【动态规划】:从递归树到动态规划表的转换策略
发布时间: 2024-09-13 03:34:08 阅读量: 44 订阅数: 39 

树形DP(动态规划).pptx

# 1. 动态规划的理论基础
## 1.1 动态规划的概念与适用性
动态规划(Dynamic Programming,DP)是一种在数学、管理科学、计算机科学和经济学中应用非常广泛的算法思想。它通常用于求解具有重叠子问题和最优子结构特性的问题。重叠子问题意味着在问题求解的过程中,会多次遇到同样的子问题,而最优子结构则是指一个问题的最优解包含其子问题的最优解。
动态规划有两个基本要素:最优子结构和边界条件。在实际应用中,通过构建状态转移方程来递归地定义最优解,然后通过“自底向上”的方式,即从最小的子问题开始,逐步求解并存储每个子问题的解,避免重复计算,从而得到整个问题的最优解。
理解动态规划的适用场景和核心概念是掌握动态规划算法的前提。接下来的章节将详细探讨递归算法的原理,它是动态规划的基础。
# 2. 递归算法的原理与应用
## 2.1 递归的基本概念
### 2.1.1 递归函数的定义
递归函数是一种特殊的函数,它在执行过程中会直接或间接调用自身。递归的思想是把复杂问题分解成简单的子问题,通过解决子问题最终解决原问题。每个递归函数通常都包含两个基本要素:基本情况(base case)和递归情况(recursive case)。基本情况是递归不再继续的条件,通常是最简单的子问题;递归情况则是函数调用自身以解决更小子问题的过程。
递归函数必须谨慎设计以避免无限递归的发生,这通常通过逐步接近基本情况来实现。在实际应用中,递归函数的编写需要关注递归终止条件的正确性和递归调用的逻辑。
```python
def factorial(n):
# 基本情况
if n == 0:
return 1
# 递归情况
else:
return n * factorial(n - 1)
```
在上面的例子中,`factorial` 函数计算一个数的阶乘。基本情况是当 `n` 等于 0 时,函数返回 1;递归情况则是函数递归地调用自身计算 `n-1` 的阶乘,并将其结果与 `n` 相乘。
### 2.1.2 递归与分治策略
递归通常与分治策略紧密相关。分治策略的核心思想是将一个难以直接解决的大问题分解成若干个小问题,递归地解决这些小问题,然后再将小问题的解合并以得到原问题的解。分治算法包括三个主要步骤:分解、解决和合并。
递归与分治相结合的方法可以有效地解决很多问题,例如快速排序和归并排序算法都是运用分治策略来实现的。快速排序首先选择一个基准值(pivot),然后将数组分为两部分,一部分包含小于基准值的元素,另一部分包含大于基准值的元素。之后,递归地在两个子数组上进行同样的操作,直到每个子数组只包含一个元素或为空,这时排序完成。
```python
def quicksort(arr):
# 基本情况:当数组为空或只包含一个元素时,已经排序完成
if len(arr) <= 1:
return arr
# 递归情况:选择基准值,并进行分区操作
pivot = arr[len(arr) // 2]
left = [x for x in arr if x < pivot]
middle = [x for x in arr if x == pivot]
right = [x for x in arr if x > pivot]
# 递归地对左右子数组进行快速排序
return quicksort(left) + middle + quicksort(right)
```
## 2.2 递归树的构建
### 2.2.1 递归树的结构分析
递归树是分析递归算法性能的一个工具。通过递归树,我们可以直观地看到递归过程中的函数调用层级和每层的调用情况。递归树的每一层表示递归算法在该深度上进行的函数调用,从根节点开始,逐层向下展开,直到达到基本情况的叶子节点。
构建递归树需要注意以下几点:
- 递归树的每个节点对应于递归函数的一个调用实例。
- 树的深度代表递归调用的深度。
- 每个节点可能具有零个或多个子节点,代表递归调用本身或不进行进一步递归调用。
- 递归树的形状取决于基本情况的分布和递归函数的逻辑。
递归树可以帮助我们分析递归算法的时间复杂度,通过观察递归树的结构,我们可以推断出递归过程中的重复计算和递归分支的复杂度。
### 2.2.2 递归树的时间复杂度评估
通过递归树来评估递归算法的时间复杂度,通常涉及到计算树中节点的总数以及每层节点的工作量。时间复杂度的评估可以帮助我们理解算法性能的瓶颈所在,并寻找可能的优化途径。
考虑一个简单的递归算法,如计算斐波那契数列。斐波那契数列中,每个数都是前两个数的和,这个定义本身就是递归的。递归函数如下:
```python
def fibonacci(n):
if n <= 1:
return n
else:
return fibonacci(n-1) + fibonacci(n-2)
```
对应的递归树将有指数级的节点数目,因为每个非叶节点都产生两个子节点。节点总数大约是 2^n,这是一个非常大的数字,即使是对于相对较小的 `n` 值。因此,斐波那契数列的递归算法具有指数级的时间复杂度,效率非常低。
为了优化时间复杂度,可以采用记忆化技术,即存储已经计算过的结果以避免重复计算。这是动态规划方法的基本思想,它能将递归树的时间复杂度降低至线性。
## 2.3 递归算法的实例分析
### 2.3.1 斐波那契数列的递归实现
斐波那契数列是一个典型的递归问题,数列中的每个数都是前两个数的和,定义如下:
```
F(0) = 0, F(1) = 1
F(n) = F(n-1) + F(n-2), for n > 1
```
递归算法实现如下:
```python
def fibonacci(n):
if n <= 1:
return n
else:
return fibonacci(n-1) + fibonacci(n-2)
```
斐波那契数列的递归实现非常直观,但它的效率很低。这是因为许多相同的子问题被重复解决,特别是当 `n` 较大时,递归树非常深,而树的节点数呈指数级增长。这种现象称为重复子问题,是许多递归算法中常见的问题。
### 2.3.2 斐波那契数列的优化探讨
针对斐波那契数列递归实现的低效率,可以采取多种优化手段。最简单的方法是利用记忆化技术,即存储已经计算过的斐波那契数,避免重复计算。
```python
def fibonacci_memo(n, memo):
if memo[n] is not None:
return memo[n]
if n <= 1:
memo[n] = n
else:
memo[n] = fibonacci_memo(n-1, memo) + fibonacci_memo(n-2, memo)
return memo[n]
# 初始化一个长度为 n+1 的列表用于存储已计算的斐波那契数
memo = [None] * (n + 1)
print(fibonacci_memo(n, memo))
```
在上面的代码中,我们引入了一个列表 `memo` 用于存储已经计算过的斐波那契数。这样,在函数调用时,我们首先检查 `memo` 中是否已经存储了结果,如果有,则直接返回该结果。这种方法显著减少了不必要的计算,将时间复杂度从指数级降低到了线性。
此外,还可以使用动态规划方法来优化斐波那契数列的计算。动态规划采用自底向上的方法,先计算斐波那契数列的前两个数,然后逐步计算出后续的数值。这种方法不仅效率高,而且代码实现也更加简洁。
```python
def fibonacci_dp(n):
fib = [0] * (n + 1)
fib[1] = 1
for i in range(2, n + 1):
fib[i] = fib[i-1] + fib[i-2]
return fib[n]
```
通过动态规划,我们避免了递归调用的开销,并且只用一个列表来存储中间结果,从而极大地提高了计算效率。
以上是第二章中有关递归算法原理与应用的详细介绍。每节内容不仅包含了递归算法的核心概念和应用实例,还深入探讨了递归树构建以及递归算法优化的策略和方法。本章内容旨在帮助读者深刻理解递归算法的工作原理和提高编写递归算法的技巧。在下一章中,我们将继续深入探讨动态规划的核心思想与方法。
# 3. 动态规划的核心思想与方法
## 3.1 动态规划的概念和特点
### 3.1.1 重叠子问题和最优子结构
动态规划是解决多阶段决策问题的一种方法,其核心思想是将复杂问题分解为子问题,并通过存储子问题的解,避免重复计算,从而达到优化算法性能的目的。在动态规划中,重要的概念包括重叠子问题(Overlapping Subproblems)和最优子结构(Optimal Substructure)。
重叠子问题意味着在递归求解过程中,相同的子问题会多次出现。动态规划通过存储这些子问题的解(通常使用数组或表格),在后续需要时直接查表获得,显著减少了计算量。
最优子结构则是指一个问题的最优解包含其子问题的最优解。这允许我们使用自底向上的方法,从简单的子问题逐步构建出原问题的最优解。
例如,在计算斐波那契数列时,`F(n)` 可以由 `F(n-1)` 和 `F(n-2)` 组合而成,而这两个值又是通过相同的方式计算得到的。因此,相同的子问题如 `F(2)` 出现多次,我们可以通过记忆化来避免重复计算。
### 3.1.2 状态转移方程的建立
建立状态转移方程是动态规划中的关键步骤。状态转移方程描述了问题状态如何从一个或多个较小子状态转移而来。
在斐波那契数列的例子中,状态转移方程可以写为:
```
F(n) = F(n-1) + F(n-2)
```
而对于更复杂的问题,状态转移方程可能涉及到更多的子状态和条件。例如背包问题,其状态转移方程可能包含是否选取当前物品的决策:
```
dp[i][w] = max(dp[i-1][w], dp[i-1][w-wt[i]] + val[i])
```
其中,`dp[i][w]` 表示对于前 `i` 个物品,当前背包容量为 `w` 时的最大价值。
## 3.2 动态规划解题的一般步骤
### 3.2.1 确定状态表示
在解决问题之前,首先需要定义状态表示。状态表示应该能够涵盖问题的所有可能状态,并且能够有效地描述问题的解决方案。
在动态规划问题中,状态通常用一个或多个变量来表示,这些变量在问题的不同阶段可以取不同的值。状态的设计需要确保能够表示问题的所有子问题,并且能够通过子问题的解来推导出原问题的解。
### 3.2.2 状态转移方程的推导
状态转移方程是动态规划的核心,它体现了从一个状态到另一个状态的转变规律。推导状态转移方

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了数据结构中递归的应用和消除递归的方法。它涵盖了递归的原理、在数据结构中的应用、递归到迭代的转换技巧、递归和栈之间的关系、递归深度控制和优化策略、递归算法在树遍历、搜索、大数据处理和动态规划中的应用。此外,还介绍了尾递归优化、图算法递归思想、递归算法测试、并发编程、内存管理、效率提升、递归下降解析器、分治法、递归模型设计、缓存策略、正则表达式、性能评估和并行化等主题。通过深入浅出的讲解和丰富的实例,本专栏旨在帮助读者掌握递归在数据结构中的应用和优化技巧,从而构建高效、灵活的算法。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Catia曲线曲率分析深度解析:专家级技巧揭秘(实用型、权威性、急迫性)
# 摘要
本文全面介绍了Catia软件中曲线曲率分析的理论、工具、实践技巧以及高级应用。首先概述了曲线曲率的基本概念和数学基础,随后详细探讨了曲线曲率的物理意义及其在机械设计中的应用。文章第三章和第四章分别介绍了Catia中曲线曲率分析的实践技巧和高级技巧,包括曲线建模优化、问题解决、自动化定制化分析方法。第五章进一步探讨了曲率分析与动态仿真、工业设计中的扩展应用,以及曲率分析技术的未来趋势。最后,第六章对Catia曲线曲率分析进行了
【MySQL日常维护】:运维专家分享的数据库高效维护策略
# 摘要
本文全面介绍了MySQL数据库的维护、性能监控与优化、数据备份与恢复、安全性和权限管理以及故障诊断与应对策略。首先概述了MySQL基础和维护的重要性,接着深入探讨了性能监控的关键性能指标,索引优化实践,SQL语句调优技术。文章还详细讨论了数据备份的不同策略和方法,高级备份工具及技巧。在安全性方面,重点分析了用户认证和授权机制、安全审计以及防御常见数据库攻击的策略。针对故障诊断,本文提供了常
EMC VNX5100控制器SP硬件兼容性检查:专家的完整指南

# 摘要
本文旨在深入解析EMC VNX5100控制器的硬件兼容性问题。首先,介绍了EMC VNX5100控制器的基础知识,然后着重强调了硬件兼容性的重要性及其理论基础,包括对系统稳定性的影响及兼容性检查的必要性。文中进一步分析了控制器的硬件组件,探讨了存储介质及网络组件的兼容性评估。接着,详细说明了SP硬件兼容性检查的流程,包括准备工作、实施步骤和问题解决策略。此外
【IT专业深度】:西数硬盘检测修复工具的专业解读与应用(IT专家的深度剖析)
# 摘要
本文旨在全面介绍硬盘的基础知识、故障检测和修复技术,特别是针对西部数据(西数)品牌的硬盘产品。第一章对硬盘的基本概念和故障现象进行了概述,为后续章节提供了理论基础。第二章深入探讨了西数硬盘检测工具的理论基础,包括硬盘的工作原理、检测软件的分类与功能,以及故障检测的理论依据。第三章则着重于西数硬盘修复工具的使用技巧,包括修复前的准备工作、实际操作步骤和常见问题的解决方法。第四章与第五章进一步探讨了检测修复工具的深入应
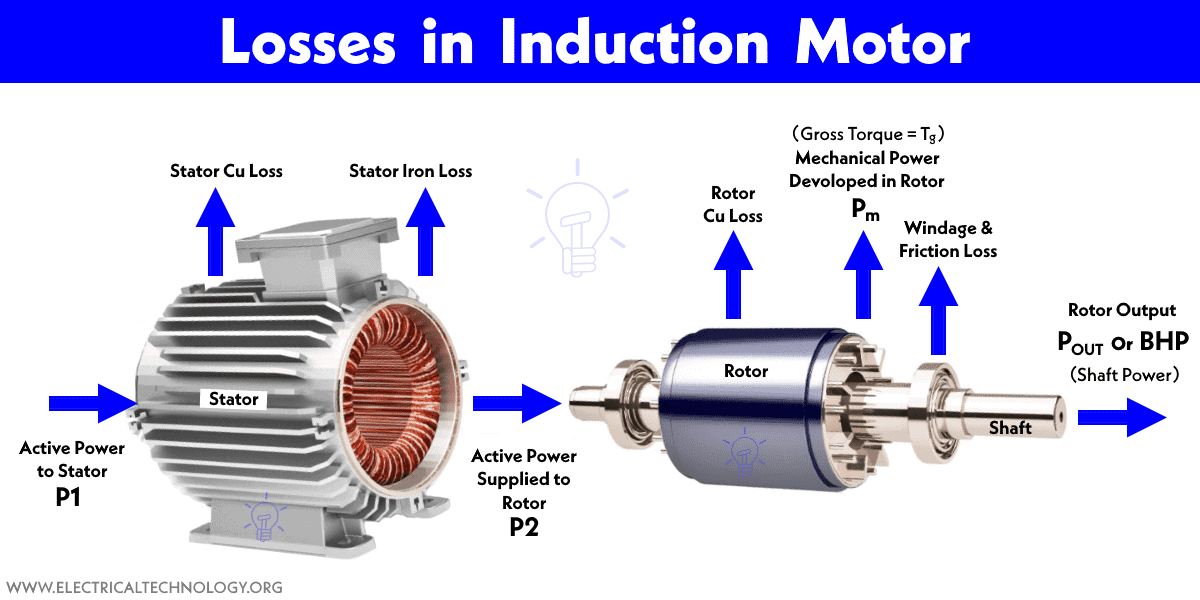
【永磁电机热效应探究】:磁链计算如何影响电机温度管理
# 摘要
本论文对永磁电机的基础知识及其热效应进行了系统的概述。首先,介绍了永磁电机的基本理论和热效应的产生机制。接着,详细探讨了磁链计算的理论基础和计算方法,以及磁链对电机温度的影响。通过仿真模拟与分析,评估了磁链计算在电机热效应分析中的应用,并对仿真结果进行了验证。进一步地,本文讨论了电机温度管理的实际应用,包括热效应监测技术和磁链控制策略的
【代码重构在软件管理中的应用】:详细设计的革新方法

# 摘要
代码重构是软件维护和升级中的关键环节,它关注如何提升代码质量而不改变外部行为。本文综合探讨了代码重构的基础理论、深
【SketchUp设计自动化】

# 摘要
本文系统地探讨了SketchUp设计自动化在现代设计行业中的概念与重要性,着重介绍了SketchUp的基础操作、脚本语言特性及其在自动化任务中的应用。通过详细阐述如何通过脚本实现基础及复杂设计任务的自动化
【CentOS 7时间同步终极指南】:掌握NTP配置,提升系统准确性
# 摘要
本文深入探讨了CentOS 7系统中时间同步的必要性、NTP(Network Time Protocol)的基础知识、配置和高级优化技术。首先阐述了时
轮胎充气仿真深度解析:ABAQUS模型构建与结果解读(案例实战)

# 摘要
轮胎充气仿真是一项重要的工程应用,它通过理论基础和仿真软件的应用,能够有效地预测轮胎在充气过程中的性能和潜在问题。本文首先介绍了轮胎充气仿真的理论基础和应用,然后详细探讨了ABAQUS仿真软件的环境配置、工作环境以及前处理工具的应用。接下来,本文构建了轮胎充气模型,并设置了相应的仿真参数。第四章分析了仿真的结果,并通过后处理技术和数值评估方法进行了深入解读。最后,通过案例实战演练,本文演示了
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )