车载传感器数据同步:为什么一致性如此重要及其实现方法
发布时间: 2025-01-09 20:23:40 阅读量: 3 订阅数: 7 

若依WebSocket集成
# 摘要
车载传感器数据同步是智能交通系统和高级驾驶辅助系统(ADAS)中的关键技术,它确保了车辆各传感器之间数据的一致性与准确性。本文从数据同步与一致性的基础理论出发,探讨了数据同步的重要性和一致性模型。随后,详细介绍了实现数据同步的协议、算法以及相关技术,如时间敏感网络(TSN)和实时操作系统(RTOS)。文章进一步通过技术实践和应用案例分析,展示了数据同步在实际交通系统中的应用。最后,本文对车载传感器数据同步的新兴技术和未来挑战进行了展望,并提出了相关的行业标准和政策建议,旨在指导未来的研究方向。
# 关键字
车载传感器;数据同步;数据一致性;时间敏感网络;实时操作系统;智能交通系统
参考资源链接:[自动驾驶:车载传感器的作用与标定详解](https://wenku.csdn.net/doc/17ffepa9oq?spm=1055.2635.3001.10343)
# 1. 车载传感器数据同步的基本概念
随着智能交通系统和高级驾驶辅助系统(ADAS)的发展,车载传感器数据同步成为了研究的热点。本章旨在介绍车载传感器数据同步的基础概念,为后续章节中数据一致性的理论基础、实现方法以及技术实践等内容奠定基础。
## 1.1 数据同步的重要性
在车载系统中,数据同步指的是确保不同传感器和计算节点之间数据的时间对齐和内容一致性。随着车辆的自动化程度提高,对数据实时性和准确性的要求也越来越高。数据同步对于提升车辆的运行效率和安全性,以及实现复杂决策过程至关重要。
## 1.2 数据同步的挑战
然而,车载网络环境的动态变化,如网络延迟、丢包以及节点故障等,给数据同步带来了诸多挑战。为了克服这些困难,就需要深入理解数据一致性的理论基础,并开发高效可靠的同步技术。
在接下来的章节中,我们将进一步探讨数据一致性的理论基础,以及如何通过特定的技术手段和实践案例来应对这些挑战。
# 2. 数据一致性的理论基础
## 2.1 数据同步与一致性的重要性
### 2.1.1 数据同步的基本原理
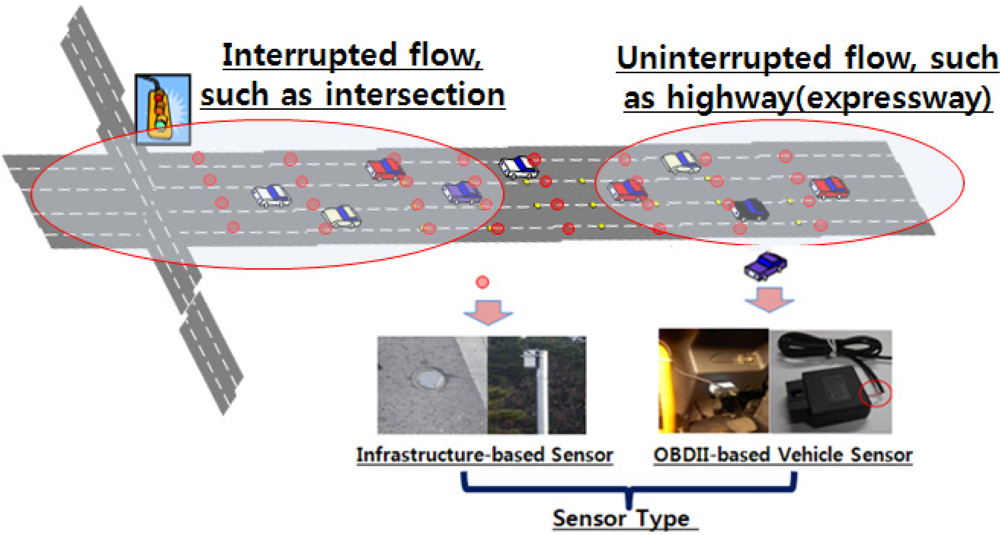
数据同步是确保来自多个数据源的实时更新得以在所有相关系统间保持一致的过程。在车载传感器数据同步场景中,它至关重要,因为车辆在运行过程中会产生大量的传感器数据,这些数据需要实时且准确地共享给车上的其他系统,例如车载信息系统、高级驾驶辅助系统(ADAS)、车载诊断系统(OBD)等。
数据同步基本原理涉及以下几个方面:
- **数据复制**:确保数据在多个副本之间保持一致性。
- **数据更新**:在数据发生变化时,同步机制需要迅速更新所有相关副本。
- **冲突解决**:当多个副本同时更新时,需要有机制来解决数据冲突。
**数据复制**可以通过两种主要的技术实现:**同步复制**和**异步复制**。同步复制保证数据在写入时即同步更新到所有副本,这可能导致系统性能下降;异步复制则允许数据在一段时间后才进行更新,这样可以减轻系统负担,但数据一致性在时间上可能有所延迟。
**数据更新**在车载环境中尤其重要,例如,GPS位置更新需要实时同步到导航系统和紧急呼叫系统中。更新机制必须高效且可靠,以保证即使在车辆高速移动的情况下也能准确无误地同步数据。
**冲突解决**是数据同步中最具挑战性的部分,特别是在分布式系统中。例如,如果两个传感器同时检测到障碍物并发送警报,系统需要一个明确的优先级或合并策略来确定最终应该向驾驶员显示哪种信息。
### 2.1.2 数据一致性对车载系统的意义
车辆电子控制单元(ECU)之间的数据一致性对于车辆的安全运行至关重要。从自动驾驶汽车到传统燃油车的电子燃油喷射系统,各种车载系统都在不同程度上依赖于准确且一致的数据。
- **安全关键系统**,如制动系统或转向系统,如果数据不一致,可能会导致严重的安全事故。
- **信息娱乐系统**,虽然不像安全系统那样关键,但也需要数据一致性来提供准确的导航和音频视频服务。
- **车载诊断系统**,用于持续监控车辆健康状况,其数据一致性对于预防性维护和及时故障检测至关重要。
为了保持数据一致性,车载系统通常需要集成复杂的同步机制和一致性协议。这些机制的目的是最小化数据冲突和延迟,并在面对网络中断或硬件故障时提供鲁棒性。
## 2.2 数据一致性的理论模型
### 2.2.1 分布式系统中的一致性模型
在分布式系统中,数据一致性模型定义了数据副本之间保持一致性的规则和限制。最重要的数据一致性模型包括:
- **强一致性**:一旦数据更新被提交,所有后续的读取操作都必须返回最新值。
- **弱一致性**:系统不保证立即的一致性,但最终所有的副本在没有新更新的情况下将达到一致状态。
- **最终一致性**:一种较弱的一致性模型,它保证如果不再有数据更新,那么最终所有的副本都会变得一致。
在车载系统中,强一致性是最理想的情况,但实际中往往很难达到,因为需要牺牲系统性能或可扩展性。因此,很多情况下会使用弱一致性或最终一致性模型,通过在可接受的时间范围内实现数据的一致性来平衡性能和一致性需求。
### 2.2.2 一致性级别的分类与比较
一致性级别通常分类为:
- **线性一致性**:在分布式系统中,这种级别的数据一致性模型是最严格的一种,要求操作看起来是按照全局唯一的时间顺序执行的。
- **顺序一致性**:要求操作被正确地序列化,但不必遵循全局时间顺序。
- **因果一致性**:保证有因果关系的操作看起来是有序发生的,但与因果无关的操作可以无序执行。
- **会话一致性**:客户端在会话过程中看到的数据是一致的,但不同客户端的数据可能不一致。
不同的一致性级别在性能和一致性保证之间提供了不同的权衡。例如,线性一致性提供了最强的一致性保证,但可能会引起较高的延迟和吞吐量下降。而因果一致性可能在保持较低延迟的同时,牺牲了一些一致性强度。因此,选择哪种一致性模型取决于车载系统具体的应用场景和需求。
## 2.3 数据一致性的挑战与策略
### 2.3.1 网络延迟与丢包问题
网络延迟和丢包是分布式系统中导致数据同步问题的主要因素。在车载系统中,由于车辆的移动性,网络环境可能会经常变化,网络连接可能会变得不稳定,导致数据同步延迟或丢失。
为了解决这些问题,可以采取以下策略:
- **缓存机制**:允许系统缓存数据,并在网络稳定时进行同步。
- **重传机制**:在网络丢包发生时,数据同步机制应该能够自动重新发送丢失的数据。
- **冗余数据同步**:通过多个路径发送数据以确保即使部分路径不可靠,数据仍然可以送达。
- **超时机制**:为数据同步操作设置超时,并采取措施(如重试或通知用户)来应对超时情况。
### 2.3.2 系统故障与数据恢复策略
分布式系统中的节点故障、电源故障或硬件故障都可能导致数据不一致。为了应对这些故障,系统需要实现数据恢复策略,以确保在故障发生后能够快速恢复数据一致性。
数据恢复策略可能包括:
- **日志记录**:记录所有数据操作日志,以便在故障后能够回放操作以恢复数据状态。
- **检查点机制**:定期创建系统状态的快照,以便在出现

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了车载传感器的作用和标定的重要性。从基础应用到故障诊断,它涵盖了 18 个关键点,为智能汽车技术提供了全面指南。专栏还提供了车载传感器技术演进和故障排除的速成课程,以及掌握核心原理和精确校准的 5 个步骤。它深入研究了车载传感器网络的设计,以确保数据传输的稳定性和效率。此外,它还介绍了 8 项关键技术,保障车辆安全运行。专栏提供了专家指南,帮助读者精确匹配和高效实施车载传感器,并掌握关键技术以提升感知能力。它还分享了 15 个实战经验,帮助快速诊断和修复车载传感器故障。最后,专栏强调了标准测试方法和一致性的重要性,并提供了应对环境挑战和解决信号干扰的创新解决方案。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
物联网安全新利器:轻量级标识密钥的实现要点与安全性分析

# 摘要
物联网安全面临着独特的挑战,特别是在设备数量庞大、资源有限的环境下。轻量级标识密钥作为一种有效的安全机制,能够确保身份认证和数据加密,从而维护物联网系统的整体安全性。本文系统地阐述了轻量级密码学的基本概念、特性及其在物联网中的应用需求。在深入分析了轻量级算法选择标准的基础上
STM32 I2C通信终极指南:手把手教你成为HAL库和STM32CubeMX大师(24小时精通I2C通信)
# 摘要
STM32微控制器是广泛应用于嵌入式系统中的高性能处理器。本文深入探讨了STM32平台上的I2C通信机制,包括基础理论、实践指南、高级应用,以及故障诊断与排除。首先,介绍了I2C通信协议的工作原理、数据传输机制、硬件特性以及电气特性。随后,提供了使用HAL库进行I2C配置、软件实现、以及STM32CubeMX配置向导的实用指南。文章还涵盖
【电磁兼容与干扰解析】:2023年电机设计仿真考量与优化策略
# 摘要
本文对电磁兼容与干扰的理论基础进行了综述,并重点分析了电机设计中电磁干扰源的产生及其对电磁兼容性的影响。通过介绍电磁兼容仿真工具的特点、环境配置、以及仿真流程的详细步骤,提供了电机设计中有效识别和处理电磁干扰的方法。此外,文章探讨了在电路设计、硬件设计及软件控制方面采取的电磁干扰抑制策略,以及这些策略如何提高电机设计的电磁兼容性。最后,通过案例分析
实时监控P400系统:性能与资源使用分析的终极指南
# 摘要
本文对P400实时监控系统的性能监控理论和实践进行了全面分析。首先介绍了实时监控系统的基本概念及其性能监控的重要性,然后详细阐述了P400系统的架构特点、性能监控的理论模型以及性能监控指标的选择和数据分析方法。接着,文章对P400系统中的CPU、内存、磁盘和网络I/O资源的使用情况进行了深入分析,并探讨了资源使用中的常见问题及其预防措施。第四章展示了实时监控工具的选择与配置,以及
【UC3842实战手册】:如何解决现代电源设计中的兼容性挑战

# 摘要
UC3842控制器是电源设计中广泛使用的一款集成电路,它在电源管理领域发挥了重要的作用。本文首先介绍了UC3842控制器的基本概念及其在电源设计中的应用,并深入探讨了其工作原理、功能架构和电路设计基础。接着,针对UC3842在实际电源设计中可能遇到的兼容性问题,本文提供了诊断分析和解决方案,帮助工程师优化电路设计,提高产品的性能和可靠性。此外,本文还探讨了UC3842在实际应用中的技巧与案例分析,并展望了其
JDY-40性能优化手册:7大策略助你提升系统效率
# 摘要
本论文旨在介绍性能优化的基本概念,并对JDY-40系统进行详细的性能评估与优化策略分析。首先,本文对JDY-40系统进行全面概述,随后探讨了针对硬件、网络设备、操作系统和应用软件的优化策略,涉及服务器升级、网络延迟优化、系统个性化配置、软件版本管理等方面。接着,本文分析了系统架构优化,
光伏电站监控系统设计:架构、数据同步与安全性的三重奏
# 摘要
本文综合探讨了光伏电站监控系统的构建,涵盖了系统架构设计、数据同步技术、系统安全性加固以及未来发展趋势等多个维度。首先,文章从理论和实践两个层面介绍了监控系统的架构模型、关键技术选型以及模块化设计和高可用性策略。其次,对数据同步的必要性、分类特点、实时同步解决方案和安全性考量进行了深入分析。在系统安全性方面,本文阐述了安全性的基本理论、标准、实践措施以及应急响应与灾难恢复策略。通过一个具体的光伏电站
E900V21E刷机失败日志分析:专家解读与解决方案

# 摘要
刷机失败问题是许多技术爱好者和专业维修人员经常遇到的问题,它可能导致设备无法启动、数据丢失甚至硬件损坏。本文详细介绍了刷机失败问题的概览,并深入探讨了刷机失败日志的理论基础,包括常见错误类型、日志结构解读和分析方法。实践应用章节提供了日志分析工具的使用、错误定位与分析、优化调整建议。案例分析部分通过具体实例深入剖析了失败原因及预防措施。最后,本文总结了刷机失败预防的最佳实践和刷机后的总结学习,旨在为读者提供一套系统的解
【Notes R9文档管理高手课】:打造专业文档库的终极指南

# 摘要
随着信息技术的快速发展,专业文档管理成为提高组织效率和保障信息安全的重要手段。本文首先概述了文档管理的重要性及其在提升工作效率和协作流畅度、保障信息安全与合规性方面的必要性。随后深入探讨了文档生命周期管理,包括文档的创建、版本控制、存储检索、归档与
Vue与Baidu Map深度整合:7个步骤打造高效离线地图应用
# 摘要
本文全面探讨了Vue框架与Baidu Map的整合过程,涵盖了从基础配置到交互原理,再到高效离线地图应用构建及性能优化与安全加固的完整步骤。文章首先介绍Vue项目初始化与Baidu Map API的引入和配置,接着深入分析Vue组件与Baidu Map API间的交互原理,强调数据绑定与事件处理在地图应用中的重
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )