51单片机控制舵机在医疗器械中的应用:实现精准医疗与康复,赋能医疗创新
发布时间: 2024-07-12 08:04:54 阅读量: 74 订阅数: 51 

# 1. 51单片机概述与舵机控制原理
### 1.1 51单片机简介
51单片机是一款8位单片机,具有结构简单、功能强大、成本低廉等特点,广泛应用于工业控制、医疗器械、消费电子等领域。
### 1.2 舵机简介
舵机是一种带有内置控制器的电机,可以根据控制信号精确地转动到指定角度。舵机常用于机器人、无人机、医疗器械等领域,实现精确的运动控制。
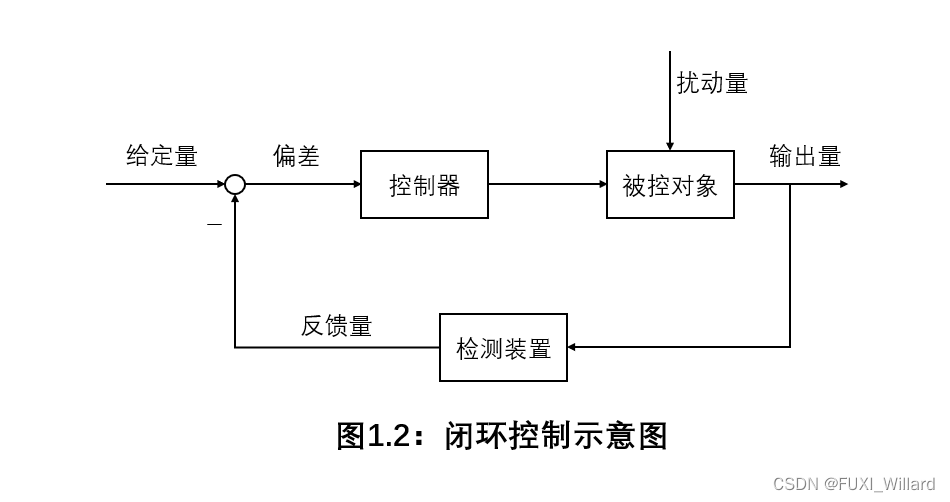
### 1.3 舵机控制原理
舵机控制原理主要基于脉宽调制(PWM)技术。通过改变PWM信号的脉冲宽度,可以控制舵机的转动角度。舵机内部的控制器根据PWM信号的脉冲宽度,计算出转动角度并驱动电机转动。
# 2. 舵机控制算法与单片机编程
### 2.1 舵机控制算法
舵机控制算法是实现舵机精确控制的关键,主要分为两种类型:PID控制算法和模糊控制算法。
#### 2.1.1 PID控制算法
PID控制算法是一种经典的反馈控制算法,通过测量舵机的实际位置与期望位置之间的偏差,并根据偏差的大小和变化率进行控制。PID算法由三个参数组成:比例系数(P)、积分系数(I)和微分系数(D)。
```python
# PID控制算法实现
def pid_control(error, prev_error, dt):
"""
PID控制算法实现
参数:
error: 误差值
prev_error: 上一个误差值
dt: 时间间隔
返回:
控制量
"""
# 计算比例项
p_term = error * kp
# 计算积分项
i_term += ki * error * dt
# 计算微分项
d_term = (error - prev_error) / dt * kd
# 计算控制量
control_value = p_term + i_term + d_term
return control_value
```
**逻辑分析:**
该代码实现了PID控制算法。首先,计算比例项、积分项和微分项。然后,将这三个项相加得到控制量。控制量的大小和方向决定了舵机的运动方向和速度。
**参数说明:**
* `error`: 误差值,即舵机的实际位置与期望位置之间的偏差。
* `prev_error`: 上一个误差值。
* `dt`: 时间间隔。
* `kp`: 比例系数。
* `ki`: 积分系数。
* `kd`: 微分系数。
#### 2.1.2 模糊控制算法
模糊控制算法是一种基于模糊逻辑的控制算法,它将舵机的控制问题转化为一系列模糊规则,然后根据这些规则进行控制。模糊控制算法具有鲁棒性强、抗干扰能力强的优点。
```python
# 模糊控制算法实现
def fuzzy_control(error, error_rate):
"""
模糊控制算法实现
参数:
error: 误差值
error_rate: 误差变化率
返回:
控制量
"""
# 定义模糊规则
rules = [
("NB", "NB", "NB"),
("NB", "NM", "NS"),
("NB", "NS", "ZE"),
# ...
]
# 根据误差和误差变化率确定模糊输入
error_input = fuzzify(error)
error_rate_input = fuzzify(error_rate)
# 根据模
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以“51单片机控制舵机”为主题,提供从入门到高级的全面指南。它涵盖了舵机控制的核心原理、代码实现、故障排除、性能优化、传感器融合、无线通信、人工智能应用、在机器人、工业自动化、医疗器械、安防监控、娱乐玩具、教育科研等领域的应用,以及与其他单片机和控制方式的比较。此外,专栏还提供了项目实战案例、开源项目解析和行业发展报告,帮助读者深入了解舵机控制技术,快速掌握舵机控制技能,并了解舵机控制行业的发展趋势和技术创新。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
扇形菜单设计原理

# 摘要
扇形菜单作为一种创新的界面设计,通过特定的布局和交互方式,提升了用户在不同平台上的导航效率和体验。本文系统地探讨了扇形菜单的设计原理、理论基础以及实际的设计技巧,涵盖了菜单的定义、设计理念、设计要素以及理论应用。通过分析不同应用案例,如移动应用、网页设计和桌面软件,本文展示了扇形菜单设计的实际效果,并对设计过程中的常见问题提出了改进策略。最后,文章展望了扇形菜单设计的未来趋势,包括新技术的应用和设计理念的创新。
# 关键字
扇形菜
传感器在自动化控制系统中的应用:选对一个,提升整个系统性能
# 摘要
传感器在自动化控制系统中发挥着至关重要的作用,作为数据获取的核心部件,其选型和集成直接影响系统的性能和可靠性。本文首先介绍了传感器的基本分类、工作原理及其在自动化控制系统中的作用。随后,深入探讨了传感器的性能参数和数据接口标准,为传感器在控制系统中的正确集成提供了理论基础。在此基础上,本文进一步分析了传感器在工业生产线、环境监测和交通运输等特定场景中的应用实践,以及如何进行
CORDIC算法并行化:Xilinx FPGA数字信号处理速度倍增秘籍

# 摘要
本文综述了CORDIC算法的并行化过程及其在FPGA平台上的实现。首先介绍了CORDIC算法的理论基础和并行计算的相关知识,然后详细探讨了Xilinx FPGA平台的特点及其对CORDIC算法硬件优化的支持。在此基础上,文章具体阐述了CORDIC算法
C++ Builder调试秘技:提升开发效率的十项关键技巧
# 摘要
本文详细介绍了C++ Builder中的调试技术,涵盖了从基础知识到高级应用的广泛领域。文章首先探讨了高效调试的准备工作和过程中的技巧,如断点设置、动态调试和内存泄漏检测。随后,重点讨论了C++ Builder调试工具的高级应用,包括集成开发环境(IDE)的使用、自定义调试器及第三方工具的集成。文章还通过具体案例分析了复杂bug的调试、
MBI5253.pdf高级特性:优化技巧与实战演练的终极指南
# 摘要
MBI5253.pdf作为研究对象,本文首先概述了其高级特性,接着深入探讨了其理论基础和技术原理,包括核心技术的工作机制、优势及应用环境,文件格式与编码原理。进一步地,本文对MBI5253.pdf的三个核心高级特性进行了详细分析:高效的数据处理、增强的安全机制,以及跨平台兼容性,重点阐述了各种优化技巧和实施策略。通过实战演练案
【Delphi开发者必修课】:掌握ListView百分比进度条的10大实现技巧

# 摘要
本文详细介绍了ListView百分比进度条的实现与应用。首先概述了ListView进度条的基本概念,接着深入探讨了其理论基础和技术细节,包括控件结构、数学模型、同步更新机制以及如何通过编程实现动态更新。第三章
先锋SC-LX59家庭影院系统入门指南
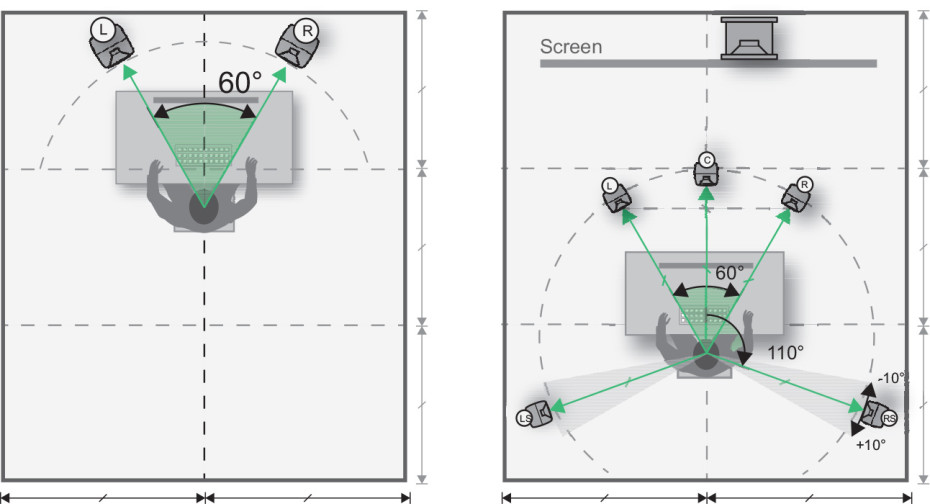
# 摘要
本文全面介绍了先锋SC-LX59家庭影院系统,从基础设置与连接到高级功能解析,再到操作、维护及升级扩展。系统概述章节为读者提供了整体架构的认识,详细阐述了家庭影院各组件的功能与兼容性,以及初始设置中的硬件连接方法。在高级功能解析部分,重点介绍了高清音频格式和解码器的区别应用,以及个
【PID控制器终极指南】:揭秘比例-积分-微分控制的10个核心要点

# 摘要
PID控制器作为工业自动化领域中不可或缺的控制工具,具有结构简单、可靠性高的特点,并广泛应用于各种控制系统。本文从PID控制器的概念、作用、历史发展讲起,详细介绍了比例(P)、积分(I)和微分(D)控制的理论基础与应用,并探讨了PID
【内存技术大揭秘】:JESD209-5B对现代计算的革命性影响
# 摘要
本文详细探讨了JESD209-5B标准的概述、内存技术的演进、其在不同领域的应用,以及实现该标准所面临的挑战和解决方案。通过分析内存技术的历史发展,本文阐述了JESD209-5B提出的背景和核心特性,包括数据传输速率的提升、能效比和成本效益的优化以及接口和封装的创新。文中还探讨了JESD209-5B在消费电子、数据中心、云计算和AI加速等领域的实
【install4j资源管理精要】:优化安装包资源占用的黄金法则

# 摘要
install4j是一款强大的多平台安装打包工具,其资源管理能力对于创建高效和兼容性良好的安装程序至关重要。本文详细解析了install4j安装包的结构,并探讨了压缩、依赖管理以及优化技术。通过对安装包结构的深入理解,本文提供了一系列资源文件优化的实践策略,包括压缩与转码、动态加载及自定义资源处理流程。同时
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )