C++实时阴影渲染:理论与实践的完美结合
发布时间: 2024-12-10 06:46:21 阅读量: 1 订阅数: 15 
# 1. 实时渲染技术概述
渲染技术是计算机图形学中的核心内容,尤其在游戏开发、虚拟现实和视觉效果等领域中扮演着至关重要的角色。实时渲染技术让图像能够在用户可感知的时间内生成,它允许用户与计算机生成的3D世界进行交互,体验到几乎无延迟的视觉反馈。
实时渲染需要高度优化的算法来保证图像能够以至少每秒30帧甚至更高帧率的速度进行渲染。随着硬件性能的提升,现代实时渲染技术不仅满足于快速渲染,而且追求更高的真实性和视觉效果。
在本章中,我们将对实时渲染技术的基本概念进行介绍,包括渲染管线的基础理论、实时渲染的基本要求和挑战,以及为后续章节中将深入探讨的关键技术进行铺垫。我们还将简要了解实时渲染中涉及的数学知识,比如矩阵变换、投影和着色器编程等。
实时渲染不仅要求开发者精通图形编程,而且还要有对硬件性能的深刻理解。C++语言由于其执行效率高和对硬件访问的灵活性,成为了进行实时渲染开发的首选语言。通过本系列文章,我们将探索C++在实时渲染中的运用,并深入讨论如何利用它实现高质量的阴影渲染。
# 2. C++编程基础与图形学理论
## 2.1 C++在图形编程中的应用
### 2.1.1 C++的内存管理和性能优势
C++是一种静态类型、编译式编程语言,其性能优势很大程度上来自于对内存管理和资源控制的精细操作。在图形编程中,高效的内存利用和低延迟是追求高性能渲染的关键。C++提供了直接的内存操作能力,允许程序员手动管理内存分配和释放,这对于需要处理大量数据和复杂场景的实时渲染来说至关重要。
C++通过指针、引用、构造函数和析构函数提供了高度的控制力。例如,在创建和销毁图形对象时,开发者可以精确地控制资源的分配和回收,从而避免内存泄漏和其他内存相关的问题。智能指针(如std::unique_ptr和std::shared_ptr)的引入,则进一步简化了内存管理,同时保持了手动控制资源释放的能力。
在实时渲染场景中,C++性能优势的另一个重要方面是其执行速度。C++编译器通常能够生成高度优化的机器码,减少了指令执行时间和提高了计算效率。此外,C++允许直接使用硬件加速功能,例如使用SIMD(单指令多数据)指令集进行高效的数据处理,这是图形渲染中常见的优化手段。
### 2.1.2 C++标准模板库在图形编程中的运用
C++标准模板库(STL)为图形编程提供了丰富的数据结构和算法实现,极大地简化了开发流程。在图形编程中,STL的容器类如std::vector和std::map经常用于存储几何数据、纹理和渲染状态等。这些容器类支持动态数据管理,能够以接近最优的时间复杂度执行插入、查找和删除等操作,对于快速迭代和资源管理是极其有价值的。
此外,STL中的算法如std::sort、std::find、std::transform等,提供了高效的数据操作能力,使开发者能够专注于图形逻辑的实现,而不是底层数据处理的细节。例如,在处理大量顶点数据时,可以利用std::sort对顶点进行排序,以便更有效地进行批处理渲染。
STL还包含一些用于处理并发的工具,如std::thread、std::mutex和std::condition_variable,这些工具在现代图形编程中越来越重要,尤其是在多核处理器上进行渲染优化时。使用STL中的线程库能够简化多线程编程,使得图形渲染任务可以并行处理,从而提高性能。
## 2.2 图形学基础理论
### 2.2.1 光线与阴影的基本原理
光线与阴影的处理是实时渲染中构建真实感图像的核心组成部分。在现实世界中,阴影是因为光线被物体阻挡而产生的,其结果是在被照射面上形成了一块光线未能直接照射到的区域。
在图形学中,阴影的生成通常可以通过阴影映射(Shadow Mapping)或者阴影体积(Shadow Volumes)等技术实现。阴影映射技术通过渲染场景的深度图从光源的视角开始,然后将这些深度信息用来判断一个像素是否在阴影中。如果一个像素的深度值比光源视角下该位置的深度值要大,那么它就是在阴影中。
阴影体积技术则是通过计算光源和物体之间产生的轮廓线来确定阴影边界。这些轮廓线在三维空间中扩展成一个体积,称为阴影体积。如果一个像素位于这个体积内,则它处于阴影之中。
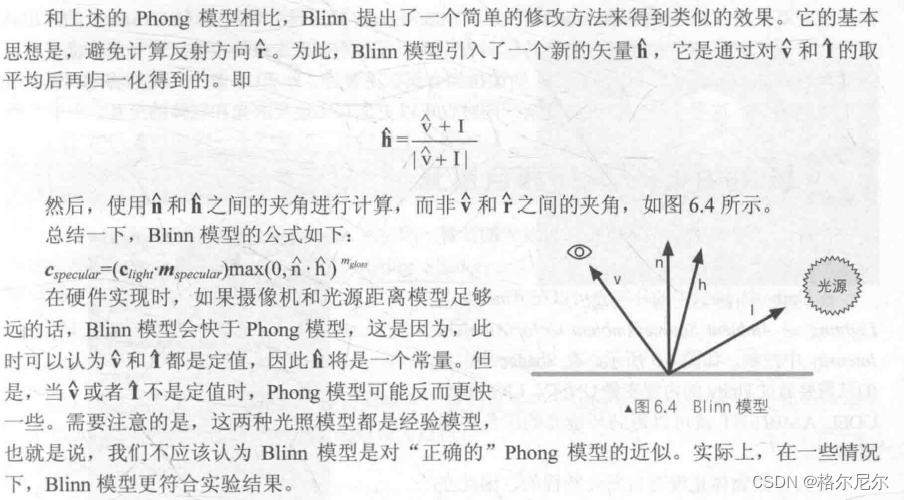
### 2.2.2 着色器和渲染管线的概念
在图形编程中,着色器是实现渲染效果的关键部分。着色器是一种运行在GPU上的小程序,它能够对图形渲染管线中的顶点或像素进行操作。着色器语言(如GLSL和HLSL)允许开发者以一种非常接近硬件的方式编写代码,从而利用GPU的并行处理能力。
着色器分为顶点着色器(Vertex Shader)、片元着色器(Fragment Shader)、几何着色器(Geometry Shader)、曲面细分着色器(Tessellation Shader)和计算着色器(Compute Shader)等类型。每种着色器负责渲染管线中的不同阶段,例如顶点着色器负责顶点坐标变换,片元着色器则负责最终像素的颜色计算。
渲染管线是一个由多个阶段组成的序列,它定义了渲染过程的步骤。现代图形管线通常从应用程序提交的顶点数据开始,经过顶点着色器进行变换和光照处理,然后通过光栅化过程转换为像素,再经过片元着色器处理,最终输出到屏幕。
```glsl
// 示例:GLSL中的顶点着色器代码段
#version 330 core
layout (location = 0) in vec3 aPos;
uniform mat4 model;
uniform mat4 view;
uniform mat4 projection;
void main()
{
gl_Position = projection * view * model * vec4(aPos, 1.0);
}
```
该代码段展示了顶点着色器对顶点位置的变换。其中,`model`、`view`和`projection`矩阵分别是模型矩阵、视图矩阵和投影矩阵,用于实现从世界坐标到裁剪坐标的转换。
## 2.3 矩阵变换和投影
### 2.3.1 矩阵在三维变换中的应用
矩阵变换在图形学中是实现图形变换的基础技术,它包括了平移、旋转、缩放等操作。在三维空间中,变换可以通过4x4矩阵来实现,因为这样的矩阵能够包含三个空间维度和一个透视分量。在图形学中,4x4矩阵广泛应用于模型变换、视图变换和投影变换等。
在模型变换中,我们通过修改矩阵来实现模型相对于世界坐标系的位置调整;在视图变换中,我们使用矩阵来确定摄像机的位置和朝向;而在投影变换中,矩阵用于将三维坐标投影到二维屏幕上,同时还保持了视角和深度信息。
矩阵乘法在渲染管线中十分重要,因为它允许连续变换,只需将相应的矩阵相乘即可。这使得对于每个顶点,可以连续应用多个变换而无需每次单独计算。
### 2.3.2 正交投影与透视投影的区别和应用
投影变换在渲染管线中负责将三维世界中的物体转换成二维屏幕上的图像。常见的投影类型包括正交投影和透视投影。
正交投影不考虑透视效果,它会将物体保持原有的比例,但不缩放远处物体的大小。这使得正交投影常用于工程绘图和用户界面元素渲染等场景,因为它能提供准确的尺寸信息。
透视投影则能模拟人眼观察世界的方式,即远处的物体显得更小。这种投影能够为场景带来深度感,因此在真实感渲染中更为常用。在透视投影中,视角越远的物体显示得越小,这更符合我们对现实世界的感知。
选择合适的投影类型依赖于所需渲染的场景和目标。例如,对于建筑设计可视化,正交投影可能是最佳选择,因为它能提供一致的尺寸标准。而对于第一人称射击游戏,透视投影则能提供更真实的视觉体验。
```glsl
// 示例:GLSL中的正交投影矩阵的计算
mat4 orthoProjectionMatrix(float left, float right, float bottom, float top, float near, float far) {
mat4 matrix = mat4(1.0);
matrix[0][0] = 2.0 / (right - left);
matrix[1][1] = 2.0 / (top - bottom);
matrix[2][2] = -2.0 / (far - near);
matrix[3][0] = -(right + left) / (right - left);
matrix[3][1] = -(top + bottom) / (top - bottom);
matrix[3][2] = -(far + near) / (far - near);
return matrix;
}
```
上述代码展示了在GLSL中如何计算一个正交投影矩阵。通过设置适当的左、右、下、上和近远平面的值,可以生成对应于视图范围的投影矩阵。
# 3. 实时阴影渲染技术深入
在第三章中,我们将深入探讨实时阴影渲染技术,这个领域的技术不断进步,直接影响了游戏和其他实时渲染应用的质量和性能。我们会首先介绍实时阴影技术的不同分类,然后讨论如何选择合适的算法并进行优化,最后探讨抗锯齿和图像后处理技术在增强阴影效果中的应用。
## 3.1 实时阴影技术的分类
在实时渲染领域,阴影的处理方式多种多样,但它们可以被大致分为两大类:软阴影和硬阴影。这两种阴影的生成方式和视觉效果有明显差异,对渲染性能的影响也各不相同。
### 3.1.1 软阴影与硬阴影的区别
硬阴影是一种视觉效果,在光源照射下,阴影的边缘是清晰锐利的。硬阴影通常出现在光源为点光源的场景中,比如太阳光。硬阴影的实现相对简单,它常用于需要强调物体轮廓的场合。
软阴影则呈现出更加自然和真实的视觉效果,它的边缘有一定的模糊度。软阴影的生成比较复杂,因为它需要考虑到光源的大小和距离。在软阴影中,离光源越近的阴影边缘越清晰,而远离光源的地方阴影边缘则越模糊。软阴影能更好地模拟现实世界中光源的物理特性,提供更丰富的视觉层次感。
### 3.1.2 光源的类型和影响
光源的类型对阴影的渲染效果有直接影响。硬阴影通常通过点光源或聚光灯来实现,而软阴影则更依赖于面光源、穹顶光源或者大范围的环境光。
- 点光源:在渲染硬阴影时,通常使用简单的阴影映射技术,如阴影贴图(Shadow Maps)。
- 面光源:为了渲染软阴影,可以使用较复杂的采样技术,如阴影贴图的PCF(Percentage-Closer Filtering)技术。
## 3.2 算法选择与优化
选择合适的阴影算法对于渲染质量和性能都有很大影响。以下是一些常用实时阴影算法的分析,以及在优化和跨平台兼容性方面的考虑。
### 3.2.1 常见实时阴影算法分析
- 阴影贴图(Shadow Maps):这是一种常用的实时阴影算法,它通过从光源视角渲染场景来建立深度信息,并存储在一个贴图中。然后在实际渲染时,通过比较场景中每个点到光源的距离和阴影贴图中的深度值来决定是否在阴影中。这种方法简单,但是可能会出现阴影失真等问题。
- 阴影体积(Shadow Volumes):这种方法通过计算光源和遮挡物之间的几何体积来确定阴影区域。它产生的阴影边缘十分锐利,适用于硬阴影的渲染,但是对渲染性能要求较高。
- 阴影贴图(Cascaded Shadow Maps, CSM):为了处理视距内不同距离的阴影细节,CSM将视域分为若干级联,每个级联采用不同分辨率的阴影贴图。这种方法可以较好地平衡渲染质量和性能。
### 3.2.2 性能优化与跨平台兼容性
实时渲染应

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 C++ 在实时渲染技术中的应用,涵盖了广泛的主题,包括:
* 结合 OpenGL 实现高效的 2D 渲染
* 资源管理策略以优化内存使用
* 构建粒子系统以创建动态世界
* 多线程渲染技术以提高效率
* 探索 Vulkan API 以利用下一代图形功能
* 延迟渲染与光栅化的比较和最佳实践
* 高质量抗锯齿技术,包括 MSAA 和 SSAA
* 渲染引擎架构设计以构建可扩展系统
* 视觉效果渲染以实现逼真的视觉体验
* 材质和纹理管理策略以优化渲染性能
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Docker基础入门】:掌握Docker技术,开启云原生之旅

# 摘要
Docker作为一种流行的容器化技术,在软件开发和部署领域中扮演着重要角色。本文从Docker技术的基础知识讲起,逐步深入到安装、配置、镜像制作与管理、容器实践应用以及企业级应用与实践。通过系统性地介绍Docker环境的搭建、命令行操作、网络与存储配置、镜像的构建优化、镜像仓库的维护,以及容器化应用的部署和监控,本文旨在为读者提供全面的Docker使
【HFSS仿真新手速成】:5个步骤带你精通边界与端口设置
# 摘要
本文全面介绍了HFSS仿真软件在电磁仿真领域的应用,特别关注于边界条件和端口设置的基础知识与进阶技巧。首先概述了HFSS仿真和基础设置的重要性,随后深入探讨了边界条件的理论基础、设置步骤、以及对仿真结果的影响。第三章详细解析了端口设置的理论与实践操作,并分析了其对
【Python电子表格自动化速成】:从入门到精通的一步到位指南
# 摘要
随着信息技术的发展,Python在电子表格自动化领域的应用越来越广泛。本文首先概述了Python电子表格自动化的基本概念,随后详细介绍了Python基础、电子表格自动化工具的选择与配置、实战演练以及高级功能拓展。本文通过深入探讨数据处理、分析、可视化和报告生成等关键环节,展示了如何利用Python及其库(如Pandas、Matplotlib/Seaborn)高效地自动化处理电子表格任
【AmapAuto协议效率提升秘籍】:车辆调度新策略全解析
# 摘要
本文综述了AmapAuto协议在车辆调度领域的应用和高效调度策略的实现。首先,概述了车辆调度问题的历史和发展的基础理论,包括不同调度算法的分类和优化目标。然后,详细分析了在AmapAuto协议指导下,如何设计实时高效调度策略的算法框架,并通过实践案例对策略的有效性进行验证。接下来,本文探讨了AmapAuto协议的实战应用,包
【大型项目代码质量守护者】:PowerArtist在大型项目中的应用案例
# 摘要
本论文旨在全面介绍PowerArtist工具,从基础理论到实际应用,再到高级技巧和案例研究。首先概述了PowerArtist工具,并探讨了代码质量的重要性及其度量方法。接着,文章详细阐述了PowerArtist的核心功能,如静态代码分析、代码度量和缺陷检测技术,并介绍其集成和部署策略。第三章通过实践案例分析了工
【CDD数据库性能优化】:揭秘进阶技巧,提升数据库响应速度
# 摘要
本文主要探讨了CDD数据库性能优化的各个方面,从理论基础到实践应用,再到高可用性策略和高级技巧。首先介绍了CDD数据库的架构理解和性能优化的基本概念,重点阐述了性能瓶颈的识别和性能监控的分析工具,以及优化的目标与策略。其次,通过索引优化技术、查询优化以及系统配置调整三方面深入介绍了性能调优实践。此外,还详细讨论了数据库高可用
【精通Matlab】:工业机器人轨迹规划与运动控制的实战指南
# 摘要
本文综述了Matlab在工业机器人领域的应用,包括机器人运动学基础理论、轨迹规划、运动控制以及轨迹优化的高级应用。首先,介绍了机器人运动学
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )