51单片机控制舵机开源项目解析:学习与借鉴,快速提升舵机控制技术
发布时间: 2024-07-12 08:22:39 阅读量: 72 订阅数: 41 

开源数字舵机
# 1. 51单片机控制舵机概述
舵机是一种常见的执行器,广泛应用于机器人、无人机等领域。51单片机是一种低成本、高性能的微控制器,非常适合控制舵机。本篇文章将介绍51单片机控制舵机的概述,包括舵机的基本原理、51单片机与舵机的接口连接以及舵机控制算法的实现。
# 2. 51单片机控制舵机理论基础
### 2.1 舵机的工作原理
舵机是一种带有内置控制电路的电机,可以根据接收到的控制信号精确地控制其转动角度。舵机的工作原理如下:
- **接收控制信号:**舵机通过控制线接收来自控制器的脉宽调制(PWM)信号。
- **PWM信号解调:**舵机内部的控制电路将PWM信号解调为数字信号,该数字信号表示舵机需要转动的角度。
- **电机驱动:**控制电路根据解调后的角度信号驱动电机转动,从而达到控制舵机转动角度的目的。
舵机的转动角度由PWM信号的脉冲宽度决定。脉冲宽度越宽,舵机转动的角度越大;脉冲宽度越窄,舵机转动的角度越小。通常,舵机的转动范围为 0°~180°。
### 2.2 51单片机与舵机的接口连接
51单片机与舵机通常通过PWM输出引脚进行连接。51单片机内部集成了PWM发生器,可以产生可调脉冲宽度的PWM信号。
连接方式如下:
- 51单片机的PWM输出引脚连接到舵机的控制线(通常为橙色或黄色)。
- 51单片机的电源引脚(VCC)连接到舵机的电源引脚(通常为红色)。
- 51单片机的接地引脚(GND)连接到舵机的接地引脚(通常为黑色)。
**代码块:**
```c
#include <reg51.h>
void main() {
// 设置 PWM 输出引脚
P1 = 0x80; // P1.7 输出 PWM 信号
// 设置 PWM 频率和占空比
TMOD = 0x01; // 定时器 0 模式 1,16 位自动重装
TH0 = 0xFF; // 初始高字节
TL0 = 0x00; // 初始低字节
TR0 = 1; // 启动定时器 0
while (1) {
// 产生 PWM 信号
TH0 = 0xFF; // 重置高字节
TL0 = 0x00; // 重置低字节
while (TF0 == 0); // 等待溢出标志位置位
TF0 = 0; // 清除溢出标志位
}
}
```
**逻辑分析:**
这段代码使用 51 单片机的定时器 0 产生 PWM 信号。通过设置定时器 0 的模式、初始值和溢出中断,可以控制 PWM 信号的频率和占空比。
**参数说明:**
- `P1 = 0x80;`:将 P1.7 引脚设置为 PWM 输出引脚。
- `TMOD = 0x01;`:设置定时器 0 为模式 1,16 位自动重装。
- `TH0 = 0xFF;`:设置定时器 0 初始高字节为 0xFF。
- `TL0 = 0x00;`:设置定时器 0 初始低字节为 0x00。
- `TR0 = 1;`:启动定时器 0。
- `while (TF0 == 0);`:等待定时器 0 溢出标志位置位。
- `TF0 = 0;`:清除定时器 0 溢出标志位。
# 3.1 舵机控制算法的实现
舵机控制算法是实现舵机控制的关键,其核心思想是通过生成特定频率和占空比的PWM波形,控制舵机旋转的角度。
### 3.1.1 PWM波形的生成
PWM(脉宽调制)是一种通过改变脉冲宽度来控制输出功率的技术。在舵机控制中,PWM波形用于控制舵机旋转的角度。
```c
void pwm_init(void) {
// 设置PWM定时器参数
TMOD = 0x01;
TH0 = 0xFF;
TL0 = 0x00;
TR0 = 1;
// 设置PWM输出引脚
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以“51单片机控制舵机”为主题,提供从入门到高级的全面指南。它涵盖了舵机控制的核心原理、代码实现、故障排除、性能优化、传感器融合、无线通信、人工智能应用、在机器人、工业自动化、医疗器械、安防监控、娱乐玩具、教育科研等领域的应用,以及与其他单片机和控制方式的比较。此外,专栏还提供了项目实战案例、开源项目解析和行业发展报告,帮助读者深入了解舵机控制技术,快速掌握舵机控制技能,并了解舵机控制行业的发展趋势和技术创新。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【新手必看】:PSCAD安装流程详解与5大常见问题快速解决

# 摘要
本文主要介绍PSCAD软件的功能特点、安装前的准备工作、具体的安装流程以及安装过程中可能遇到的常见问题和解决策略。文中通过对PSCAD的实践应用和案例分析,展示了该软件在电力系统仿真中的强大功能和实际应用价值。通过对安装流程的详细指导和对常见问题的深入探讨,本文旨在为用户在使用PSCAD软件时提供便捷和有效的参考
SAP登录日志揭秘:一步步带你成为审计专家
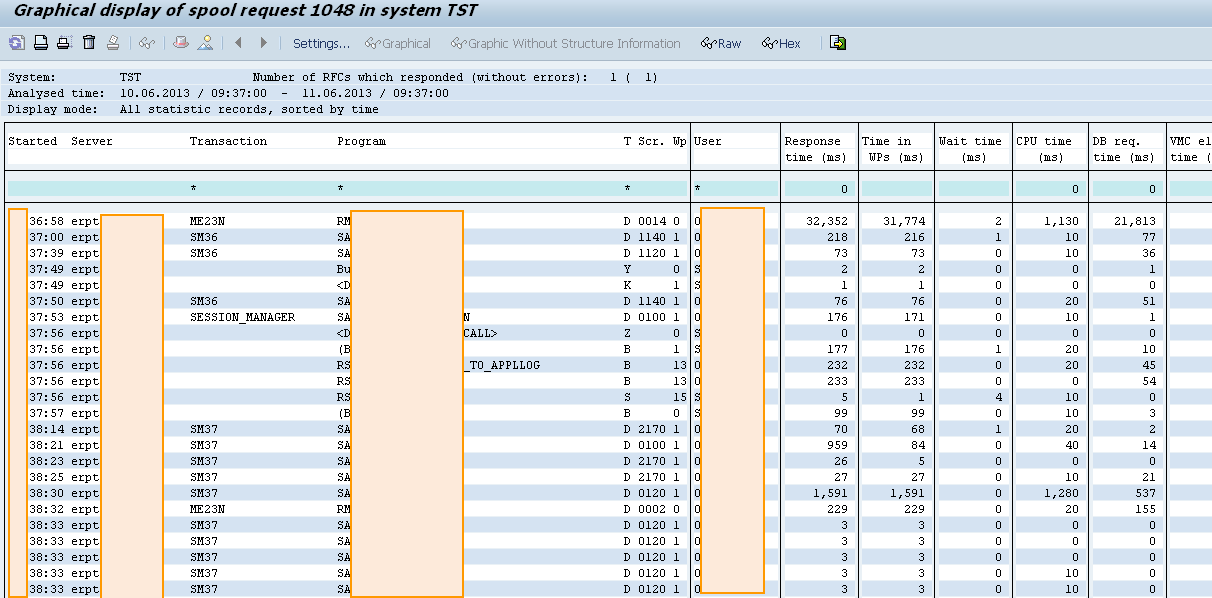
# 摘要
SAP系统作为企业核心业务平台,其日志审计对于确保系统安全性与合规性至关重要。本文从基础概念出发,详细分析了SAP日志结构,深入探讨了日志内容和分析技术,并且提供了实践技巧。在安全性与风险评估方面,本文详述了安全漏洞的类型、风险评估方法和持续监控措施。通过案例研究,揭示了审计过程中的关键问题及其解决方案,并从中提炼了最佳实践和经验教训。最后,本文展望了日志审计领域的未来趋势,包括人工
汇编语言性能优化实战:VS2022环境下的案例与实践
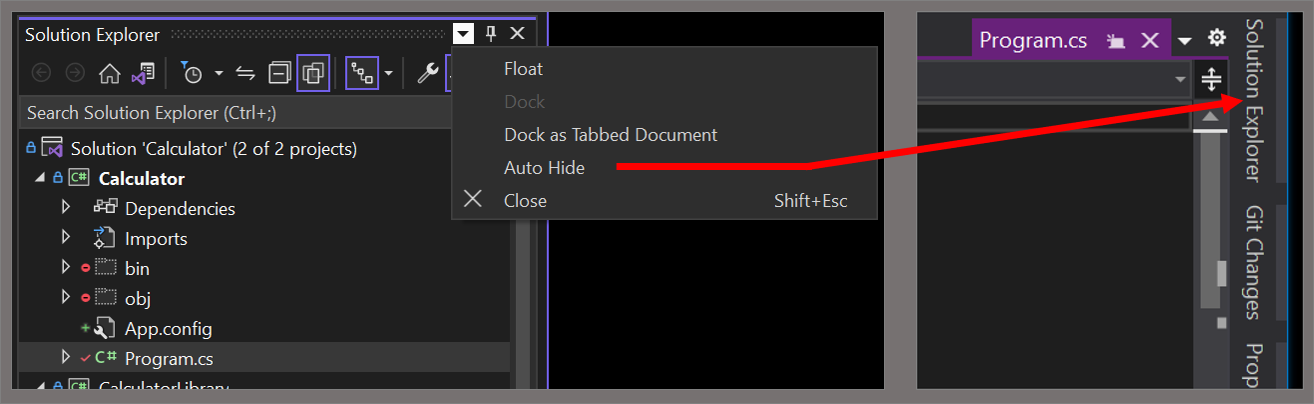
# 摘要
本文针对汇编语言的性能优化进行了系统性研究和案例分析。首先概述了汇编语言性能优化的重要性,并介绍了其基础概念和优化原理。随后,文章深入探讨了在VS2022环境下进行汇编开发的准备工作以及调试技巧,并以算法优化、数据访问优化以及多线程优化为案例,详细分析了性能优化的具体方法。第五章着重介绍了高级汇编技巧以及与C/C++的交互实践。最后,通过实战演练章节,展示
【高性能RRU安装实战指南】:专家级安装流程与技巧
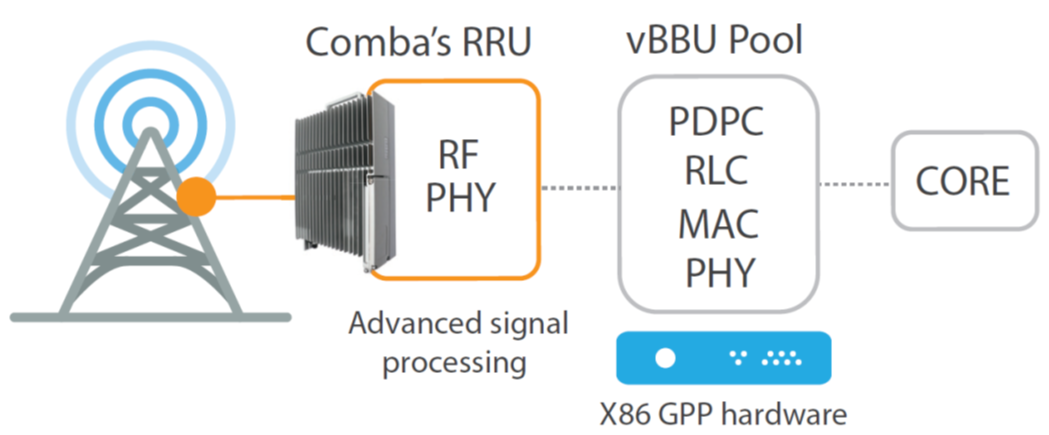
# 摘要
本文主要对无线通信系统中远程无线电单元(RRU)的安装、配置、性能调优以及故障处理进行了全面的介绍。首先概述了RRU的基础知识,然后详细阐述了高性能RRU安装的准备过程,包括安装环境评估、硬件组件熟悉、系统软件配置。随后,文章详细解析了RRU的安装步骤,涵盖机械安装、电气连接和软件配置。在性能调优与故障处理章节中,本文提供了性能监控、调优实践、常见故障诊
小样本学习全解析:从理论到高光谱图像分类的实用指南
# 摘要
小样本学习是一种高效的学习范式,尤其适用于样本稀缺的场景,如高光谱图像分类。本文全面探讨了小样本学习的基础理论、核心概念和相关算法,阐述了其在处理高光谱图像分类中面临的挑战与机遇。文中还详细讨论了几种小样本学习算法,包括模型无关元学习(MAML)和基于度量学习的方法,并通过实验设计与性能评估来展示其实践应用。最后,本文展望了小样本学习领域的未来趋势,包括零样本学习、开放集学习以及模型泛化与自适应技术,并对高光
【Oracle错误处理宝典】:ORA-01480的根因分析与预防策略
# 摘要
Oracle数据库在执行数据操作时,ORA-01480错误是一个常见问题,尤其影响字符数据类型的正确处理。本文首先概述了ORA-01480的定义及其触发条件,深入探讨了它与数据类型长度的关联,结合案例研究分析了该错误的成因。随后,文章从数据库版本、S
三菱FX5U PLC网络深度剖析:协议、连接与安全性全解析

# 摘要
本文针对三菱FX5U PLC网络进行全面的探讨与分析。文章从网络概览出发,详细介绍PLC网络协议基础,包括网络架构、通讯协议细节和数据交换原理。随后,文章深入网络连接操作,着重讲解了网络设置、通信实现及高级功能应用。在网络安全章节中,重点讨论了网络风险、防护策略、监控和维护。案例分析章节则通过实际应用来展示PLC网络在工业自动化中的应用情况,并提供故障诊断与解决的策略。最后,文章展望
掌握高效数据同步:深入理解Vector VT-System网络功能
# 摘要
网络数据同步是确保多节点间信息一致性的重要技术,在现代信息技术领域具有广泛应用。本文从基础概念入手,详细介绍了网络数据同步的原理,并以Vector VT-System网络功能为例,深入探讨了其系统架构、网络同步核心机制及数据同步技术类型。通过对Vector VT-Sys
【声子晶体的热管理特性】:COMSOL模拟案例深度剖析

# 摘要
声子晶体作为一种新兴的热管理材料,在控制和管理热量传输方面显示出独特的特性。本文首先概述了声子晶体及其热管理特性,随后详细阐述了声子晶体的理论基础,包括其定义、分类、能带理论和热传导机制。为了实证分析,本文介绍了COMSOL Multiphysics软件在声子晶体热管理研究中的应用,包括声子晶体模型的建立、模拟案例的参数设置与分析
【性能王者】:3步速成Eclipse下JFreeChart图表渲染速度提升专家

# 摘要
本文系统地探讨了JFreeChart图表库的基础知识、性能调优理论以及渲染速度提升的实践操作。首先介绍了JFreeChart的渲染原理,然后在Eclipse环境下对性能进行了理论上的分析与参数调优,并通过实践案例深入说明了图表渲染性能提升的有效方法。文章第三章着重于
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )