51单片机控制舵机在娱乐玩具中的应用:带来沉浸式游戏体验,打造娱乐新高度
发布时间: 2024-07-12 08:10:33 阅读量: 74 订阅数: 48 
# 1. 51单片机简介及舵机控制原理
### 1.1 51单片机简介
51单片机是一种8位微控制器,以其低成本、高可靠性和广泛的应用而闻名。它具有一个8位CPU、4KB的程序存储器和128字节的RAM,使其非常适合于对成本敏感的嵌入式系统。
### 1.2 舵机控制原理
舵机是一种由电机驱动的旋转执行器,它可以根据控制信号精确地旋转到指定角度。舵机控制通常涉及使用脉宽调制(PWM)信号,其中脉冲宽度与舵机旋转角度成正比。
# 2. 51单片机舵机控制编程
### 2.1 舵机控制基础知识
#### 2.1.1 舵机的工作原理
舵机是一种由电机、齿轮组和控制电路组成的机电一体化装置。其工作原理是:控制电路根据接收到的控制信号,驱动电机旋转,带动齿轮组转动,从而改变舵机输出轴的位置。舵机的控制信号一般为脉宽调制(PWM)信号,其脉冲宽度对应于舵机输出轴的转动角度。
#### 2.1.2 舵机控制协议
舵机控制协议是一种通信协议,用于控制舵机的位置和速度。常见的舵机控制协议有:
- **PWM 协议:**通过发送不同脉冲宽度的 PWM 信号来控制舵机的位置。
- **串行协议:**通过发送特定格式的串行数据来控制舵机的位置和速度。
### 2.2 51单片机舵机控制程序设计
#### 2.2.1 程序流程分析
51单片机舵机控制程序的流程一般如下:
1. 初始化舵机控制模块。
2. 根据舵机控制协议生成控制信号。
3. 发送控制信号给舵机。
4. 等待舵机响应。
5. 根据舵机响应调整控制信号。
#### 2.2.2 关键代码讲解
```c
// 舵机控制初始化
void servo_init(void)
{
// 设置 PWM 输出引脚
PWM_Init(PWM_CHANNEL, PWM_PERIOD, PWM_DUTY);
}
// 生成 PWM 控制信号
void servo_set_angle(uint8_t angle)
{
// 计算 PWM 脉冲宽度
uint16_t pulse_width = angle * PWM_PERIOD / 180;
// 设置 PWM 脉冲宽度
PWM_SetDuty(PWM_CHANNEL, pulse_width);
}
```
**代码逻辑分析:**
- `servo_init()` 函数初始化 PWM 输出引脚,设置 PWM 周期和占空比。
- `servo_set_angle()` 函数根据舵机角度计算 PWM 脉冲宽度,并设置 PWM 脉冲宽度。
**参数说明:**
- `angle`:舵机角度,范围为 0~180 度。
### 2.3 舵机控制程序调试与优化
#### 2.3.1 常见问题及解决方法
- **舵机不响应:**检查 PWM 输出引脚是否正确连接,PWM 频率和占空比是否设置正确。
- **舵机抖动:**检查 PWM 信号是否稳定,PWM 周期和占空比是否设置合理。
- **舵机转动角度不准确:**检查舵机控制协议是否正确,舵机角度计算是否准确。
#### 2.3.2 程序优化技巧
- **使用定时器中断:**定时器中断可以精确控制 PWM 脉冲宽度,提高舵机控制精度。
- **优化 PWM 输出:**使用硬件 PWM 模块可以减少 CPU 占用率,提高程序效率。
- **使用 PID 控制算法:**

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以“51单片机控制舵机”为主题,提供从入门到高级的全面指南。它涵盖了舵机控制的核心原理、代码实现、故障排除、性能优化、传感器融合、无线通信、人工智能应用、在机器人、工业自动化、医疗器械、安防监控、娱乐玩具、教育科研等领域的应用,以及与其他单片机和控制方式的比较。此外,专栏还提供了项目实战案例、开源项目解析和行业发展报告,帮助读者深入了解舵机控制技术,快速掌握舵机控制技能,并了解舵机控制行业的发展趋势和技术创新。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
PSASP电力系统仿真深度剖析:模型构建至结果解读全攻略

# 摘要
PSASP电力系统仿真软件作为电力行业的重要工具,提供了从模型构建到仿真结果解读的完整流程。本论文首先概述了PSASP的基本功能及其在电力系统仿真中的应用,随后深入探讨了PSASP模型构建的基础,包括电力系统元件的建模、系统拓扑结构设计及模型参
小米mini路由器SN问题诊断与解决:专家的快速修复宝典

# 摘要
本文对小米mini路由器的序列号(SN)问题进行了全面的研究。首先概述了小米mini路由器SN问题的基本情况,然后深入分析了其硬件与固件的组成部分及其之间的关系,特别强调了固件升级过程中遇到的SN问题。随后,文章详细介绍了SN问题的诊断步骤,从初步诊断到通过网络接口进行故障排查,再到应用高级诊断技巧。针对发现的SN问题,提出了解决方案,包括软件修复和硬件更换,并强
5G网络切片技术深度剖析:基于3GPP标准的创新解决方案
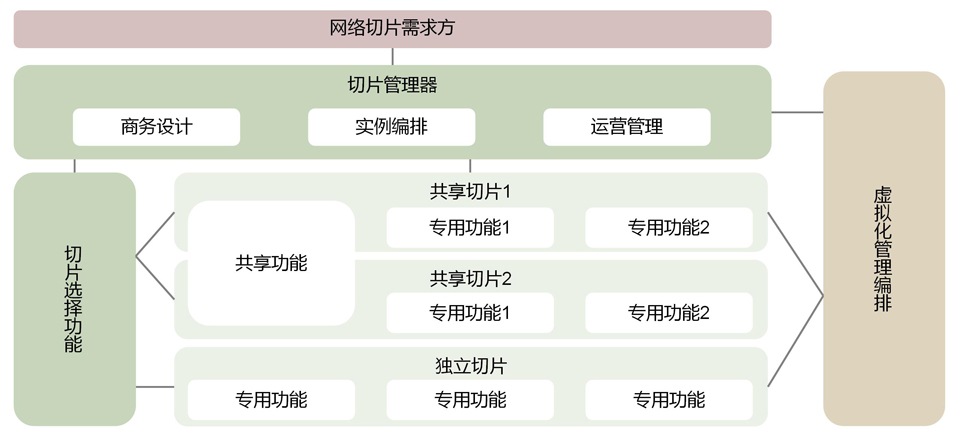
# 摘要
随着5G技术的发展,网络切片技术作为支持多样服务和应用的关键创新点,已成为行业关注的焦点。本文首先概述了5G网络切片技术,接着探讨了其在3GPP标准下的架构,包括定义、关键组成元素、设计原则、性能指标以及虚拟化实现等。文章进一步分析了网络切片在不同应用场景中的部署流程和实践案例,以及面临的挑战和解决方案。在此基础上,展望了网络切
深度揭秘RLE编码:BMP图像解码的前世今生,技术细节全解析
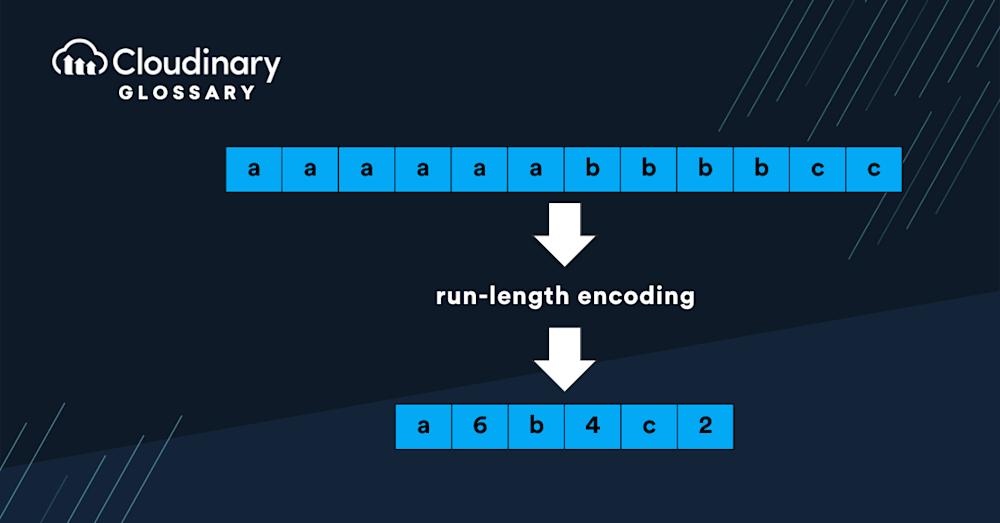
# 摘要
本文系统性地探讨了行程长度编码(RLE)编码技术及其在位图(BMP)图像格式中的应用。通过深入分析RLE的基本概念、算法细节以及在BMP中的具体实现,本文揭示了RLE编码的优缺点,并对其性能进行了综合评估。文章进一步探讨了RLE与其他现代编码技术的比较,
【SEM-BCS操作全攻略】:从新手到高手的应用与操作指南
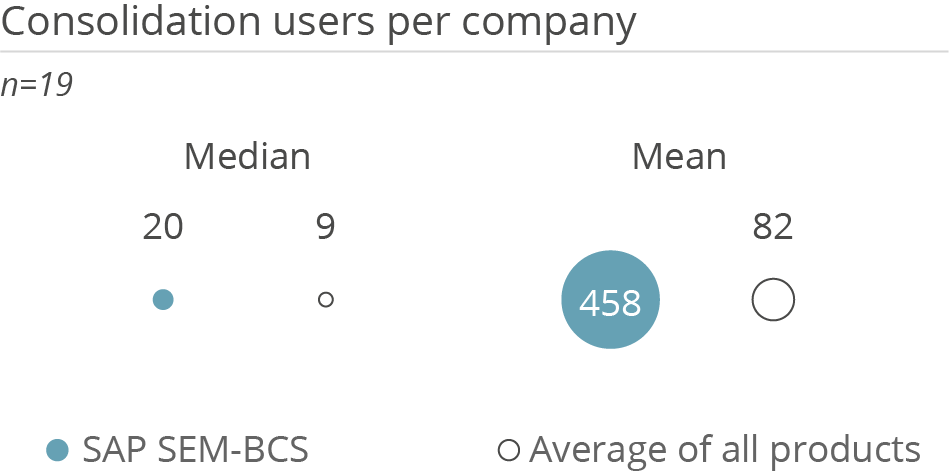
# 摘要
本文详细介绍了SEM-BCS(Scanning Electron Microscope - Beam Current Stabilizer)系统,该系统在纳米科技与材料科学领域有着广泛应用。首先概述了SEM-BCS的基础知识及其核心操作原理,包括其工作机制、操作流程及配置与优化方法。接着,通过多个实践操作案例,展示了SEM-BCS在数据分析、市场研究以及竞争对手分析中的具
【算法比较框架】:构建有效的K-means与ISODATA比较模型
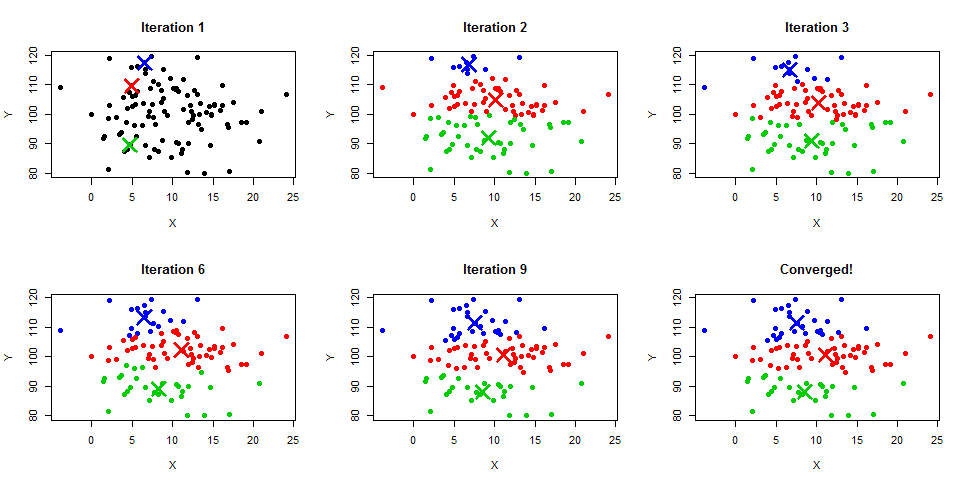
# 摘要
随着数据聚类需求的增长,有效比较不同算法的性能成为数据分析的重要环节。本文首先介绍了算法比较框架的理论基础,然后详细探讨了K-means和ISODATA这两种聚类算法的理论与实践。通过对两种算法的实现细节和优化策略进行深入分析,本文揭示了它们在实际应用中的表现,并基于构建比较模型的步骤与方法,对这两种算法进行了性能评估。案例
Linux脚本自动化管理手册:为RoseMirrorHA量身打造自动化脚本

# 摘要
本文系统地介绍了Linux脚本自动化管理的概念、基础语法、实践应用以及与RoseMirrorHA的集成。文章首先概述了Linux脚本自动化管理的重要性和基础语法结构,然后深入探讨了脚本在文件操作、网络管理、用户管理等方面的自动化实践。接着,文章重点讲解了Linux脚本在RoseMirrorH
【软件测试的哲学基础】

# 摘要
本文全面概述了软件测试的理论基础、类型与方法以及实践技巧,并通过案例研究来探讨传统与现代软件项目测试的实施细节。文章从软件测试的基本原则出发,分析了测试与调试的区别、软件测试模型的演变以及测试过程中的风险管理。接着,详细介绍了黑盒测试、白盒测试、静态测试、动态测试、自动化测试和性能测试的不同策略和工具。在实践技巧部分,文章探讨了测试用例设计、缺陷管理和测试工具运用的策略。最后,展望了软件测试的未来趋势,包括测试技术的发展
【数据交互优化】:S7-300 PLC与PC通信高级技巧揭秘
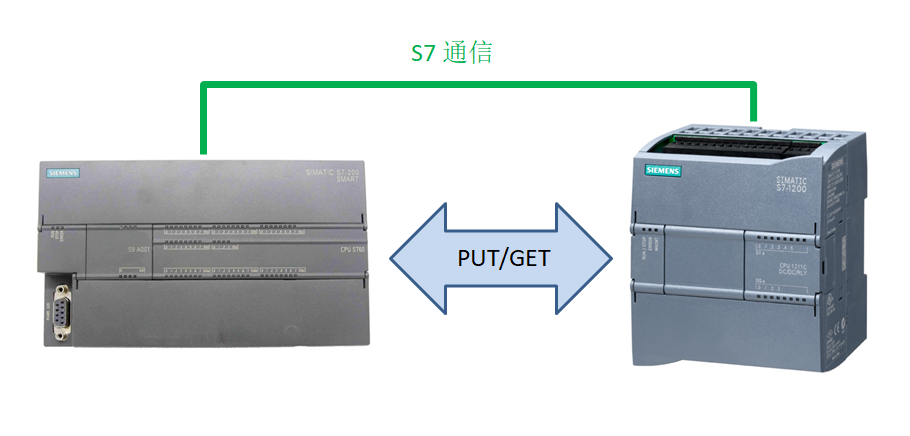
# 摘要
本文全面探讨了S7-300 PLC与PC通信的技术细节、实现方法、性能优化以及故障排除。首先概述了S7-300 PLC与PC通信的基础,包括不同通信协议的解析以及数据交换的基本原理。接着详细介绍了PC端通信接口的实现,包括软件开发环境的选择、编程实现数据交互以及高级通信接口的优化策略。随后,文章着重分析了通信性能瓶颈,探讨了故障诊断与排除技巧,并通过案例分析高级
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )