: 2024-12-25 21:13:19 阅读量: 9 订阅数: 11 

免费的防止锁屏小软件,可用于域统一管控下的锁屏机制

# 摘要
CAN FD(Controller Area Network with Flexible Data-rate)作为传统CAN协议的演进版,在工业4.0通信中扮演着重要角色。本文综述了CAN FD的技术概述与背景,分析了其数据报文结构和协议解析,并详细探讨了物理层和数据链路层的关键特性。文中进一步讨论了CAN FD在工业4.0中的实际应用,包括通信需求分析、智能制造中的应用实例,以及实时性优化策略。通过对CAN FD实时性实验的设计、数据分析以及案例研究,本文评估了实时性优化策略的有效性,并对CAN FD面临的挑战和发展趋势进行了展望。研究结果表明,CAN FD在实时性、效率和可靠性上展现出巨大优势,但同时需要应对安全性和网络管理的挑战。
# 关键字
CAN FD技术;数据报文结构;工业4.0;实时性优化;实验数据分析;通信挑战
参考资源链接:[CAN与CANFD数据帧格式详解:ISO11898-1标准下的4种类型](https://wenku.csdn.net/doc/69mfztb0ii?spm=1055.2635.3001.10343)
# 1. CAN FD技术概述与背景
## 1.1 CAN FD技术的起源
CAN (Controller Area Network) FD(Flexible Data-rate)是CAN协议的扩展版本,主要针对车载网络和工业通信而设计。随着现代工业和汽车电子系统的复杂度日益增长,对数据传输速度和传输量的需求也随之提高。传统的CAN协议虽然在通信可靠性上表现出色,但在传输大量数据时则显得力不从心。为了解决这一问题,工程师们开发了CAN FD,它在保持了CAN协议的所有优点的同时,还能够提供更高的数据传输速率和更大的数据载荷。
## 1.2 CAN FD的应用场景
由于其高数据传输效率和优越的实时性能,CAN FD被广泛应用于汽车内部通信、工业自动化、医疗设备以及航空电子等领域。在这些场景中,设备和系统必须快速、可靠地交换信息,而CAN FD则可以提供必要的带宽和延迟保证。
## 1.3 技术背景与必要性
CAN FD的技术背景与必要性可以从多个角度进行理解。从硬件角度看,它的引入可以提高现有网络的性能,而无需彻底更换基础设施。从应用角度看,它支持了更复杂的软件功能,如先进的驾驶辅助系统(ADAS)或工业机器人控制。随着物联网(IoT)的快速发展和工业4.0的推进,对于高效率数据通信的需求日益迫切,CAN FD因此成为了一个重要的技术选择。
# 2. ```
# 第二章:CAN FD数据报文结构与协议解析
## 2.1 CAN FD报文的物理层特性
### 2.1.1 CAN FD与传统CAN的区别
CAN FD(Flexible Data-rate)是在传统CAN协议基础上的扩展,旨在提高数据传输效率。它保留了CAN协议的基本框架和原理,但在数据帧结构、传输速率及位填充策略上做出了改进,这允许在保持CAN协议的可靠性的同时,大幅提高了数据传输的速率和灵活性。具体区别如下:
- **传输速率**:在CAN FD中,数据传输速率可达到传统CAN的8倍以上,大大提高了网络负载下的数据吞吐量。
- **位填充规则**:CAN FD在新的数据帧中引入了不同的位填充规则,与CAN的位填充有所不同,它允许数据字段中出现连续的五个相同位值,而CAN仅允许四个。
- **数据长度**:数据字段的长度在CAN FD中可达到64字节,比传统CAN的8字节有显著增加,这对于传输大量数据非常有利。
- **错误处理**:在错误检测机制上,CAN FD和传统CAN保持一致,但CAN FD引入了新的错误帧格式来匹配更高的数据传输速率。
### 2.1.2 CAN FD的位速率和位填充
CAN FD协议中位速率的提高意味着每个位的时间变短,因此网络的同步变得更加敏感。为了保证网络的同步性,CAN FD引入了新的位速率切换机制,并且在数据字段中采用了不同的位填充规则,以防止出现过多连续的相同位导致时钟偏差。
位填充在CAN FD中具有以下特点:
- 在数据帧和远程帧的控制字段及数据字段中,每当出现5个连续相同的位(0或1),就插入一个相反的位(1或0)以保持同步。
- 在帧起始部分和仲裁场等其他字段,仍遵循传统CAN的四位填充规则。
## 2.2 CAN FD报文的数据链路层特点
### 2.2.1 数据帧格式与类型
CAN FD的数据帧格式如图所示:
```
| SOF | ID | RTR | IDE | r0 | DLC | 数据 | CRC | ACK | EOF |
```
其中关键字段说明如下:
- **SOF(Start of Frame)**:帧起始标志。
- **ID(Identifier)**:标识符,决定帧优先级。
- **RTR(Remote Transmission Request)**:远程传输请求标志。
- **IDE(Identifier Extension)**:标识符扩展标志。
- **r0**:保留位,一般为0。
- **DLC(Data Length Code)**:数据长度代码,定义数据字段中字节的数量。
- **数据(Data)**:实际传输的数据。
- **CRC(Cyclic Redundancy Check)**:循环冗余校验。
- **ACK(Acknowledgment)**:确认段。
- **EOF(End of Frame)**:帧结束标志。
CAN FD支持两种类型的数据帧:
- **数据帧(DataFrame)**:携带实际数据信息。
- **远程帧(Remote Frame)**:请求发送数据帧。
### 2.2.2 错误处理和通信安全
CAN FD协议在错误处理方面继承了CAN协议的主动和被动错误检测机制,并为数据帧引入了新的错误帧格式。
- **主动错误检测**:发送节点会持续监控其发送的数据,并在发现错误时立即发送错误帧。
- **被动错误检测**:接收节点对收到的消息进行校验,并在错误发生时发送错误帧。
- **错误帧(Error Frame)**:当检测到错误时,任何节点都可以发送错误帧以表明错误发生。
- **错误激活和错误被动状态**:节点根据错误计数器的值可以处于错误激活或错误被动状态,影响错误的传播。
- **通信安全**:尽管CAN FD协议提供强大的错误检测机制,但数据安全和隐私保护仍需要额外的加密和认证机制,这在CAN FD中并未直接提供。
## 2.3 CAN FD协议的实时性要求
### 2.3.1 实时性在工业通信中的作用
实时性是指系统响应外部事件的及时程度,这对于工业通信尤为关键,因为它直接关系到生产过程的效率和安全性。在工业4.0中,设备间需要进行高频率和高可靠性的数据交互,以实现生产流程的优化和自动化。
- **确定性和低延迟**:实时系统通常要求有确定性的响应时间和极低的延迟。
- **高可靠性**:实时通信还必须具备高可靠性,以避免数据错误或丢
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 CAN 和 CAN FD 数据报文格式的方方面面,为读者提供了一份全面的指南。从数据报文格式的差异到性能优化策略,再到工业自动化中的应用,该专栏涵盖了以下主题:
* CAN 和 CAN FD 数据报文的比较和对比
* CAN FD 数据报文扩展技术和兼容性策略
* 数据报文处理标准和实战指南
* 数据报文完整性检验技术和应用
* 时间触发和事件触发的数据报文处理新视角
* 数据报文过滤技术和网络通信效率提升术
* 数据报文流量控制策略和 CAN FD 网络拥堵解决方案
* CAN 和 CAN FD 在物联网中的应用挑战和数据报文传输攻略
* 数据报文重传机制和 CAN FD 的容错与可靠性提升策略
* 高速数据传输下的 CAN FD 报文格式和性能关系
* 航空航天领域中 CAN FD 数据报文格式的创新应用
* CAN FD 数据报文的实时性研究和工业 4.0 标准下的应用与优化
* CAN FD 报文调度策略和实时性提升与网络效率优化指南
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
揭秘QPSK:从基础到性能优化的全指南(附案例分析)
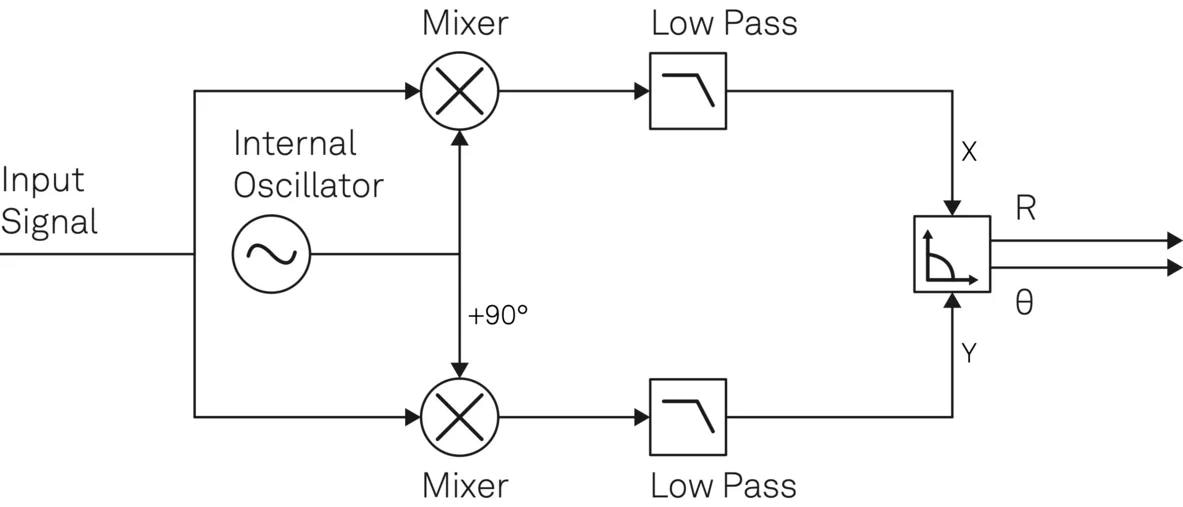
# 摘要
QPSK(Quadrature Phase Shift Keying)调制是一种广泛应用于数字通信系统中的调制技术,它通过改变载波的相位来传输数字信息,具备较高的频谱效率和传输速率。本文从基本原理入手,深入分析了QPSK信号的构成、特点及与其它调制技术的比较,并探讨了其数学模型和在不同通信系统中的实现方法。通过理论性能分
剪映中的音频处理
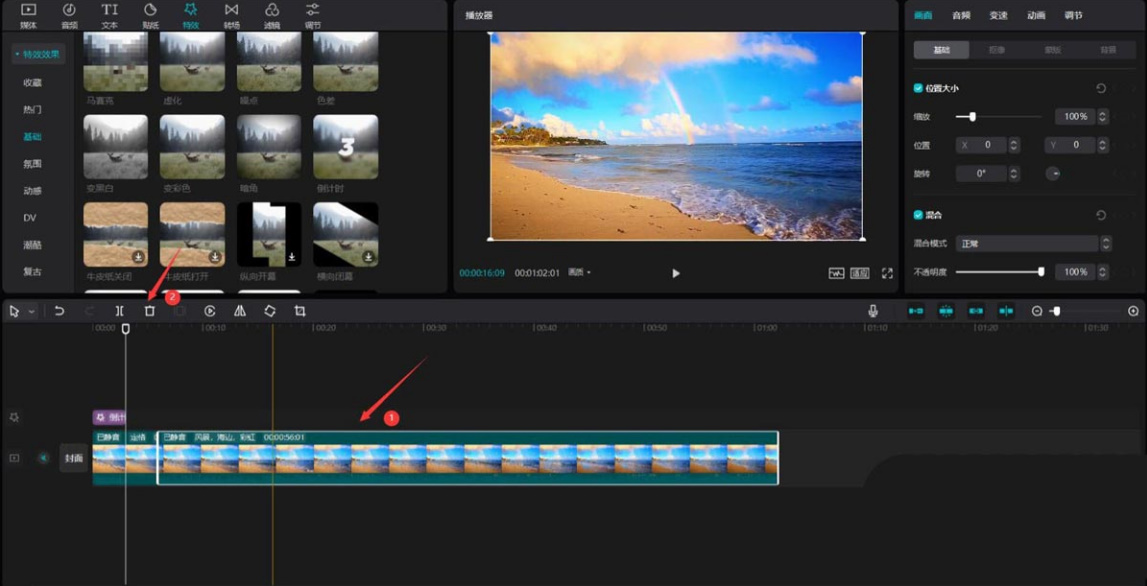
# 摘要
本文详细探讨了剪映软件中音频处理的理论与实践技巧。首先介绍了剪映中音频处理的基础知识和理论基础,包括音频的数字信号处理、音频文件格式以及音频处理的术语如采样率、位深度、频率响应和动态范围。接着,文章深入讲解了剪映音频编辑中的基本剪辑操作、音效应用、降噪与回声消除等技巧。进阶技巧部分,探讨了音频自动化的应用、创意音频设计以及音频问题的诊断与修复。最后,通过具体的应用案例分析了如何在剪映中创建声音背景、处理人声配音以
【ABAP与JSON交互的优化策略】:提高数据处理效率的字段名映射方法
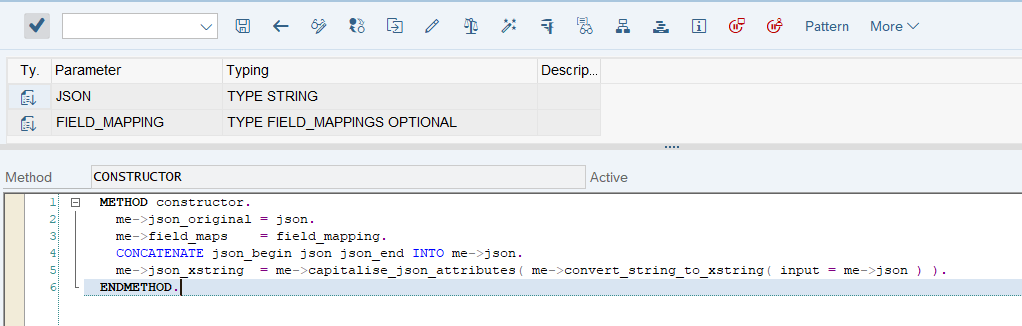
# 摘要
本文旨在介绍ABAP与JSON之间的交互机制,探讨JSON数据结构与ABAP数据类型之间的映射方法,并提供字段名映射的实现技术与应用策略。文章深入分析了基础数据结构,阐述了字段名映射的理论基础、实现原理以及性能优化策略。此外,本文还探讨了高级数据处理技术、交互性能提升和自动化集成的策略,通过案例分析分享最佳实践,为ABAP开发者提供了一个全面的JSON交互指南。
# 关键字
ABAP;J
中控标Access3.5新手必读:一步步带你安装及配置门禁系统

# 摘要
本文全面介绍了门禁系统的基础知识、中控标Access3.5的安装与配置流程,以及日常管理与维护的方法。首先,概述了门禁系统的基础知识,为读者提供了必要的背景信息。接着,详细阐述了中控标Access3.5的安装步骤,包括系统需求分析、安装前准备以及安装过程中的关键操作和常见问题解决方案。之后,文章深入讲解了系统配置指南,涵盖了数据库配置、
【rockusb.inf解码】:10个常见错误及其解决方案

# 摘要
本文围绕rockusb.inf文件的概述、错误诊断、检测与修复、案例剖析以及预防与维护进行了系统性的探讨。首先介绍了rockusb.inf文件的基本功能和结构,然后深入分析了语法错误、配置错误和系统兼容性问题等常见错误类型。通过详细阐述错误
Rsoft仿真网格划分技术:理论+操作=专家级指南
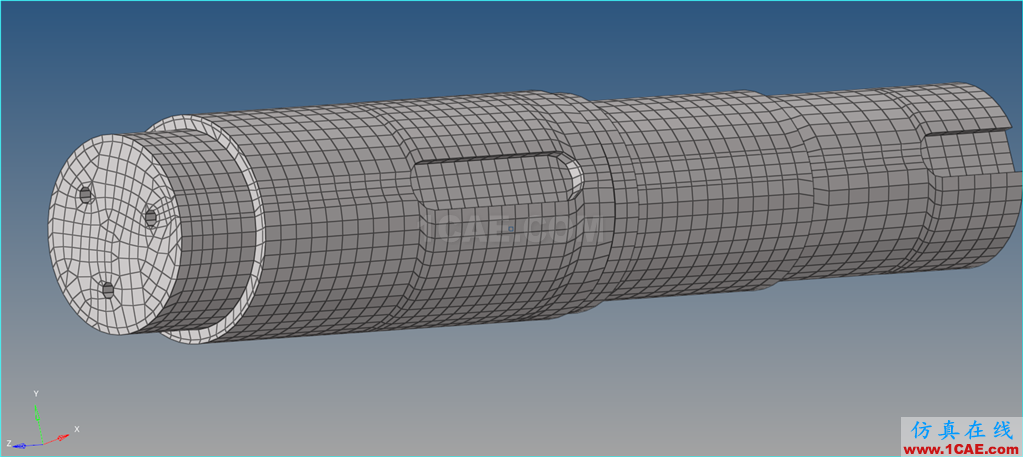
# 摘要
随着计算仿真的发展,网格划分技术作为其中的关键环节,其准确性和效率直接影响仿真结果的质量和应用范围。本文对Rsoft仿真软件中的网格划分技术进行了全面概述,从基础理论到操作实践,再到高级应用和优化技巧,进行了系统的探讨。通过对网格划分的数学基础、技术原理及质量评估进行深入分析,文章进一步展示了如何在Rsoft软件中进行有效的网格划分操作,并结合行业案例,探讨了网格划分在半导体和生物医疗行业中的实
电力系统继电保护仿真深度剖析:ETAP软件应用全攻略
# 摘要
本文旨在详细介绍电力系统继电保护的基础知识、ETAP软件的操作与仿真分析实践,以及继电保护的优化和高级仿真案例研究。首先,概述了电力系统继电保护的基本原理和重要性。接着,对ETAP软件的界面布局、设备建模和仿真功能进行了详细介绍,强调了其在电力系统设计与分析中的实用性和灵活性。在继电保护仿真分析实践章节中,本文阐述了设置仿真、运行分析以及系统优化
高级数据结构深度解析:和积算法的现代应用
# 摘要
本文系统介绍了和积算法的基本概念、理论框架以及其在数据分析和机器学习中的应用。首先,概述了和积算法的起源和核心数学原理,随后探讨了该算法的优化策略,包括时间和空间复杂度的分析,并举例展示了优化实践。接着,文章详细阐述了和积算法在数据预处理、复杂数据集处理和模式识别中的具体应用。在机器学习领域,本文对比了和积算法与传统算法,探讨了它与深度学习的结合
台湾新代数控API接口初探:0基础快速掌握数控数据采集要点
# 摘要
本文旨在深入解析台湾新代数控API接口的理论与实践应用。首先介绍了数控API接口的基本概念、作用以及其在数控系统中的重要性。接着,文章详细阐述了数控API接口的通信协议、数据采集与处理的相关理论知识,为实践操作打下坚实的理论基础。随后,文章通过实践前的准备、数据采集代码实现以及数据处理与存储三个方面,分享了数据采集实践的具体步骤与技巧。进一步地,文章探讨了数
FANUC外部轴性能优化:揭秘配置技巧,提升加工精度
# 摘要
本文系统介绍了FANUC外部轴的基础知识、配置理论、性能优化实践、编程应用以及加工效率提升方法,并展望了外部轴技术的发展趋势。通过对外部轴的类型与功能进行阐述,详细分析了其在加工中心的应用及控制系统。进一步,本文探讨了同步控制机制以及性能优化的技巧,包括精度提升、动态性能调优和故障诊断策略。文章还针对外部轴编程进行了深入
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )