STM32单片机延时应用指南:从LED闪烁到传感器采样
发布时间: 2024-07-05 20:59:46 阅读量: 3 订阅数: 3 
# 1. STM32单片机延时概述**
STM32单片机延时是控制程序执行节奏的重要手段,广泛应用于LED闪烁、传感器采样、PWM波形生成等场景。延时方法主要分为循环计数延时和硬件定时器延时,各有其优缺点和适用场景。
循环计数延时简单易用,但精度受系统时钟频率影响。硬件定时器延时精度高,但配置和使用相对复杂。选择合适的延时方法,需要综合考虑精度、效率和系统资源等因素。
# 2. STM32单片机延时方法**
**2.1 循环计数延时**
循环计数延时是最简单直接的延时方法,通过循环执行空操作来消耗时间。
**2.1.1 常规循环计数延时**
```c
void delay_us(uint32_t us) {
uint32_t i;
for (i = 0; i < us * 12; i++) {
// 空操作
}
}
```
**代码逻辑分析:**
* `us`参数指定延时微秒数。
* 循环执行12次空操作,每次空操作耗时约83纳秒。
* 通过调整循环次数可以实现不同延时时间。
**2.1.2 SysTick定时器循环计数延时**
SysTick定时器是一个32位递减计数器,可以作为循环计数延时的时钟源。
```c
void delay_us_systick(uint32_t us) {
SysTick->LOAD = us * 12;
SysTick->VAL = 0;
SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk;
while ((SysTick->CTRL & SysTick_CTRL_COUNTFLAG_Msk) == 0) {}
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk;
}
```
**代码逻辑分析:**
* `us`参数指定延时微秒数。
* 将SysTick定时器计数器值设置为`us * 12`,表示12微秒的延时。
* 启动SysTick定时器。
* 等待`COUNTFLAG`标志位置1,表示计数完成。
* 停止SysTick定时器。
**2.2 硬件定时器延时**
硬件定时器提供更精确和灵活的延时方式。
**2.2.1 定时器简介**
STM32单片机有多个硬件定时器,它们可以配置为不同的模式,包括定时器模式、计数器模式和PWM模式。
**2.2.2 定时器中断延时**
```c
void delay_us_timer(uint32_t us) {
TIM2->ARR = us - 1;
TIM2->PSC = 84 - 1;
TIM2->CR1 |= TIM_CR1_CEN_Msk;
while ((TIM2->SR & TIM_SR_UIF_Msk) == 0) {}
TIM2->SR &= ~TIM_SR_UIF_Msk;
TIM2->CR1 &= ~TIM_CR1_CEN_Msk;
}
```
**代码逻辑分析:**
* `us`参数指定延时微秒数。
* 将定时器2的自动重装载寄存器(ARR)设置为`us - 1`,表示延时`us`微秒。
* 将定时器2的分频寄存器(PSC)设置为84,表示定时器时钟频率为1MHz。
* 启动定时器2。
* 等待定时器2的更新中断标志位(UIF)置1,表示计数完成。
* 清除UIF标志位。
* 停止定时器2。
**2.2.3 定时器输出比较延时**
```c
void delay_us_timer_oc(uint32_t us) {
TIM2->CCR1 = us - 1;
TIM2->PSC = 84 - 1;
TIM2->CR1 |= TIM_CR1_CEN_Msk;
while ((TIM2->SR & TIM_SR_CC1IF_Msk) == 0) {}
TIM2->SR &= ~TIM_SR_CC1IF_Msk;
TIM2->CR1 &= ~TIM_CR1_CEN_Msk;
}
```
**代码逻辑分析:**
* `us`参数指定延时微秒数。
* 将定时器2的捕获/比较寄存器1(CCR1)设置为`us - 1`,表示延时`us`微秒。
* 将定时器2的分频寄存器(PSC)设置为84,表示定时器时钟频率为1MHz。
* 启动定时器2。
* 等待定时器2的捕获/比较1中断标志位(CC1IF)置1,表示计数完成。
* 清除CC1IF标志位。
* 停止定时器2。
# 3. STM32单片机延时应用**
### 3.1 LED闪烁
LED闪烁是STM32单片机延时应用中最常见的场景之一。通过控制LED的亮灭时间,可以实现各种闪烁效果。
#### 3.1.1 循环计数延时实现LED闪烁
循环计数延时是最简单的延时方法,通过循环计数来消耗时间。实现LED闪烁的步骤如下:
1. 定义LED引脚并将其配置为输出模式。
2. 进入一个无限循环。
3. 在循环中,将LED引脚置为高电平,表示LED亮。
4. 使用循环计数延时函数延时一段时间。
5. 将LED引脚置为低电平,表示LED灭。
6. 再次使用循环计数延时函数延时一段时间。
**代码块:**
```c
#define LED_PIN GPIO_PIN_13
#define DELAY_ON_MS 1000
#define DELAY_OFF_MS 1000
void main() {
// 配置LED引脚
RCC->AHB1ENR |= RCC_AHB1ENR_GPIOCEN;
GPIOC->MODER |= GPIO_MODER_MODER13_0;
while (1) {
// LED亮
GPIOC->ODR |= GPIO_ODR_ODR13;
delay_ms(DELAY_ON_MS);
// LED灭
GPIOC->ODR &= ~GPIO_ODR_ODR13;
delay_ms(DELAY_OFF_MS);
}
}
```
**逻辑分析:**
* `RCC->AHB1ENR |= RCC_AHB1ENR_GPIOCEN;`:使能GPIOC时钟。
* `GPIOC->MODER |= GPIO_MODER_MODER13_0;`:将PC13引脚配置为输出模式。
* `GPIOC->ODR |= GPIO_ODR_ODR13;`:将PC13引脚置为高电平。
* `delay_ms(DELAY_ON_MS);`:使用循环计数延时函数延时DELAY_ON_MS毫秒。
* `GPIOC->ODR &= ~GPIO_ODR_ODR13;`:将PC13引脚置为低电平。
* `delay_ms(DELAY_OFF_MS);`:使用循环计数延时函数延时DELAY_OFF_MS毫秒。
#### 3.1.2 定时器中断延时实现LED闪烁
定时器中断延时比循环计数延时更加准确和高效。实现LED闪烁的步骤如下:
1. 配置定时器并设置中断。
2. 在中断服务函数中,控制LED的亮灭状态。
**代码块:**
```c
#define LED_PIN GPIO_PIN_13
#define TIMER_PERIOD 1000
void main() {
// 配置LED引脚
RCC->AHB1ENR |= RCC_AHB1ENR_GPIOCEN;
GPIOC->MODER |= GPIO_MODER_MODER13_0;
// 配置定时器
RCC->APB1ENR |= RCC_APB1ENR_TIM2EN;
TIM2->PSC = 80 - 1;
TIM2->ARR = TIMER_PERIOD - 1;
TIM2->DIER |= TIM_DIER_UIE;
NVIC_EnableIRQ(TIM2_IRQn);
TIM2->CR1 |= TIM_CR1_CEN;
while (1) {
// 进入低功耗模式,等待中断唤醒
__WFI();
}
}
void TIM2_IRQHandler() {
// 清除中断标志位
TIM2->SR &= ~TIM_SR_UIF;
// 控制LED亮灭状态
GPIOC->ODR ^= GPIO_ODR_ODR13;
}
```
**逻辑分析:**
* `RCC->APB1ENR |= RCC_APB1ENR_TIM2EN;`:使能TIM2时钟。
* `TIM2->PSC = 80 - 1;`:设置定时器分频系数,使定时器时钟为1MHz。
* `TIM2->ARR = TIMER_PERIOD - 1;`:设置定时器自动重装载值,使定时器每1ms中断一次。
* `TIM2->DIER |= TIM_DIER_UIE;`:使能定时器更新中断。
* `NVIC_EnableIRQ(TIM2_IRQn);`:使能TIM2中断。
* `TIM2->CR1 |= TIM_CR1_CEN;`:启动定时器。
* `__WFI();`:进入低功耗模式,等待中断唤醒。
* `TIM2_IRQHandler()`:定时器中断服务函数,控制LED亮灭状态。
### 3.2 传感器采样
传感器采样是STM32单片机延时应用的另一个重要场景。通过控制传感器采样的时间间隔,可以获取传感器数据的实时变化。
#### 3.2.1 传感器简介
传感器是一种将物理量转换为电信号的器件。常见的传感器包括温度传感器、湿度传感器、加速度传感器等。
#### 3.2.2 定时器中断延时实现传感器采样
定时器中断延时可以精确控制传感器采样的时间间隔。实现传感器采样的步骤如下:
1. 配置传感器引脚并初始化传感器。
2. 配置定时器并设置中断。
3. 在中断服务函数中,读取传感器数据。
**代码块:**
```c
#define SENSOR_PIN GPIO_PIN_0
#define TIMER_PERIOD 1000
void main() {
// 配置传感器引脚
RCC->AHB1ENR |= RCC_AHB1ENR_GPIOAEN;
GPIOA->MODER |= GPIO_MODER_MODER0_0;
// 初始化传感器
// 配置定时器
RCC->APB1ENR |= RCC_APB1ENR_TIM2EN;
TIM2->PSC = 80 - 1;
TIM2->ARR = TIMER_PERIOD - 1;
TIM2->DIER |= TIM_DIER_UIE;
NVIC_EnableIRQ(TIM2_IRQn);
TIM2->CR1 |= TIM_CR1_CEN;
while (1) {
// 进入低功耗模式,等待中断唤醒
__WFI();
}
}
void TIM2_IRQHandler() {
// 清除中断标志位
TIM2->SR &= ~TIM_SR_UIF;
// 读取传感器数据
// 处理传感器数据
}
```
**逻辑分析:**
* `RCC->AHB1ENR |= RCC_AHB1ENR_GPIOAEN;`:使能GPIOA时钟。
* `GPIOA->MODER |= GPIO_MODER_MODER0_0;`:将PA0引脚配置为输入模式。
* `RCC->APB1ENR |= RCC_APB1ENR_TIM2EN;`:使能TIM2时钟。
* `TIM2->PSC = 80 - 1;`:设置定时器分频系数,使定时器时钟为1MHz。
* `TIM2->ARR = TIMER_PERIOD - 1;`:设置定时器自动重装载值,使定时器每1ms中断一次。
* `TIM2->DIER |= TIM_DIER_UIE;`:使能定时器更新中断。
* `NVIC_EnableIRQ(TIM2_IRQn);`:使能TIM2中断。
* `TIM2->CR1 |= TIM_CR1_CEN;`:启动定时器。
* `__WFI();`:进入低功耗模式,等待中断唤醒。
* `TIM2_IRQHandler()`:定时器中断服务函数,读取传感器数据并进行处理。
# 4.1 延时精度的优化
### 4.1.1 循环计数延时的精度优化
循环计数延时精度受时钟频率影响,时钟频率越高,精度越高。对于循环计数延时,可以通过以下方法优化精度:
- **使用高精度时钟源:**STM32单片机提供多个时钟源,如内部RC振荡器、外部晶振、PLL等。选择高精度的时钟源,如外部晶振,可以提高延时精度。
- **使用硬件乘法器:**循环计数延时需要执行大量的乘法运算,使用硬件乘法器可以提高运算速度和精度。
- **使用汇编语言:**汇编语言可以直接操作硬件寄存器,避免了函数调用和编译器的开销,可以提高延时精度。
### 4.1.2 定时器延时的精度优化
定时器延时精度受定时器时钟频率和计数周期影响。以下方法可以优化定时器延时的精度:
- **使用高精度时钟源:**与循环计数延时类似,定时器延时也受时钟频率影响。选择高精度的时钟源可以提高延时精度。
- **使用较长的计数周期:**计数周期越长,延时时间越长,精度越高。但是,计数周期过长会导致定时器溢出,影响精度。
- **使用定时器预分频器:**定时器预分频器可以降低定时器时钟频率,从而延长计数周期,提高精度。
- **使用定时器比较捕获功能:**定时器比较捕获功能可以精确地测量时间间隔,可以用来校准定时器延时。
**示例代码:**
```c
// 使用定时器比较捕获功能校准定时器延时
void calibrate_timer_delay(TIM_TypeDef *timer) {
// 配置定时器为比较捕获模式
timer->CR1 |= TIM_CR1_CEN | TIM_CR1_URS;
timer->CCMR1 |= TIM_CCMR1_CC1S_0;
timer->CCER |= TIM_CCER_CC1E;
// 等待定时器稳定
while (!(timer->SR & TIM_SR_UIF));
// 清除更新中断标志
timer->SR &= ~TIM_SR_UIF;
// 启动定时器
timer->CR1 |= TIM_CR1_CEN;
// 等待定时器溢出
while (!(timer->SR & TIM_SR_UIF));
// 清除更新中断标志
timer->SR &= ~TIM_SR_UIF;
// 计算校准值
uint32_t calibration_value = timer->CNT;
// 停止定时器
timer->CR1 &= ~TIM_CR1_CEN;
// 返回校准值
return calibration_value;
}
```
# 5.1 PWM波形生成
### 5.1.1 PWM波形简介
PWM(脉宽调制)是一种调制技术,通过改变脉冲的宽度来控制输出信号的平均值。PWM波形由一系列重复的脉冲组成,每个脉冲都有一个固定的周期和占空比。占空比定义为脉冲宽度与周期的比值,它决定了输出信号的平均值。
### 5.1.2 定时器输出比较PWM波形生成
STM32单片机可以通过定时器输出比较功能来生成PWM波形。输出比较功能允许定时器在达到特定值时触发一个事件。通过配置定时器的时钟源、预分频器和比较值,可以生成具有特定频率和占空比的PWM波形。
**代码块:**
```c
/* 初始化定时器3为PWM模式 */
TIM3->CR1 |= TIM_CR1_CEN;
TIM3->PSC = 1000; // 预分频器为 1000
TIM3->ARR = 1000; // 自动重装载寄存器为 1000
/* 设置比较值,占空比为 50% */
TIM3->CCR1 = 500;
/* 启用输出比较通道 1 */
TIM3->CCER |= TIM_CCER_CC1E;
```
**代码逻辑分析:**
* `TIM3->CR1 |= TIM_CR1_CEN;`:使能定时器 3。
* `TIM3->PSC = 1000;`:设置预分频器为 1000,即定时器时钟频率为系统时钟频率的 1/1000。
* `TIM3->ARR = 1000;`:设置自动重装载寄存器为 1000,即 PWM 波形的周期为 1000 个时钟周期。
* `TIM3->CCR1 = 500;`:设置比较值 1 为 500,即 PWM 波形的占空比为 50%。
* `TIM3->CCER |= TIM_CCER_CC1E;`:使能输出比较通道 1,输出 PWM 波形。
**参数说明:**
* `TIM3->CR1`:定时器控制寄存器 1,用于控制定时器的使能、时钟源和预分频器等。
* `TIM3->PSC`:预分频器寄存器,用于设置定时器时钟的预分频值。
* `TIM3->ARR`:自动重装载寄存器,用于设置定时器的重装载值。
* `TIM3->CCR1`:比较值寄存器 1,用于设置输出比较通道 1 的比较值。
* `TIM3->CCER`:输出比较控制寄存器,用于控制输出比较通道的使能和极性等。
# 6. STM32单片机延时常见问题及解决方法**
**6.1 延时不准确**
**6.1.1 循环计数延时不准确**
* **问题描述:**循环计数延时的精度受时钟频率的影响,在不同的时钟频率下,延时时间会有偏差。
* **解决方法:**
* 使用SysTick定时器作为时钟源,SysTick定时器具有固定的时钟频率,可以提高延时精度的稳定性。
* 使用硬件定时器作为时钟源,硬件定时器的时钟频率通常比SysTick定时器更高,可以进一步提高延时精度。
**6.1.2 定时器延时不准确**
* **问题描述:**定时器延时的时间精度受定时器时钟频率、预分频器和重装载值的影响,如果这些参数设置不当,会导致延时时间不准确。
* **解决方法:**
* 根据所需的延时时间,计算合适的定时器时钟频率、预分频器和重装载值。
* 使用示波器或其他测量工具验证延时时间的准确性。
**6.2 延时效率低**
**6.2.1 循环计数延时效率低**
* **问题描述:**循环计数延时需要占用大量的CPU时间,在需要频繁延时的场合,会影响系统的整体性能。
* **解决方法:**
* 避免使用循环计数延时,转而使用硬件定时器延时。
* 使用低功耗延时模式,在延时期间让CPU进入低功耗状态。
**6.2.2 定时器延时效率低**
* **问题描述:**定时器延时需要占用定时器资源,如果同时需要多个延时操作,可能会导致定时器资源不足,影响延时效率。
* **解决方法:**
* 合理分配定时器资源,避免同时使用多个定时器进行延时操作。
* 使用SysTick定时器作为延时时钟源,SysTick定时器是一个全局定时器,可以同时为多个延时操作提供时钟源。
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 STM32 单片机延时的方方面面,从基本原理到高级应用。它涵盖了 SysTick 和 HAL 库的延时函数、延时精度的影响因素和优化策略,以及延时在各种应用中的指南,包括 LED 闪烁、传感器采样、中断处理和嵌入式系统。此外,它还探讨了延时在工业应用、医疗设备、汽车电子、人工智能和大数据处理中的关键作用。通过深入的分析和示例,本专栏为工程师提供了全面的指南,帮助他们掌握 STM32 单片机延时技术,并将其有效应用于各种项目中。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
FOC控制中的表锁问题全解析:深度解读,彻底解决

# 1. FOC控制简介
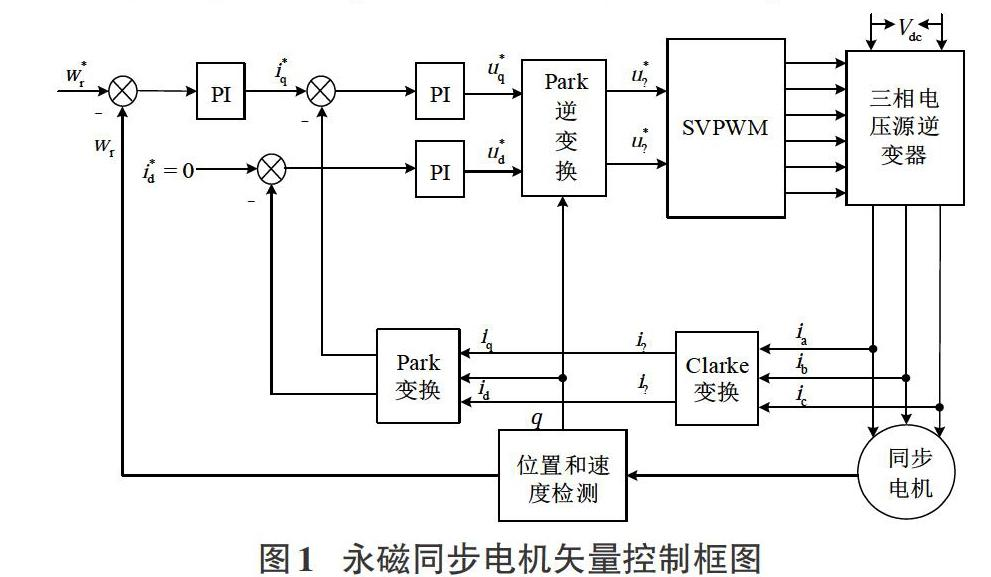
FOC(Field-Oriented Control)控制是一种先进的电机控制技术,通过对电机的磁场进行定向控制,实现高精度、高效率的电机控制。FOC控制的核心思想是将交流电机等效为直流电机,通过控制电机的磁场方向和幅值来控制电机的转速和转矩。
FOC控制具有以下优点:
- 高精度:FOC控制可以实现高精度的转速和转矩控制,满足工业自动化、机器人等领域对精度的要求。
- 高效率
资深工程师技术提升:掌握数据库性能优化核心技术,成为数据库性能专家

# 1. 数据库性能优化基础**
数据库性能优化是一个持续的过程,涉及到对数据库系统进行调整和改进,以提高其性能和效率。数据库性能优化可以带来以下好处:
- 提高应用程序响应时间,改善用户体验
- 降低硬件成本,通过优化现有系统避免昂贵的硬件升级
- 提高数据库可用性,减少宕机时间和数据丢失的风险
数据库性能优化涉及到以下关键步骤:
- 监控和分析数据库性能:收集有关数据库性能指
单片机程序设计中的行业应用:智能家居、工业控制、医疗设备,探索嵌入式世界的无限可能

# 1. 单片机程序设计基础**
单片机是一种集成了处理器、
MSP430单片机C语言在工业控制中的应用:电机控制、数据采集的实战指南
# 1. MSP430单片机C语言基础**
MSP430单片机是一款低功耗、高性能的16位微控制器,广泛应用于工业控制、物联网和嵌入式系统等领域。其C语言编程具有以下特点:
* **高效性:**MSP430单片机采用RISC架构,指令集精简,执行效率高。
* **低功耗:**MSP430单片机采用先进的
PIC16单片机C语言异常处理机制:应对意外情况和提高系统稳定性,让单片机更可靠
# 1. PIC16单片机异常处理机制概述**
PIC16单片机异常处理机制是一种在异常事件发生时,自动执行特定操作的机制。异常事件可以是内部事件(例如复位)或外部事件(例如中断)。异常处理机制允许单片机快速有效地对异常事件做出响应,从而确保系统的稳定性和可靠性。
异常处理机制的原理是,当发生异常事件时,单片机将跳转到一个预定义的地址,称为异常向量。异常向量指向一个中断服务程序(ISR),该程序包含处理异常事件所需的代码。
单片机定时器应用指南:时间控制和事件调度详解
# 1. 单片机定时器基础**
单片机定时器是一种用于生成精确时间间隔的硬件外设。它通常由一个计数器和一个控制寄存器组成。计数器递增或递减,直到达到预设值,然后触发一个中断或事件。
定时器具有多种模式,包括自由运行模式、定时模式和捕获模式。在自由运行模式下,计数器不断递增,而定时模式下,计数器在达到预设值时触发中断。捕获模式允许定时器捕获外部事件的发生时间。
定时器在单片机系统中至关重要,因为它提供了时间控制和事件调度
Kubernetes容器编排系统基础知识与实战应用:容器化时代的利器
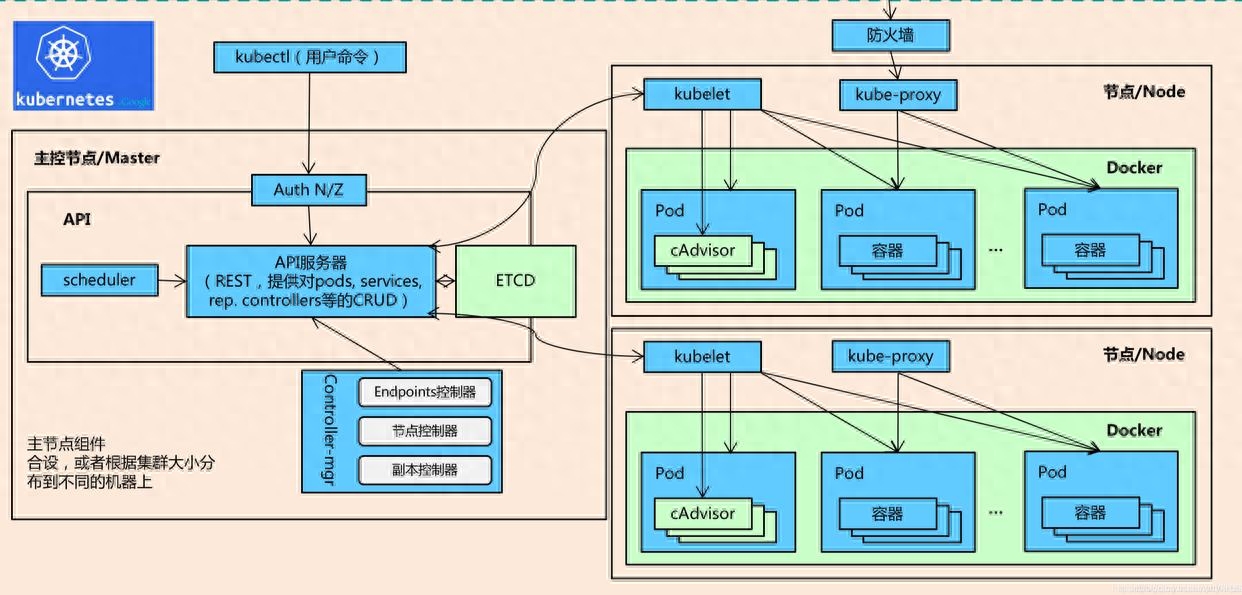
# 1. Kubernetes容器编排系统简介
Kubernetes是一个开源的容器编排系统,用于自动化部署、管理和扩展容器化应用程序。它提供了一个统一的平台,用于管理跨多个主机和云环境的容器。Kubernetes通过其强大的功能和灵活性,已成为容器编排的行业标准。
Kubernetes的核心概念包括容器、Pod、Deployment和Service。容器是轻
揭秘MySQL死锁问题:如何分析并彻底解决

# 1. MySQL死锁概述
MySQL死锁是一种数据库系统中常见的现象,它发生在两个或多个事务同时等待对方释放锁定的资源时。死锁会导致事务无法继续执行,从而影响数据库的性能和可用性。
### 死锁的成因
死锁通常由以下原因引起:
* **资源竞争:**多个事务同时尝试获取同一
单片机C语言开发环境选择:IDE与编译器的利弊权衡
# 1. 单片机C语言开发环境概述**
单片机C语言开发环境是进行单片机开发的必备工具,它提供了代码编辑、编译、调试等功能,极大地提高了开发效率。开发环境主要由集成开发环境(IDE)和编译器组成,它们各有优势和劣势。
IDE集成了代码编辑器、调试器和分析工具,为开发者提供了一个全面的开发环境。而编译器则负责将源代码编译成可执行代码,具有编译效率高、可移植性强等优点。在实际开发中,根据项目复杂度和个人偏好,可以灵活选择使用IDE或编译器,或结合使用两者,以达到最佳的开发效果。
# 2. 集成开发环境(IDE)的利弊
### 2.1 IDE的优势
#### 2.1.1 集成的开发环境
状态空间模型在工程领域的应用:优化系统性能和可靠性的必备知识

# 1. 状态空间模型的基本原理**
状态空间模型是一种数学框架,用于描述动态系统的行为。它由两个方程组成:状态方程和观测方程。状态方程描述系统内部状态随时间的变化,而观测方程描述系统输出与状态之间的关系。
状态空间模型的优点在于它可以对系统的动态行为进行统一的描述,无论系统的复杂性如何。它还允许使用强大的数学工具来分析和控制系统。例如,状态反馈控制是一种基于状态空间模
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )