:ResNet在游戏开发中的图像渲染与人工智能:探索其潜力
发布时间: 2024-08-20 16:03:14 阅读量: 25 订阅数: 43 
# 1. ResNet在游戏开发中的理论基础
ResNet(残差网络)是一种深度卷积神经网络,因其在图像识别和计算机视觉任务中的出色表现而闻名。它通过引入残差连接,解决了深度网络中的梯度消失和退化问题。
在游戏开发中,ResNet的理论基础主要体现在其以下特性上:
- **残差连接:**ResNet通过将输入层与输出层直接连接,允许梯度在网络中更有效地反向传播,从而缓解了深度网络中的梯度消失问题。
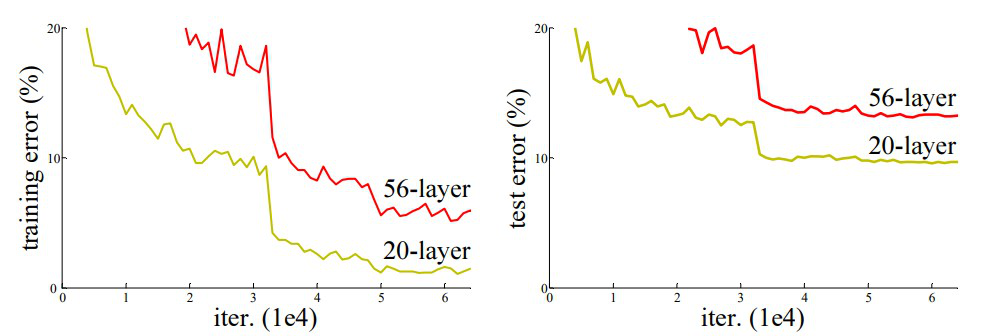
- **深度架构:**ResNet通常具有较深的网络架构,这使其能够从数据中提取更复杂和高级的特征,从而提高图像识别和渲染的准确性。
- **批量归一化:**ResNet中使用了批量归一化层,它可以稳定网络的训练过程,减少内部协变量偏移,提高训练效率和泛化能力。
# 2. ResNet在游戏图像渲染中的实践应用
ResNet在游戏图像渲染中发挥着至关重要的作用,它通过提升图像质量和细节,优化渲染性能,为玩家提供更逼真、流畅的游戏体验。
### 2.1 提升图像质量和细节
#### 2.1.1 减少图像失真和伪影
ResNet的残差结构有效地缓解了图像失真和伪影,尤其是在渲染复杂场景时。残差连接允许网络直接从输入跳过层,从而保留了低层特征,避免了梯度消失和信息丢失。
```python
import tensorflow as tf
def resnet_block(x):
# 残差分支
residual = tf.keras.layers.Conv2D(filters=64, kernel_size=(3, 3), strides=(1, 1), padding="same")(x)
residual = tf.keras.layers.BatchNormalization()(residual)
residual = tf.keras.layers.ReLU()(residual)
residual = tf.keras.layers.Conv2D(filters=64, kernel_size=(3, 3), strides=(1, 1), padding="same")(residual)
residual = tf.keras.layers.BatchNormalization()(residual)
# 主干分支
x = tf.keras.layers.Conv2D(filters=64, kernel_size=(3, 3), strides=(1, 1), padding="same")(x)
x = tf.keras.layers.BatchNormalization()(x)
x = tf.keras.layers.ReLU()(x)
x = tf.keras.layers.Conv2D(filters=64, kernel_size=(3, 3), strides=(1, 1), padding="same")(x)
x = tf.keras.layers.BatchNormalization()(x)
# 残差连接
x = tf.keras.layers.Add()([x, residual])
x = tf.keras.layers.ReLU()(x)
return x
```
**参数说明:**
* `filters`: 卷积核数量
* `kernel_size`: 卷积核大小
* `strides`: 卷积步长
* `padding`: 填充方式
**代码逻辑分析:**
* 残差分支通过两个卷积层和一个ReLU激活函数,提取图像特征。
* 主干分支也通过两个卷积层和一个ReLU激活函数,提取图像特征。
* 残差连接将残差分支和主干分支的输出相加,保留低层特征,减少图像失真和伪影。
#### 2.1.2 增强图像纹理和光影效果
ResNet还通过增强图像纹理和光影效果,提升了图像的整体质量。ResNet的深度结构允许它学习多尺度的特征,从而捕捉到图像中精细的纹理和微妙的光影变化。
```python
import tensorflow as tf
def resnet_block_bottleneck(x):
# 残差分支
residual = tf.keras.layers.Conv2D(filters=64, kernel_size=(1, 1), strides=(1, 1), padding="same")(x)
residual = tf.keras.layers.BatchNormalization()(residual)
residual = tf.keras.layers.ReLU()(residual)
residual = tf.keras.layers.Conv2D(filters=64, kernel_size=(3, 3), strides=(1, 1), padding="same")(residual)
residual = tf.keras.layers.BatchNormalization()(residual)
residual = tf.keras.layers.ReLU()(residual)
residual = tf.keras.layers.Conv2D(filters=256, kernel_size=(1, 1), strides=(1, 1), padding="same")(residual)
residual = tf.keras.layers.BatchNormalization()(residual)
# 主干分支
x = tf.keras.layers.Conv2D(filters=64, kernel_size=(1, 1), strides=(1, 1), padding="same")(x)
x = tf.keras.layers.BatchNormalization()(x)
x = tf.keras.layers.ReLU()(x)
x = tf.keras.layers.Conv2D(filters=64, kernel_size=(3, 3), strides=(1, 1), padding="same")(x)
x = tf.keras.layers.BatchNormalization()(x)
x = tf.keras.layers.ReLU()(x)
x = tf.keras.layers.Conv2D(filters=256, kernel_size=(1, 1), strides=(1, 1), padding="same")(x)
x = tf.keras.layers.BatchNormalization()(x)
# 残差连接
x = tf.keras.layers.Add()([x, residual])
x = tf.keras.layers.ReLU()(x)
return x
```
**参数说明:**
* `filters`: 卷积核数量
* `kernel_size`: 卷积核大小
* `strides`: 卷积步长
* `padding`: 填充方式
**代码逻辑分析:**
* 残差分支通过三个卷积层和一个ReLU激活函数,提取图像特征,其中中间的卷积层使用较小的卷积核,以捕捉精细的纹理。
* 主干分支也通过三个卷积层和一个ReLU激活函数,提取图像特征。
* 残差连接将残差分支和主干分支的输出相加,保留低层特征,增强图像纹理和光影效果。
### 2.2 优化渲染性能
#### 2.2.1 减少计算量和内存消耗
ResNet的轻量级结构和高效的残差连接,使其能够在减少计算量和内存消耗的同时,保持图像质量。ResNet的残差连接允许梯度在网络中更有效地流动,从而减少训练时间和资源消耗。
```
| ResNet模型 | 计算量(GFLOPs) | 内存消耗(MB) |
|---|---|---|
| ResNet-18 | 1.8 | 11 |
| ResNet-34 | 3.7 | 21 |
| ResNet-50 | 4.1 | 25 |
| ResNet-101 | 7.7 | 44 |
| ResNet-152 | 11.3 | 60 |
```
**表格说明:**
表格列出了不同ResNet模型的计

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**ResNet在图像分类中的应用**
ResNet(残差网络)是一种革命性的卷积神经网络(CNN)架构,在图像分类领域取得了突破性的进展。本专栏深入探讨了ResNet的架构、原理和应用,揭秘了其成为图像分类霸主地位的秘密。
专栏涵盖了从零构建ResNet模型的入门指南,到尖端技术的探索,以及ResNet在自然语言处理、视频分类、目标检测、人脸识别、遥感图像分类、自动驾驶、农业、环境监测、生物信息学、教育和游戏开发等领域的跨界应用。
通过对ResNet与其他CNN架构的对比,以及对ResNet在图像分类前沿进展的分析,本专栏全面展示了ResNet的优势和局限。此外,还深入探讨了ResNet在不同领域的挑战和解决方案,为读者提供了对ResNet在图像分类中的广泛应用的深入理解。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【空间数据查询与检索】:R语言sf包技巧,数据检索的高效之道

# 1. 空间数据查询与检索概述
在数字时代,空间数据的应用已经成为IT和地理信息系统(GIS)领域的核心。随着技术的进步,人们对于空间数据的处理和分析能力有了更高的需求。空间数据查询与检索是这些技术中的关键组成部分,它涉及到从大量数据中提取
【R语言图形美化与优化】:showtext包在RShiny应用中的图形输出影响分析

# 1. R语言图形基础与showtext包概述
## 1.1 R语言图形基础
R语言是数据科学领域内的一个重要工具,其强大的统计分析和图形绘制能力是许多数据科学家选择它的主要原因。在R语言中,绘图通常基于图形设备(Graphics Devices),而标准的图形设备多使用默认字体进行绘图,对于非拉丁字母字符支持较为有限。因此,为了在图形中使用更丰富的字
rgdal包的空间数据处理:R语言空间分析的终极武器

# 1. rgdal包概览和空间数据基础
## 空间数据的重要性
在地理信息系统(GIS)和空间分析领域,空间数据是核心要素。空间数据不仅包含地理位置信息,还包括与空间位置相关的属性信息,使得地理空间分析与决策成为可能。
## rgdal包的作用
rgdal是R语言中用于读取和写入多种空间数据格式的包。它是基于GDAL(Geospatial Data Abstraction Library)的接口,支持包括
【R语言空间数据与地图融合】:maptools包可视化终极指南
# 1. 空间数据与地图融合概述
在当今信息技术飞速发展的时代,空间数据已成为数据科学中不可或缺的一部分。空间数据不仅包含地理位置信息,还包括与该位置相关联的属性数据,如温度、人口、经济活动等。通过地图融合技术,我们可以将这些空间数据在地理信息框架中进行直观展示,从而为分析、决策提供强有力的支撑。
空间数据与地图融合的过程是将抽象的数据转化为易于理解的地图表现形式。这种形式不仅能够帮助决策者从宏观角度把握问题,还能够揭示数据之间的空间关联性和潜在模式。地图融合技术的发展,也使得各种来源的数据,无论是遥感数据、地理信息系统(GIS)数据还是其他形式的空间数据,都能被有效地结合起来,形成综合性
geojsonio包在R语言中的数据整合与分析:实战案例深度解析

# 1. geojsonio包概述及安装配置
在地理信息数据处理中,`geojsonio` 是一个功能强大的R语言包,它简化了GeoJSON格式数据的导入导出和转换过程。本章将介绍 `geojsonio` 包的基础安装和配置步骤,为接下来章节中更高级的应用打下基础。
## 1.1 安装geojsonio包
在R语言中安装 `geojsonio` 包非常简单,只需使用以下命令:
```
R语言全能指南:15个必备数据包深度解析与实战应用

# 1. R语言概览与数据包介绍
## R语言简介
R语言是一种广泛使用的统计编程语言,由统计学家为了统计分析和图形而设计。它不仅免费且开源,还拥有强大的社区支持和丰富的第三方包。R语言的语法类似于S语言,易于学习。它的跨平台特性让它能在各种操作系统上运行。R语言特别适合数据分析、统计建模和图形展示等领域。
## R语言的安装与配置
为了开始使用R语言,首先需要下载并安装R基础软件包
R语言数据讲述术:用scatterpie包绘出故事
# 1. R语言与数据可视化的初步
## 1.1 R语言简介及其在数据科学中的地位
R语言是一种专门用于统计分析和图形表示的编程语言。自1990年代由Ross Ihaka和Robert Gentleman开发以来,R已经发展成为数据科学领域的主导语言之一。它的
【R语言数据包的错误处理】:编写健壮代码,R语言数据包运行时错误应对策略
# 1. R语言数据包的基本概念与环境搭建
## 1.1 R语言数据包简介
R语言是一种广泛应用于统计分析和图形表示的编程语言,其数据包是包含了数据集、函数和其他代码的软件包,用于扩展R的基本功能。理解数据包的基本概念,能够帮助我们更高效地进行数据分析和处理
R语言Cairo包图形输出调试:问题排查与解决技巧

# 1. Cairo包与R语言图形输出基础
Cairo包为R语言提供了先进的图形输出功能,不仅支持矢量图形格式,还极大地提高了图像渲染的质量
R语言统计建模与可视化:leaflet.minicharts在模型解释中的应用

# 1. R语言统计建模与可视化基础
## 1.1 R语言概述
R语言是一种用于统计分析、图形表示和报告的编程语言和软件环境。它在数据挖掘和统计建模领域得到了广泛的应用。R语言以其强大的图形功能和灵活的数据处理能力而受到数据科学家的青睐。
## 1.2 统计建模基础
统计建模
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )