图像分割深度解析:策略、挑战与实战技巧
发布时间: 2024-11-21 16:32:01 阅读量: 36 订阅数: 32 

图像分割实战-系列教程10:U2NET显著性检测实战 原理解读
# 1. 图像分割概述
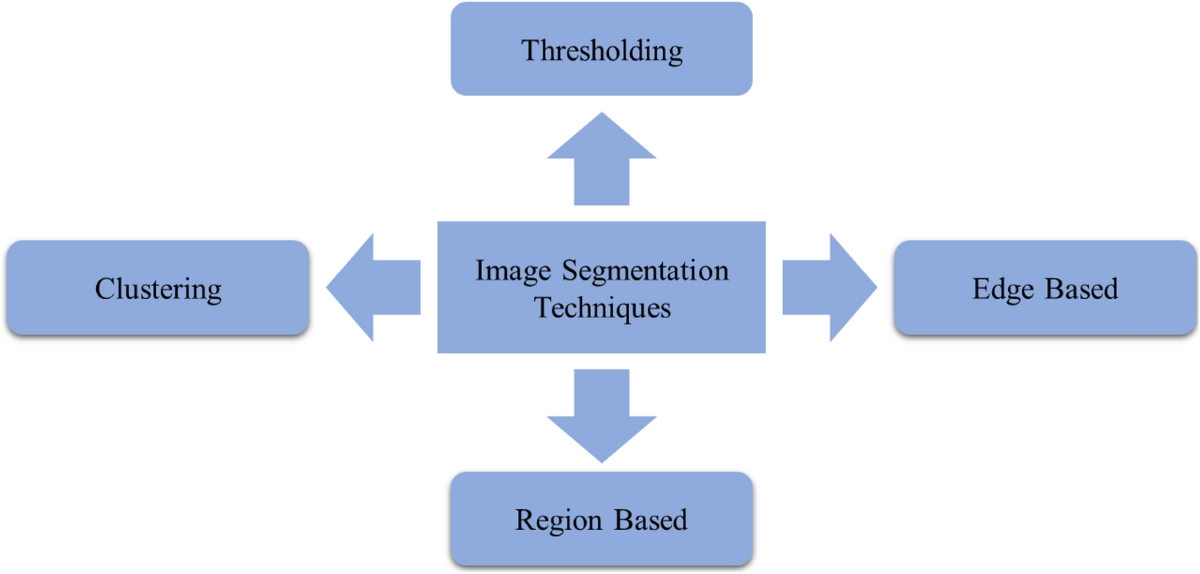
在计算机视觉领域,图像分割是一种将图像分割成多个部分或对象的技术,旨在简化或改变图像的表示方式,使其更易于分析和处理。图像分割在医学成像、自动驾驶、视频监控等多个行业有着广泛的应用。它涉及识别图像中具有相似特征(如颜色、纹理、亮度)的区域,并将这些区域作为单个对象处理。图像分割是计算机视觉与图像处理中的一个基本且关键步骤,常常位于图像识别与分析流程的前端。理解不同类型的分割方法,对于后续的图像处理与分析至关重要,也是图像分析深入理解的第一步。
# 2. 图像分割策略深入分析
## 2.1 基于阈值的图像分割方法
### 2.1.1 全局阈值分割
全局阈值分割是一种简单而有效的图像分割策略,它基于一个全局不变的阈值将图像划分为目标和背景。这种分割方法假设图像的亮度分布是双峰的,目标和背景分别对应于这两个峰值。一个常见的全局阈值分割算法是Otsu算法,它通过寻找一个阈值,以最大化目标和背景类间的方差来自动计算阈值。
在实际应用中,Otsu算法可以在各种图像分割软件和编程库中找到,例如OpenCV。以下是使用Python和OpenCV实现Otsu阈值分割的代码示例:
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('path_to_image.jpg', 0)
# 应用Otsu的二值化方法
ret, thresh = cv2.threshold(image, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
# 显示图像
cv2.imshow('Otsu Thresholding', thresh)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
在该代码中,`cv2.threshold`函数用于执行阈值分割操作,其中`cv2.THRESH_OTSU`标志告诉函数自动计算阈值。`ret`变量将返回计算得到的阈值。`thresh`变量存储了二值化的结果,其中值为0的像素点被划分到背景,而值为255的像素点被划分到前景。
### 2.1.2 自适应阈值分割
全局阈值分割方法不适用于光照条件不均匀的情况,自适应阈值分割技术应运而生。自适应阈值分割为图像的每个像素都计算一个阈值,通常根据该像素周围的局部区域的亮度计算得到。这种分割方法能够有效地处理具有不均匀光照条件的图像。
以下是使用Python和OpenCV实现自适应阈值分割的代码示例:
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('path_to_image.jpg', 0)
# 应用自适应阈值
thresh = cv2.adaptiveThreshold(image, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 11, 2)
# 显示图像
cv2.imshow('Adaptive Thresholding', thresh)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
在这段代码中,`cv2.adaptiveThreshold`函数用于执行自适应阈值分割操作,其中`cv2.ADAPTIVE_THRESH_GAUSSIAN_C`代表自适应阈值类型为高斯型,`cv2.THRESH_BINARY`是分割类型,`11`是邻域大小,`2`是应用于邻域的常数。这会为图像中每个像素生成一个基于其周围邻域亮度的阈值。
## 2.2 基于区域的图像分割技术
### 2.2.1 区域生长
区域生长是一种基于种子点选择和区域扩展的图像分割方法。该方法首先选取一个或多个种子点,然后根据相似性准则将相邻的像素点合并到种子区域中。这个过程不断迭代,直至区域内所有像素都满足相似性条件。区域生长算法的成功很大程度上依赖于种子点的选择和相似性准则的设计。
区域生长的实现可以分为以下步骤:
1. 选择种子点:通常选择在目标区域内手动选择或者通过预处理步骤自动确定。
2. 确定相似性准则:例如颜色、灰度、纹理等。
3. 扩展区域:将与种子点相似的新像素点加入到种子区域。
4. 迭代:重复步骤3直至区域不再扩展。
### 2.2.2 分水岭算法
分水岭算法是一种基于拓扑理论的图像分割方法,该方法从标记图像中的局部最小值开始,将其视为流域盆地。然后,算法模拟降雨过程,根据图像的梯度信息逐步淹没低洼区域,最后在不同流域盆地之间构建分水岭,从而达到分割的目的。
分水岭算法的步骤如下:
1. 标记局部最小值点。
2. 对每个标记的最小值点进行"降雨"模拟。
3. 模拟过程中,不同流域之间建立水坝,即分水岭线。
4. 连接所有的分水岭线,完成图像分割。
以下是使用Python和OpenCV进行分水岭算法的示例代码:
```python
import cv2
import numpy as np
from skimage.feature import peak_local_max
from skimage.segmentation import watershed
from scipy import ndimage
# 读取图像并转换为灰度图
image = cv2.imread('path_to_image.jpg', 0)
# 计算梯度幅值
grad = ndimage.distance_transform_edt(image)
localMax = peak_local_max(grad, indices=False, min_distance=20, labels=image)
# 标记局部最大值
markers = np.zeros_like(image)
markers[localMax] = 1
# 应用分水岭算法
labels = watershed(-grad, markers, mask=image)
# 可视化结果
from skimage.color import label2rgb
image_labels = label2rgb(labels, image=image, bg_label=0)
cv2.imshow("Segmented image", image_labels)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
在该代码中,`peak_local_max`函数用于找到局部最大值,而`watershed`函数实现了分水岭算法。`labels`数组表示分割后的区域,其中每个整数值代表一个区域。`label2rgb`函数用于将分割结果可视化。
## 2.3 边缘检测与图像分割
### 2.3.1 Sobel算子和Canny边缘检测
边缘检测是图像分割中的关键技术之一,其目的是识别图像中亮度变化显著的区域。边缘检测可以通过计算图像一阶或二阶导数来实现。Sobel算子是一种常用的边缘检测方法,它通过在水平和垂直方向上应用两个卷积核来计算梯度的近似值。Canny边缘检测算子则是一种更复杂的边缘检测技术,它使用高斯滤波器平滑图像,然后使用非极大值抑制和滞后阈值来确定边缘。
以下是使用Python和OpenCV进行Canny边缘检测的示例代码:
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('path_to_image.jpg', 0)
# 应用Canny边缘检测
edges = cv2.Canny(image, threshold1=100, threshold2=200)
# 显示边缘检测结果
cv2.imshow('Canny Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
在这段代码中,`cv2.Canny`函数执行边缘检测,`threshold1`和`threshold2`参数是用于滞后阈值的两个阈值,这两个阈值用于确定边缘的强弱。
### 2.3.2 高级边缘检测技术
高级边缘检测技术通常涉及更复杂的算法,例如基于机器学习或深度学习的方法。例如,深度学习中的卷积神经网络(CNN)可以通过学习大量的带标签图像来自动学习边缘检测的特征表示。这些方法相比于传统的边缘检测算子,通常在处理复杂图像时表现得更为鲁棒和精确。
下面是一个使用深度学习边缘检测的简单介绍,不涉及具体代码实现,因为深度学习方法通常需要大量的数据预处理、模型训练和调优步骤:
深度学习边缘检测模型的实现通常包括以下步骤:
1. 数据收集:收集并预处理大量带标签的边缘检测图像数据集。
2. 模型设计:设计一个深度神经网络模型,如U-Net、Mask R-CNN等,用于边缘检测任务。
3. 模型训练:使用训练数据对模型进行训练,调整模型的权重和偏置。
4. 模型评估:使用验证数据集对模型进行评估,以确定其性能。
5. 模型部署:将训练好的模型部署到实际的应用场景中,以进行边缘检测。
在深度学习领域,边缘检测通常会与其他任务(如分割或分类)相结合,在整个图像处理流程中发挥作用。
# 3. 图像分割中的挑战与解决方法
### 3.1 高噪声环境下的分割问题
在现实世界的应用中,图像往往包含了大量的噪声,这些噪声可以来源于成像设备、传输过程或是环境因素。噪声的存在会严重干扰图像分割的准确性,因此,图像分割技术在高噪声环境下尤其面临挑战。
#### 3.1.1 噪声模型与滤波技术
噪声在图像中通常可以被建模为加性噪声或乘性噪声。为了有效地处理噪声,我们需要先了解其类型与特性。常见的噪声模型包括高斯噪声、椒盐噪声等。针对不同类型噪声,我们使用不同的滤波技术。
以高斯噪声为例,高斯滤波是一种常用的空间域滤波技术,能够平滑图像,

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
计算机视觉专栏深入探讨了计算机视觉领域的各个方面,提供全面的指南和教程。它涵盖了从基础概念到高级技术的广泛主题,包括深度学习、OpenCV、CNN图像识别、物体检测、特征提取、3D重建、姿态估计、图像分割、视觉框架比较、数据增强和图像融合。专栏旨在帮助初学者和专家提升他们的计算机视觉技能,优化视觉系统性能,并解决实际应用中的挑战。通过深入的分析、代码示例和实战技巧,专栏为读者提供了在计算机视觉领域取得成功的全面资源。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【硬件实现】:如何构建性能卓越的PRBS生成器

# 摘要
本文全面探讨了伪随机二进制序列(PRBS)生成器的设计、实现与性能优化。首先,介绍了PRBS生成器的基本概念和理论基础,重点讲解了其工作原理以及相关的关键参数,如序列长度、生成多项式和统计特性。接着,分析了PRBS生成器的硬件实现基础,包括数字逻辑设计、FPGA与ASIC实现方法及其各自的优缺点。第四章详细讨论了基于FPGA和ASIC的PRBS设计与实现过程,包括设计方法和验
NUMECA并行计算核心解码:掌握多节点协同工作原理
# 摘要
NUMECA并行计算是处理复杂计算问题的高效技术,本文首先概述了其基础概念及并行计算的理论基础,随后深入探讨了多节点协同工作原理,包括节点间通信模式以及负载平衡策略。通过详细说明并行计算环境搭建和核心解码的实践步骤,本文进一步分析了性能评估与优化的重要性。文章还介绍了高级并行计算技巧,并通过案例研究展示了NUMECA并行计算的应用。最后,本文展望了并行计
提升逆变器性能监控:华为SUN2000 MODBUS数据优化策略

# 摘要
逆变器作为可再生能源系统中的关键设备,其性能监控对于确保系统稳定运行至关重要。本文首先强调了逆变器性能监控的重要性,并对MODBUS协议进行了基础介绍。随后,详细解析了华为SUN2000逆变器的MODBUS数据结构,阐述了数据包基础、逆变器的注册地址以及数据的解析与处理方法。文章进一步探讨了性能数据的采集与分析优化策略,包括采集频率设定、异常处理和高级分析技术。
小红书企业号认证必看:15个常见问题的解决方案
# 摘要
本文系统地介绍了小红书企业号的认证流程、准备工作、认证过程中的常见问题及其解决方案,以及认证后的运营和维护策略。通过对认证前准备工作的详细探讨,包括企业资质确认和认证材料
FANUC面板按键深度解析:揭秘操作效率提升的关键操作
# 摘要
FANUC面板按键作为工业控制中常见的输入设备,其功能的概述与设计原理对于提高操作效率、确保系统可靠性及用户体验至关重要。本文系统地介绍了FANUC面板按键的设计原理,包括按键布局的人机工程学应用、触觉反馈机制以及电气与机械结构设计。同时,本文也探讨了按键操作技巧、自定义功能设置以及错误处理和维护策略。在应用层面,文章分析了面板按键在教育培训、自动化集成和特殊行业中的优化策略。最后,本文展望了按键未来发展趋势,如人工智能、机器学习、可穿戴技术及远程操作的整合,以及通过案例研究和实战演练来提升实际操作效率和性能调优。
# 关键字
FANUC面板按键;人机工程学;触觉反馈;电气机械结构
【UML类图与图书馆管理系统】:掌握面向对象设计的核心技巧

# 摘要
本文旨在探讨面向对象设计中UML类图的应用,并通过图书馆管理系统的需求分析、设计、实现与测试,深入理解UML类图的构建方法和实践。文章首先介绍了UML类图基础,包括类图元素、关系类型以及符号规范,并详细讨论了高级特性如接口、依赖、泛化以及关联等。随后,文章通过图书馆管理系统的案例,展示了如何将UML类图应用于需求分析、系统设计和代码实现。在此过程中,本文强调了面向对象设计原则,评价了UML类图在设计阶段
【虚拟化环境中的SPC-5】:迎接虚拟存储的新挑战与机遇
# 摘要
本文旨在全面介绍虚拟化环境与SPC-5标准,深入探讨虚拟化存储的基础理论、存储协议与技术、实践应用案例,以及SPC-5标准在虚拟化环境中的应用挑战。文章首先概述了虚拟化技术的分类、作用和优势,并分析了不同架构模式及SPC-5标准的发展背景。随后
硬件设计验证中的OBDD:故障模拟与测试的7大突破
# 摘要
OBDD(有序二元决策图)技术在故障模拟、测试生成策略、故障覆盖率分析、硬件设计验证以及未来发展方面展现出了强大的优势和潜力。本文首先概述了OBDD技术的基础知识,然后深入探讨了其在数字逻辑故障模型分析和故障检测中的应用。进一步地,本文详细介绍了基于OBDD的测试方法,并分析了提高故障覆盖率的策略。在硬件设计验证章节中,本文通过案例分析,展示了OBDD的构建过程、优化技巧及在工业级验证中的应用。最后,本文展望了OBDD技术与机器学习等先进技术的融合,以及OBDD工具和资源的未来发展趋势,强调了OBDD在AI硬件验证中的应用前景。
# 关键字
OBDD技术;故障模拟;自动测试图案生成
海康威视VisionMaster SDK故障排除:8大常见问题及解决方案速查

# 摘要
本文全面介绍了海康威视VisionMaster SDK的使用和故障排查。首先概述了SDK的特点和系统需求,接着详细探讨了
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )